清华大学顶刊发表|破解无人机抓取与投递难题
在城市配送、应急物资投放和仓储拣选等场景,人们期待无人机能够独立完成“取-运-投”全流程。然而主流多旋翼通常采用下挂式夹爪或机械臂,包裹悬在机体下方,带来重心下移、转动惯量增加等问题。为突破这一结构瓶颈,清华大学机械工程系赵慧婵副教授团队(Soft Robotics Lab),于今年5月在机器人顶刊The International Journal of Robotics Research 发表论文 “A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。论文提出 “中空四旋翼 + 柔性包覆抓手” 架构,通过将机身中央镂空为货仓并在内壁嵌入可充气硅胶抓手,使质心保持在螺旋桨平面,兼顾稳定飞行与高效抓取,为末端物流提供了一种紧凑、稳健的新方案。
视频来源:https://www.youtube.com/watch?v=qKxT7bOusKE
01 研究背景
目前,主流的空中抓取系统多采用以下两种思路:
1. 悬挂式机械臂/夹爪:
常见于空中操作研究,夹爪安装于无人机底部,抓取动作会导致重心偏移,飞控稳定性下降,且操控复杂。
2. 特种抓取机构
磁吸、吸盘、柔性夹爪等方案在特定目标上成功率高,但对包裹材质和尺寸依赖强,通用性与载重受限。
同时,传统多旋翼中央舱被飞控、电池等设备占据,货物只能悬挂,进一步放大质心变化并依赖人工或固定基站装卸。
-
质心与惯量剧变,削弱姿态稳定性
-
抓取机构-飞控耦合复杂,控制难度高
-
高度依赖人工/基站,难以真正实现端到端自主投递
02 技术亮点
本研究围绕无人机空中抓取与投递过程中的质心控制、抓取适应性与降落容差三大核心难点,提出了一种集中心载荷布局、柔性包覆夹爪与被动载荷引导于一体的高性能飞行平台,显著提升了多旋翼在载荷控制、任务适应性与作业效率方面的综合能力。
中空四旋翼设计
研究团队提出的Center-less Quadrotor打破传统“中心-轴臂”布局,采用四旋翼框架围绕中空载荷舱设计,将载荷直接置于无人机中心。
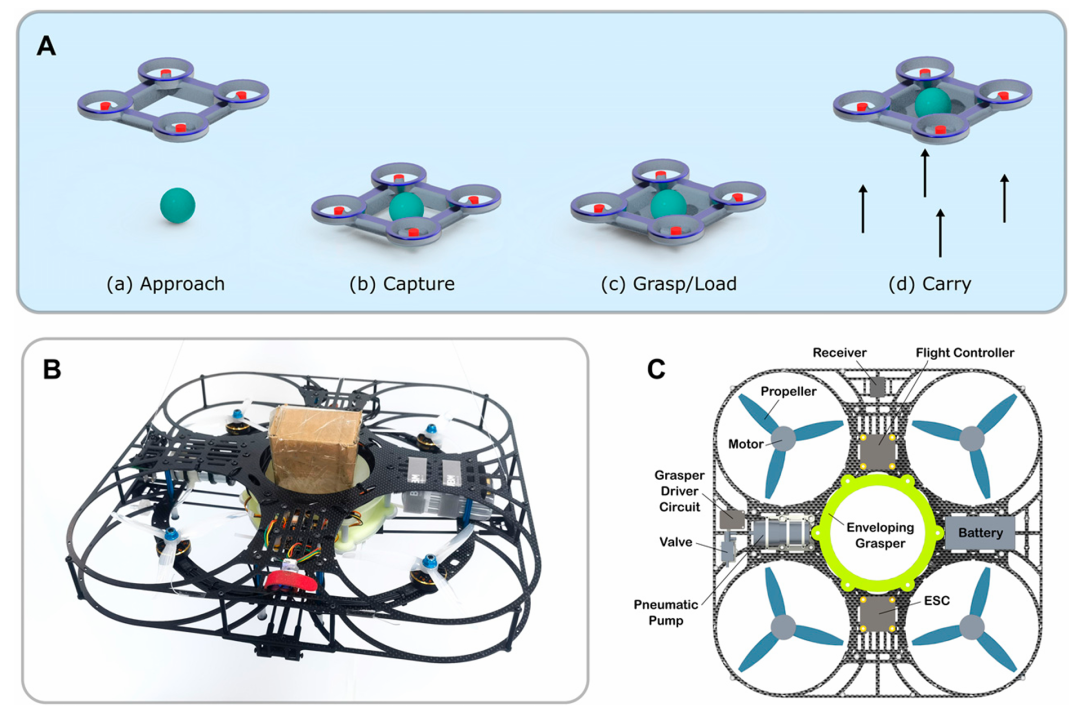
图片来源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),论文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
优势:
1. 保证载荷始终位于无人机重心附近;
2. 减少飞行时的姿态干扰,提升控制一致性;
3. 载荷通过上下通道可自如进出,支持多种作业模式;
4. 动力电池、飞控和电调分别固定在四角梁内,避免了传统中心舱堆叠造成的散热、布线与结构冲突。
柔性包覆夹爪
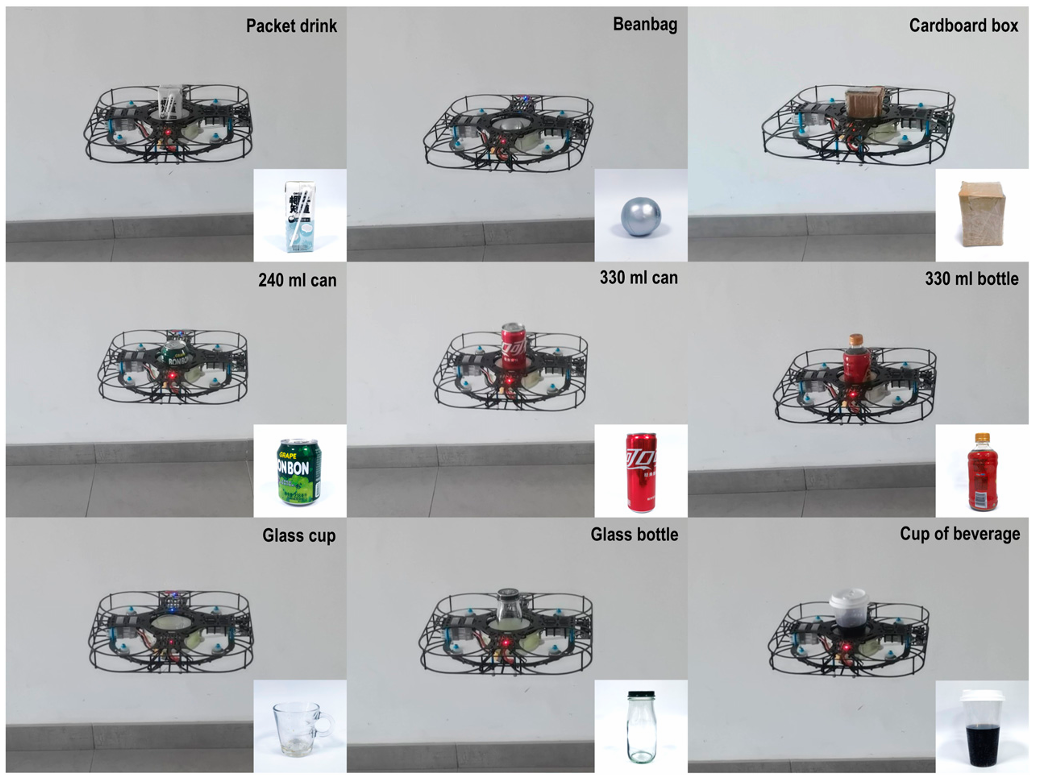
为兼容不同尺寸与材质的包裹,研究团队在90mm中空货仓内壁铺设单腔体硅胶软套,利用机载气泵充气驱动实现全包覆抓取。测试表明,夹爪最大可夹持500g物体,可靠承载高达自重60%的负载。具有如下特点:1. 环形硅胶夹持层,内置气腔,通气后向内膨胀包覆目标平均9.8s充满、5.8s泄气复位;2. 高适应性:可适应多种尺寸与形状的物体;3. 高安全性:软材料减小对物体的挤压力,适合抓取易碎物。
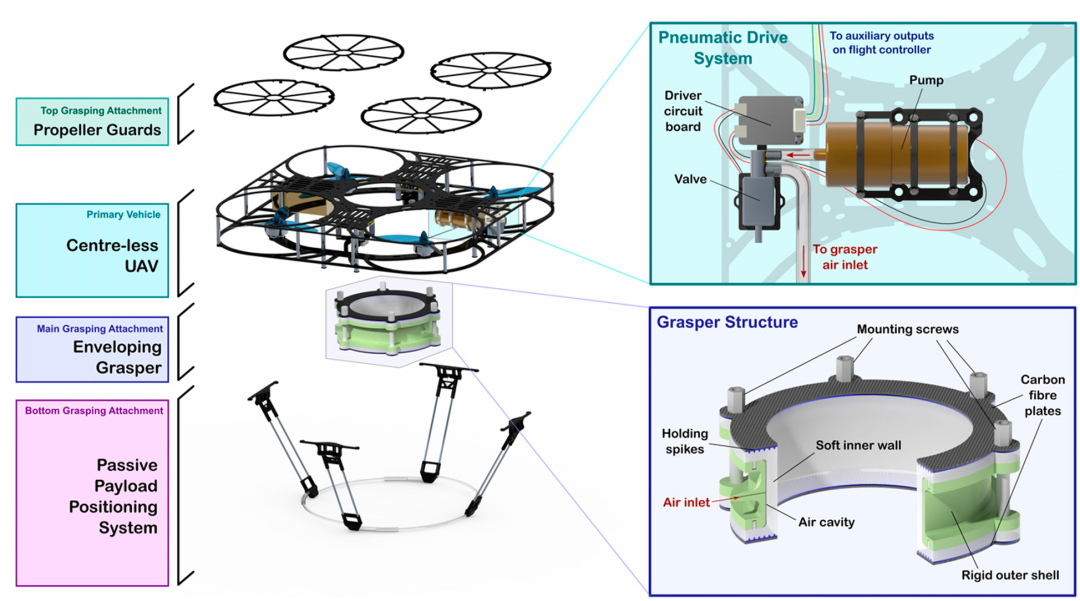
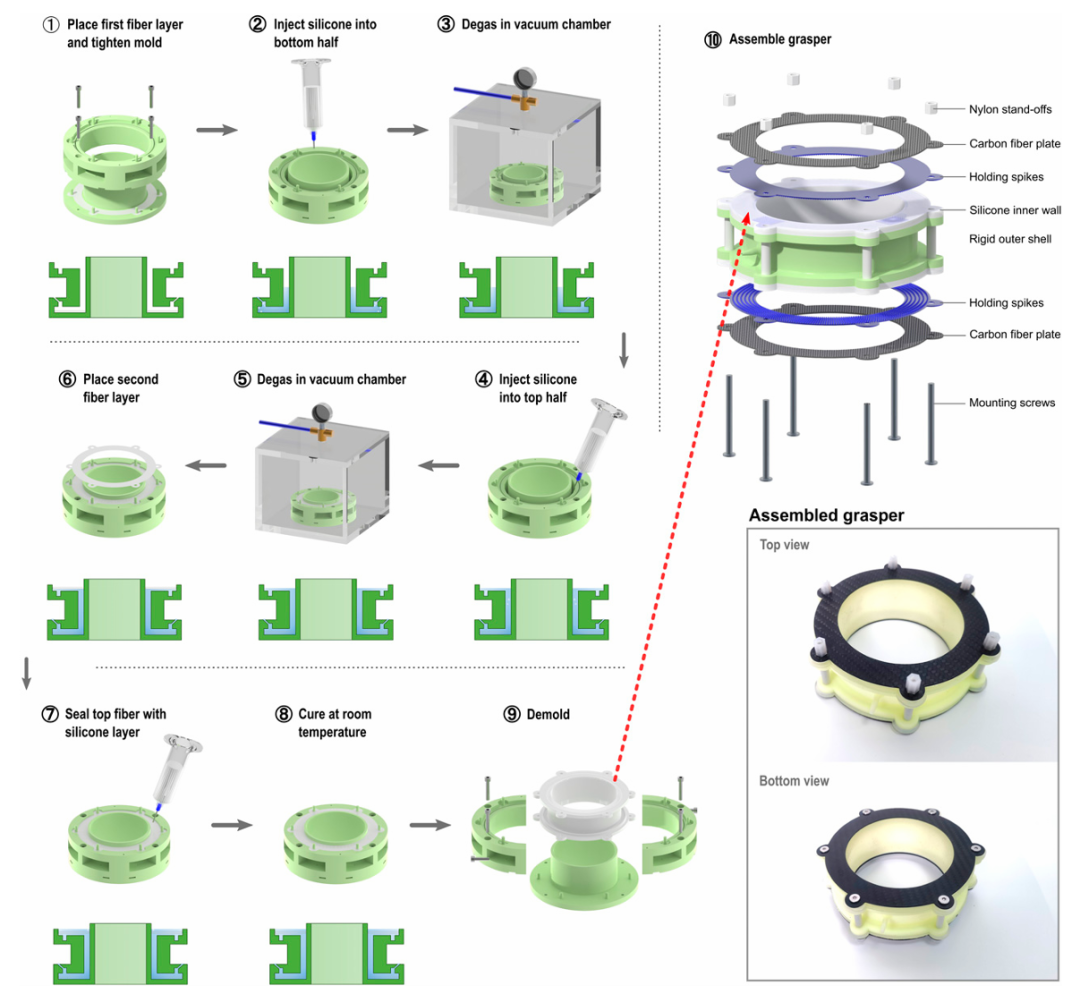
图片来源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),论文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
被动载荷引导系统(PPP)
针对抓取时无人机定位误差的问题,团队创新性地设计了被动载荷引导系统,在机体下方集成了一个PTFE伸缩环:
- 飞行阶段环直径保持约210mm,形成远大于抓手的捕获窗口;触地瞬间导向环受压沿滑轨回缩,直径约为80mm,将包裹顺势推入位于机身中心的柔性抓手;
- 无需电机或传感器,结构轻量,使有效捕获面积扩大约6.9 倍,显著放宽无人机降落定位精度要求并提升自主抓取成功率。
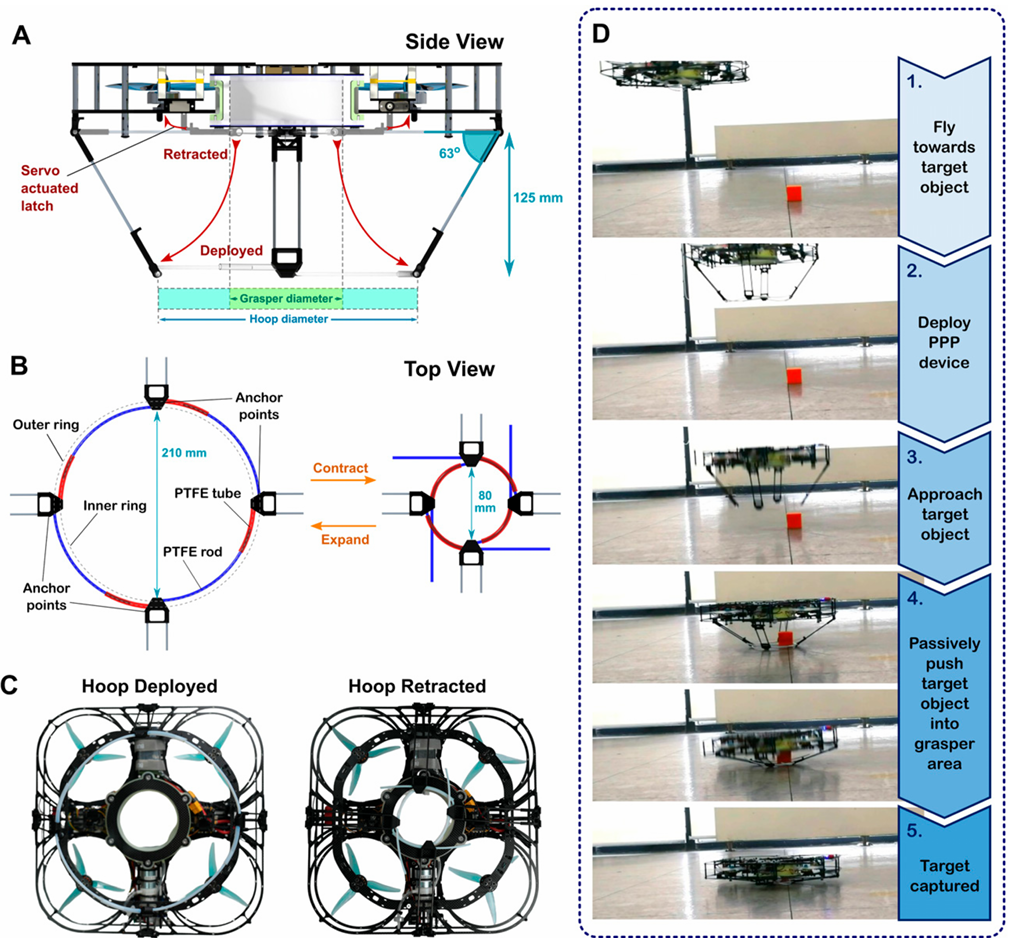
图片来源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),论文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
03 实验测试
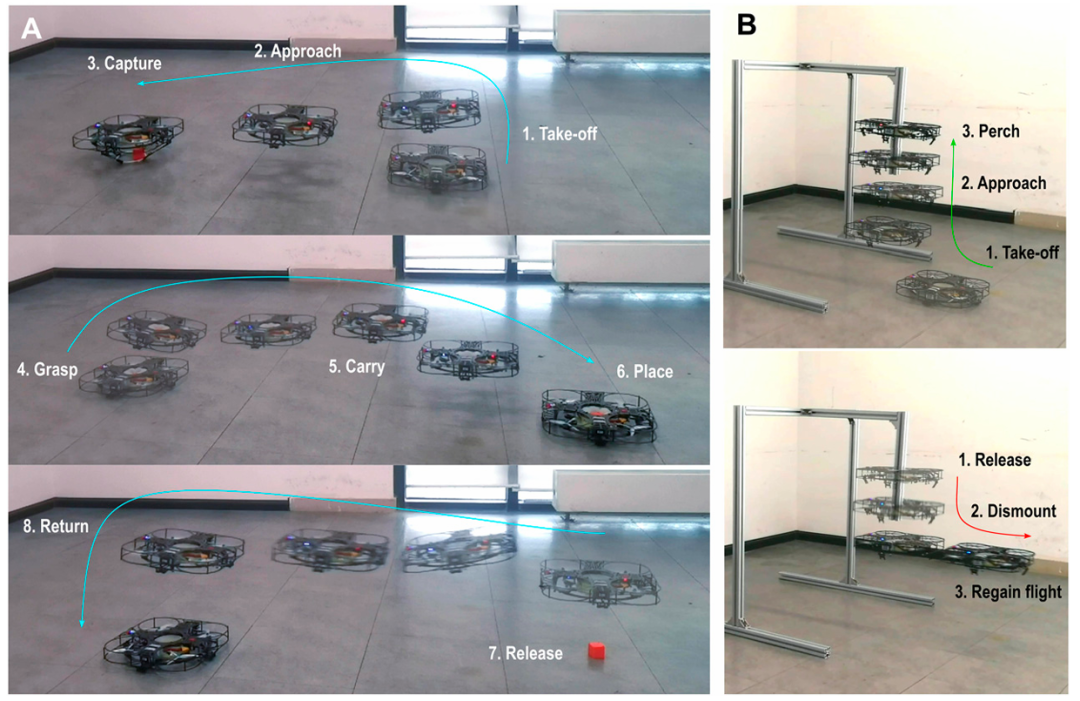
多物体“抓-运-投”演示
无人机搭载柔性夹爪,完成了多种典型物体的抓取飞行测试,目标包括:饮料罐、玻璃杯、软包装盒、异形玩具。此外,系统还支持空中倒挂抓取、垂直柱体停靠等扩展功能,具备良好的实用性与拓展潜力。
-
抓取-起飞成功率100%
-
运输过程中滚/俯仰姿态均方误差保持 ≤ 0.6 °
-
释放点水平误差<5 cm
图片来源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),论文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
被动载荷引导测试
团队测试了被动载荷引导系统(PPP)在自主降落过程中的引导效果。
测试场景
-
无人机降落至目标物体上方,PPP展开后引导物体进入夹爪区域。
-
通过地面反作用力,环形引导器自动收缩,将物体准确送入抓取范围。
测试结果
-
导向环将捕获面积扩大约6.9倍,显著放宽降落定位误差。
-
无需电机或传感器,可在一定程度上减轻对高精度环境感知与控制的依赖。
图片来源:Yu Herng Tan等,《The International Journal of Robotics Research》(2025),论文“A Center-less Quadrotor Design with a Soft Enveloping Grasper for Aerial Grasping and Delivery Tasks”。
资源速递
论文链接:https://journals.sagepub.com/doi/10.1177/02783649251339772
文章内容仅用于学术交流与技术分享,图文资料版权归原作者及期刊所有,如有侵权请联系删除。
如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:bbs.amovlab.com
有工程师亲自解答10000+无人机开发者和你共同进步!