步态循环(Gait Cycle)
步态循环
- 一、什么是步态循环(Gait Cycle)
- 二、步态周期的两大阶段
- 支撑期细分(约 60%):
- 摆动期细分(Swing Phase,约 40%):
- 三、关键关节的行为(Hip、Knee、Ankle)
- 髋关节 Hip:
- 膝关节 Knee:
- 踝关节 Ankle:
- 四、常见生物力学指标(助力控制必备)
- 应用于外骨骼的场景
一、什么是步态循环(Gait Cycle)
定义:
步态循环是同一只脚从一次触地(Heel Strike)到下一次触地的完整运动周期,通常用 百分比(0%–100%) 表示。
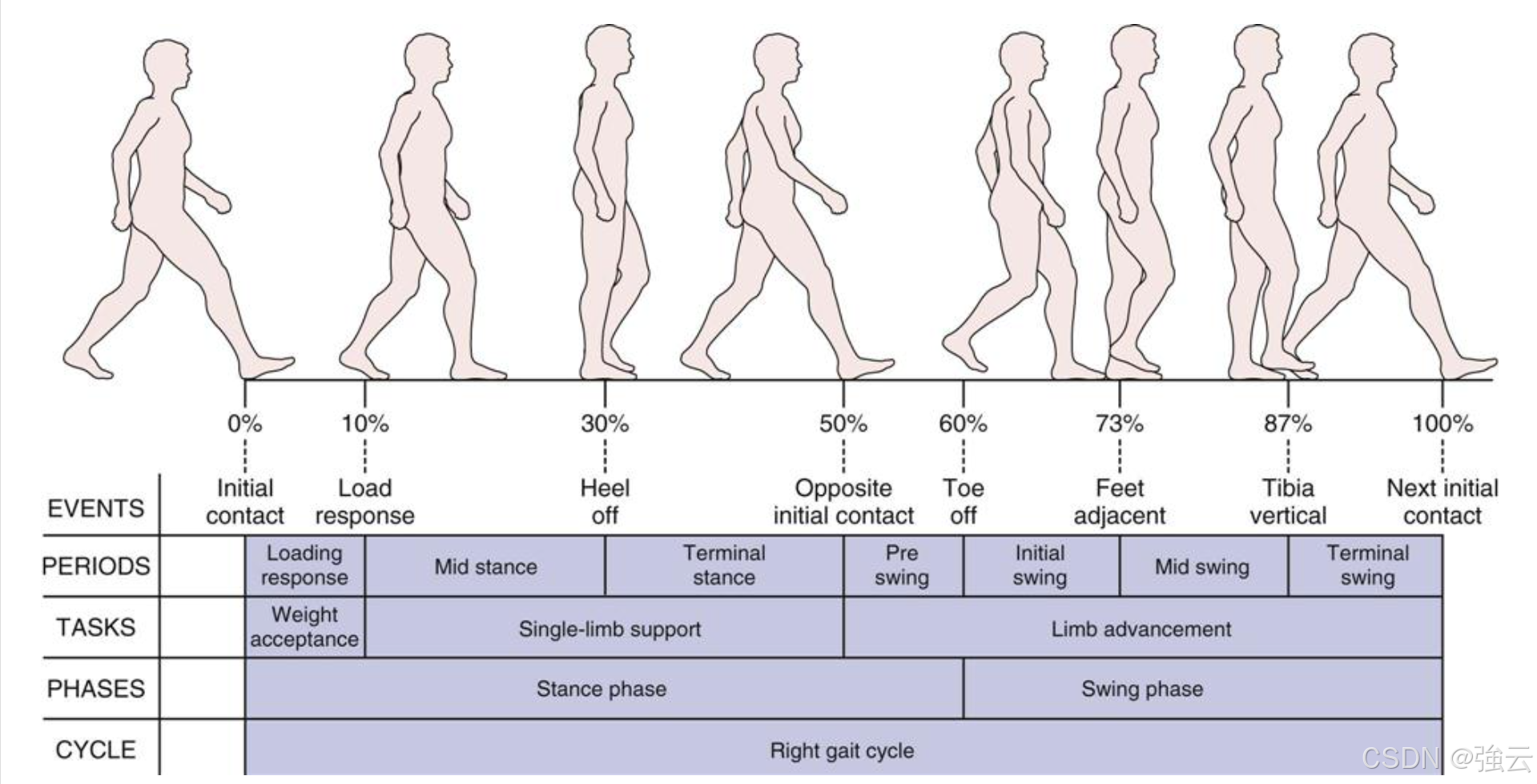
上述图片来自:https://musculoskeletalkey.com/assessment-of-gait/
二、步态周期的两大阶段
| 阶段 | 百分比 | 简介 |
|---|---|---|
| 支撑期 Stance Phase | 0%–60% | 足部与地面接触,用于支撑身体重量 |
| 摆动期 Swing Phase | 60%–100% | 足部腾空前摆,为下一次接触做准备 |
支撑期细分(约 60%):
- Initial Contact(初始接触)
-
时间:0%
-
关键事件:Heel Strike(脚跟触地)
-
关节行为:
-
髋关节屈曲(~30°)
-
膝关节接近伸直
-
踝关节中立或轻微背屈
-
-
肌肉:胫前肌、股四头肌开始活跃
-
外骨骼助力提示:通常不助力,可用于步态事件的触发(FSM状态重置)
- Loading Response(负重反应)
-
时间:0%–10%
-
描述:身体重量转移到脚上
-
关键动作:膝关节屈曲(减震)
-
关节行为:
-
膝关节轻屈(~15°)
-
髋继续屈曲,踝快速跖屈
-
-
肌肉:大腿肌群协同控制膝盖屈曲,胫前肌控制脚掌着地
-
外骨骼助力提示:缓冲期,外骨骼若助力,需精细调控阻尼,否则会阻碍自然缓冲
- Mid Stance(中期支撑)
-
时间:10%–30%
-
描述:身体重心正好位于脚的正上方
-
关键事件:另一脚离地,单腿支撑开始
-
关节行为:
-
髋由屈曲转为伸展
-
膝逐渐伸直
-
踝背屈达到高点
-
-
肌肉:臀大肌、股四头肌活跃维持姿态
-
外骨骼助力提示:可提供轻微支撑力矩,协助髋膝抗重力
- Terminal Stance(末端支撑)
-
时间:30%–50%
-
描述:身体重心向前移动,脚跟抬起
-
关键事件:Heel Off(脚跟离地)
-
关节行为:
-
髋继续伸展
-
踝快速跖屈
-
-
肌肉:小腿三头肌(比目鱼、腓肠肌)发力产生推进力
-
外骨骼助力提示:可提供推进助力,尤其是踝关节(软体外骨骼常在此施力)
- Pre-Swing(预摆期)
-
时间:50%–60%
-
描述:准备抬腿,脚趾最后接触地面
-
关键事件:Toe Off(脚趾离地)
-
关节行为:
-
膝开始屈曲
-
髋屈曲
-
踝达到最大跖屈
-
-
肌肉:腘绳肌开始活动准备抬腿
-
外骨骼助力提示:助力触发时机,开始进入摆动控制状态
摆动期细分(Swing Phase,约 40%):
- Initial Swing(初始摆动)
-
时间:60%–73%
-
描述:脚离地后抬起腿
-
关节行为:
-
膝关节快速屈曲(最高 ~60°)
-
髋开始屈曲
-
踝背屈以避地
-
-
肌肉:髂腰肌、腘绳肌
-
外骨骼助力提示:助力抬腿动作,髋膝柔性引导
- Mid Swing(中期摆动)
-
时间:73%–87%
-
描述:小腿继续前摆,准备伸展
-
关节行为:
-
髋持续屈曲
-
膝开始伸展
-
踝背屈维持
-
-
肌肉:伸膝肌开始控制腿部伸展
-
外骨骼助力提示:可维持轨迹引导,使穿戴者动作更流畅
- Terminal Swing(末端摆动)
-
时间:87%–100%
-
描述:脚准备再次接触地面
-
关键事件:Heel Strike(重新开始循环)
-
关节行为:
-
膝接近伸直
-
髋仍略微屈曲
-
-
肌肉:腘绳肌收缩控制膝伸速度
-
外骨骼助力提示:控制终点位置,避免脚掌“拍地”或晃动
三、关键关节的行为(Hip、Knee、Ankle)
髋关节 Hip:
-
支撑期:从屈曲 (~30°) 到接近伸展 (~0°)
-
摆动期:再屈曲至 ~30°,为脚前摆提供动力
膝关节 Knee:
-
支撑期初:微屈防震(15–20°)
-
中后期:接近伸直
-
摆动期初:屈曲至 ~60°
-
终摆动期:伸展至接触准备
踝关节 Ankle:
-
Initial Contact:背屈(~0°)
-
Mid Stance:慢慢跖屈(负重推进)
-
Toe-Off:最大跖屈 (~15°)
-
摆动期:背屈以避免拖地
四、常见生物力学指标(助力控制必备)
| 指标 | 含义 | 应用 |
|---|---|---|
| 关节角度(Joint Angle) | 髋/膝/踝在步态中的变化曲线 | 控制器目标轨迹 |
| 角速度(Angular Velocity) | 角度的时间导数 | 事件检测、估计意图 |
| 关节力矩(Joint Torque) | 肌肉产生的力矩估算 | 阻抗控制、力控制参考 |
| 地面反作用力(GRF) | 脚接触地面产生的力 | 步态识别、助力触发 |
| 步长(Step Length) | 一只脚到另一脚的距离 | 步态节律评估 |
| 步频(Cadence) | 步数 / 每分钟 | 调整控制参数节奏 |
| 双支撑期时长 | 双脚同时接触地面的时间 | 跟踪平衡与步态稳定性 |
应用于外骨骼的场景
| 步态阶段 | 助力控制常见策略 |
|---|---|
| Heel Strike | 检测触发控制状态机重置 |
| Mid Stance | 提供关节支撑力(如膝关节助力) |
| Toe Off | 助力推进,输出力矩/目标角度 |
| Swing Phase | 控制关节随动轨迹,避免脚拖地 |
| Terminal Swing | 精准位置控制,准备接地 |
| 阶段 | 控制策略建议 |
|---|---|
| 支撑早期 | 最小干预,避免破坏自然缓冲 |
| Mid-Stance | 提供髋/膝支撑助力 |
| Terminal Stance | 适当推进力(尤其是踝) |
| Pre-Swing – Initial Swing | 施加髋屈曲力矩,抬腿助力 |
| Terminal Swing | 控制终点稳定性,准备落地 |