【代码】基于CUDA优化的RANSAC实时激光雷达点云地面分割
基于CUDA优化的RANSAC实时激光雷达点云地面分割
摘要: 本文介绍了一个高性能的激光雷达(LiDAR)地面分割项目。该项目基于RANSAC平面估计算法,并通过深度CUDA并行优化,将核心处理时间从近100ms缩短至10ms以内,实现了在复杂场景下的实时、稳定、精确的地面与非地面点云分离。
虽然我仍然在优化这个项目,但当前效果足以应用于绝大多数机器人点云地面分割任务、甚至一些复杂场景。
关键词: CUDA, RANSAC, 点云, 地面分割, PCL, 自动驾驶, 机器人
一、项目简介
在自动驾驶和机器人领域,对三维点云进行实时、准确的地面分割是环境感知的关键一步。它能够为路径规划、障碍物检测等上层应用提供可靠的基础。然而,在处理每秒数十万甚至上百万点的激光雷達數據時,如何在保证精度的同时达到实时性要求,是一个巨大的挑战。
本项目旨在解决这一挑战,实现了一个基于RANSAC算法的地面分割程序。与传统方法不同,我们利用NVIDIA GPU的并行计算能力,对核心算法进行了深度优化,最终在典型的KITTI数据集中取得了优异的性能表现。
项目仓库地址:
https://github.com/MengWoods/enhanced-RANSAC-ground-segmentation
二、核心特性
- CUDA并行加速:项目的核心——RANSAC平面估计算法,完全在GPU上实现。通过精心设计的并行协同Kernel,处理速度相比传统实现有超过10倍的提升。
- 鲁棒的估计与回退机制:内置了移动平均缓冲区,当实时RANSAC估计因点云稀疏等原因失败时,系统能够自动回退,提供一个基于近期历史数据的稳定平面结果。
- 真实世界场景优化:算法在开发过程中充分考虑了真实世界的复杂情况,集成了针对垂直墙面等特殊结构影响平面估计的优化逻辑。
- 可配置的预处理流:包含体素滤波(VoxelGrid)、直通滤波(Box Filter)、统计滤波(Statistical Outlier Removal)等多种预处理模块,可根据场景需求自由组合和配置。
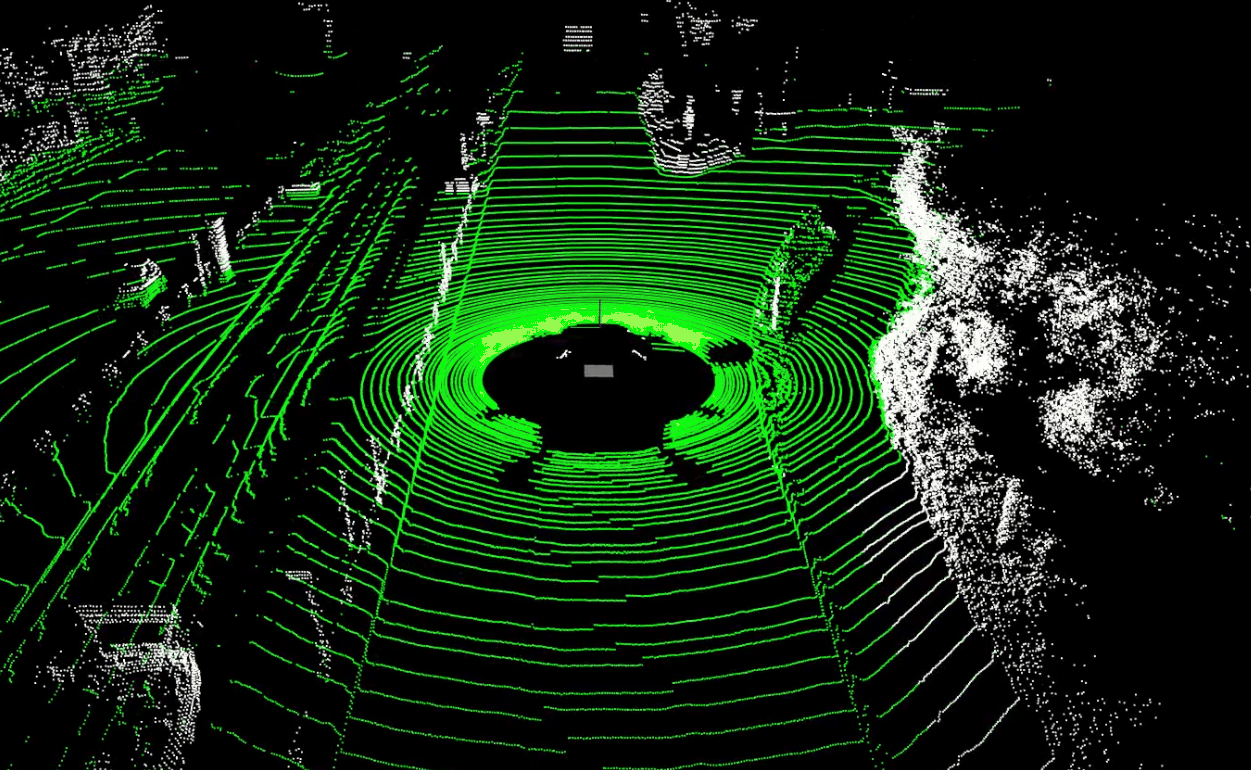
- 实时三维可视化:使用PCL库(Point Cloud Library)进行实时渲染,直观地展示地面点(绿色)与非地面点(白色)的分割结果。
- 稳定的帧率控制:主循环带有频率控制器,可以稳定在指定频率(如15Hz)运行,确保输出的平滑性,满足机器人系统的实时需求。
- 详细的性能日志:可选的计时器可以打印出每一帧中各个处理步骤的耗时,方便进行性能分析和调优。
三、性能
------------------- Frame -------------------
[Timer] Box Filter: 5 ms
[Timer] Voxel Filter: 12 ms
[Timer] Noise Filter: 0 ms
[Timer] Ground Estimation: 12 ms
[Timer] Visualization: 0 ms
[Timer] Total Frame Time: 66 ms
说明: Total Frame Time (总帧率时间) 由配置文件中的 frequency 参数控制(此例中为15Hz,即约66ms/帧)。可以看到,所有核心处理步骤(滤波、地面估计)的总和远小于目标帧时间,证明了算法的高效性。
四、效果演示
我们在KITTI数据集中选取了高速、城市、住宅区三种典型场景进行了测试,算法均表现出高度的稳定性和准确性。

点击图片观看YouTube演示视频
五、未来计划 (Roadmap)
本项目仍在积极开发中,未来的工作将聚焦于多个维度的增强。
在性能方面,计划使用OpenMP并行化技术来加速CPU端的噪声滤波器。
在分割逻辑上,将增加对“地下点”的识别,并着重优化算法在斜坡、视线遮挡等复杂场景下的鲁棒性。
算法层面,将探索引入卡尔曼滤波器(Kalman Filter)来预测平面系数,以获得更好的时序稳定性。
最后,在高级特性方面,会引入基于距离的概率模型,赋予近处点云更高的权重,从而进一步提升估计的精度。