深度相机的工作模式(以奥比中光深度相机为例)
深度相机的工作模式是设备根据不同应用场景需求,通过优化硬件参数(如曝光时间、光源强度)和软件算法(如深度计算逻辑、噪声抑制策略)形成的特定运行状态。其核心目的是在精度、帧率、功耗、抗干扰能力等关键指标间做针对性平衡,以适配不同场景(如近距离交互、动态追踪、户外强光环境等)。
一、深度相机工作模式的核心设计逻辑
深度相机的核心功能是获取场景的三维深度信息(即每个像素点到相机的距离),其工作模式的设计围绕以下维度展开:
- 距离范围:针对近距离(如0.3-1m)、中距离(1-5m)、远距离(5m以上)优化算法;
- 动态特性:针对静态场景(如物体测量)或动态场景(如人体运动追踪)调整帧率和运动模糊抑制;
- 环境适应性:针对室内弱光、户外强光、复杂纹理(如白墙)等环境优化抗干扰能力;
- 精度需求:针对高精度测量(如工业检测)或低精度快速响应(如机器人避障)调整计算复杂度。
深度相机常见的工作模式包括以下几种:
- 标准模式(Standard Mode):相机在常规精度和速度下工作,适用于一般的深度图像采集任务。
- 高精度模式(High Accuracy Mode):相机在此模式下进行更高精度的深度测量,通常会降低帧率,以提高测量精度。这种模式适合需要高度准确性和较慢运动的应用。
- 低功耗模式(Low Power Mode):优化功耗以延长电池寿命,通常会降低深度图像的分辨率或帧率,适用于长时间运行的便携应用。
- 精细模式(Fine Mode):该模式提供更高的深度精度和分辨率,但帧率较低,适用于需要精确深度信息的应用,如3D扫描和物体检测。
- 快速模式(Fast Mode):为了提高帧率,可能会降低精度,适合实时处理应用,如机器人导航、动作识别等。
- 测量模式(Dimensioning Mode):专为物体尺寸测量设计,优化深度精度,提供高精度的距离测量,适用于工业测量和3D建模。
- 降噪模式(Noise Reduction Mode):该模式会对深度数据进行处理,以减少噪声和误差,提供更加稳定的深度数据。
- 自适应模式(Adaptive Mode):根据环境变化动态调整采集参数,适用于环境变化较大的场景。
深度相机的工作模式决定了相机如何采集、处理和输出深度图像数据。不同的工作模式会影响深度数据的精度、分辨率、帧率、功耗等多个因素。不同的深度相机厂商通常提供多种工作模式,满足不同的应用需求,比如精度、速度、功耗等。
二、奥比中光(Orbbec)深度相机的典型工作模式
奥比中光是国内领先的3D视觉方案提供商,其深度相机主要基于结构光技术(通过发射编码红外光图案,分析图案畸变计算深度),部分型号支持TOF(飞行时间)技术。其工作模式设计紧密结合消费级(如智能交互)和工业级(如尺寸测量)场景,
Orbbec的深度工作模式主要包括:
-
Dimensioning Mode:适用于工业尺寸测量应用,提供较高的深度精度。通常用于机器人视觉、3D建模、物体检测和自动化。
-
Default Mode:标准工作模式,通常用于一般的深度图采集和处理,不特别优化精度或帧率。适用于大多数常规应用,如人脸识别、手势识别等。
-
Binned Mode:通过将多个相邻像素的数据合并来减少分辨率,减少计算量并提高帧率,适合处理速度要求较高的应用。
-
Unbinned Mode:该模式下,传感器输出的是全分辨率的深度图像,适用于需要较高精度的应用,但帧率相对较低。
-
Low Power Mode:为了优化功耗,降低功耗以延长相机使用时间或适应便携应用,通常会在深度图像的分辨率或帧率方面作出一定的牺牲。
-
Sparse Mode:与标准模式类似,但是在减少像素数据量的同时,保留了图像的主要深度信息,适用于需要较少计算资源的情况。
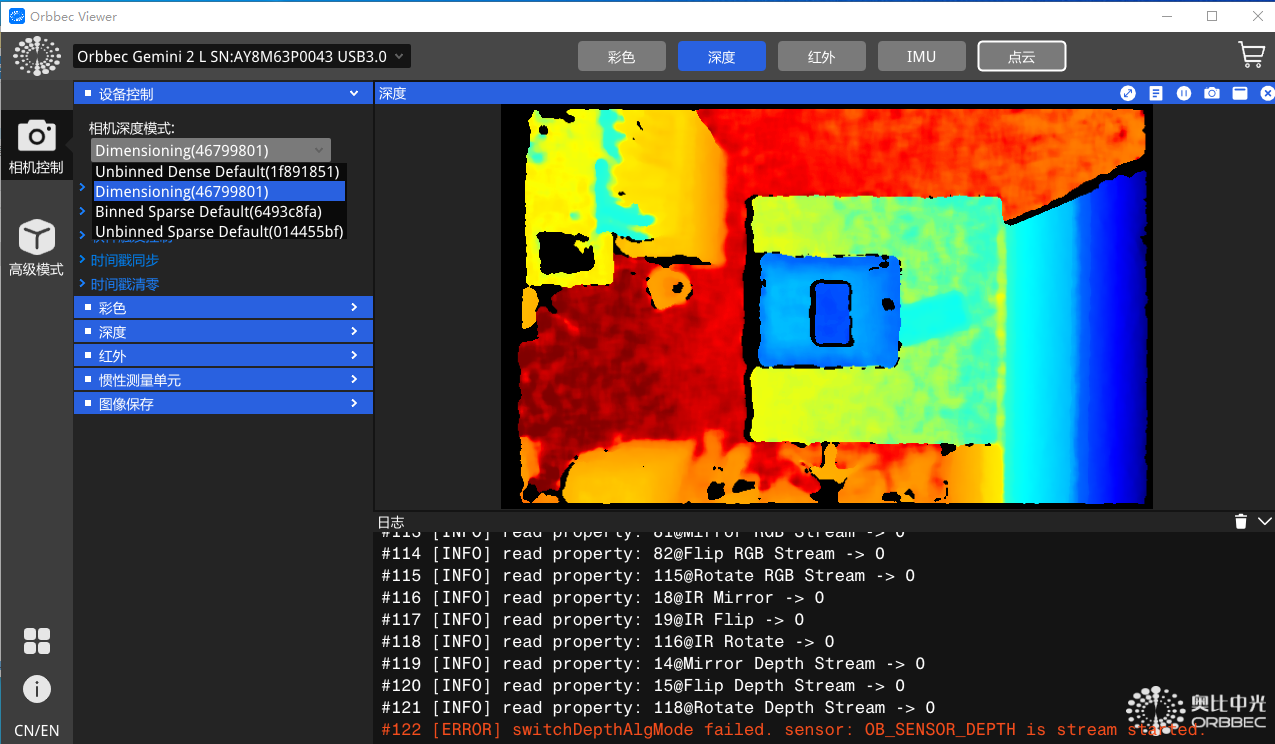
当前相机具有哪些模式,可以在奥比中光的orbbec Viewer中查看。
2.1 Dimensioning Mode(测量模式)
-
功能:在该模式下,奥比中光深度相机被优化用于精准的尺寸测量,提供较高的深度精度。此模式会在深度数据的采集和处理上做出优化,通常会牺牲部分帧率以提高深度精度。适用于对精度要求极高的工业检测和物体尺寸测量任务。
-
应用场景:
- 工业测量:在工业生产中,需要准确测量物体的尺寸、位置和相对关系。
- 3D建模:用来重建高精度的三维模型,例如扫描一个物体并精确计算其三维形状。
- 自动化检测:通过对产品尺寸的检测,进行质量控制。
-
优势:提供高精度的深度信息,有助于减少误差,提高测量结果的可靠性。
-
缺点:通常会牺牲帧率,可能不适用于动态或快速运动的场景。
2.2 Default Mode(默认模式)
-
功能:这是相机的常规工作模式,通常在精度和帧率之间做一个平衡,适用于大部分常规深度图像采集任务。不会特别优化精度,但提供一个较为通用的解决方案。
-
应用场景:
- 人脸识别:适用于对精度要求不是很高的人脸识别应用。
- 手势识别:适用于识别用户的手势,并进行控制操作。
- 室内定位:用于室内环境中对空间进行定位和导航。
-
优势:平衡了精度和性能,适用于大多数应用。
-
缺点:在某些高精度要求的应用中,可能不如“Dimensioning Mode”精确。
2.3 Binned Mode(压缩模式)
-
功能:该模式通过将多个相邻像素的数据合并,降低图像的分辨率,从而减少计算量并提高帧率。适用于需要较高帧率的应用,但精度稍有下降。
-
应用场景:
- 动态场景捕捉:当需要捕捉快速移动的物体时,选择Binned Mode可以提高帧率,使得深度图的更新速度更快。
- 运动追踪:对于需要快速处理的实时运动追踪任务,Binned Mode可以提供更高的处理速度。
-
优势:提高了帧率,适合快速移动场景。
-
缺点:图像的深度精度会有所牺牲。
2.4 Low Power Mode(低功耗模式)
-
功能:低功耗模式旨在减少设备的能耗,延长设备的工作时间。该模式会降低深度图的分辨率或帧率,减少电池消耗,适用于长时间运行的应用。
-
应用场景:
- 便携设备:在便携设备(如手持设备或无人机)中使用,优化电池寿命。
- 长时间监控:对于需要持续监控和采集的场景,低功耗模式非常有用。
-
优势:显著降低功耗,延长设备的使用时间。
-
缺点:精度和帧率可能降低,适用于低精度要求的应用。
2.5 Sparse Mode(稀疏模式)
-
功能:该模式降低了数据采集的密度,通过减少像素数据量来提高速度,保留了图像的主要深度信息,适用于低计算资源的场景。
-
应用场景:
- 实时图像处理:用于处理速度要求较高但精度要求不高的应用。
- 大范围扫描:在大范围的空间中,使用稀疏模式能够快速获取较低分辨率的深度图。
-
优势:可以快速捕获深度信息,减少计算负担。
-
缺点:由于数据稀疏,可能无法提供非常精确的深度信息。
三、奥比中光模式切换的实现逻辑(以API为例)
奥比中光通过SDK提供模式切换接口(如switchDepthWorkMode()),其底层实现流程如下:
- 停止当前深度流输出;
- 根据目标模式调整硬件参数(如红外LED驱动电流、传感器曝光时间);
- 加载对应模式的算法配置文件(如深度计算权重、噪声抑制阈值);
- 重启深度流,输出适配新模式的深度数据。
奥比中光的深度工作模式本质是“场景适配的算法包”,通过封装复杂的参数调优逻辑,让用户无需理解底层技术细节,仅通过简单的模式切换即可快速适配场景。这种设计极大降低了深度相机的使用门槛,使其能广泛应用于消费电子、工业检测、智能物流等领域。
四 如何选择深度工作模式
选择合适的深度工作模式时,应根据以下几个因素做出决策:
- 精度要求:如果应用对深度图的精度要求较高,应该选择“Dimensioning Mode”或“High Accuracy Mode”。
- 帧率要求:如果应用需要实时响应或处理快速动态场景,可以选择“Fast Mode”或“Binned Mode”来提高帧率。
- 功耗要求:对于长时间运行的移动设备或无人机等,应该选择“Low Power Mode”来优化功耗。
- 处理能力:如果计算资源有限,可以选择“Sparse Mode”或“Low Resolution Mode”来减少数据量。