YOLO融合CFFormer中的FeatureCorrection_s2c模块

YOLOv11v10v8使用教程: YOLOv11入门到入土使用教程
YOLOv11改进汇总贴:YOLOv11及自研模型更新汇总
《CFFormer: A Cross-Fusion Transformer Framework for the Semantic Segmentation of Multisource Remote Sensing Images》
一、 模块介绍
论文链接:https://ieeexplore.ieee.org/document/10786275
代码链接:https://github.com/masurq/CFFormer/tree/master
论文速览:
多源遥感图像(RSIs)能够捕捉地面物体的互补信息,用于语义分割。然而,来自不同传感器的多模态数据之间可能存在不一致性和干扰噪声。因此,如何有效减少不同模态之间的差异和噪声,并充分利用其互补特征,是一个挑战。在本文中,我们提出了一种用于多源遥感图像语义分割的通用跨融合变压器框架(CFFormer),采用并行双流结构分别从不同模态中提取特征。我们引入了一个特征校正模块(FCM),通过结合其他模态的特征,在空间和通道维度上校正当前模态的特征。在特征融合模块(FFM)中,我们采用多头交叉注意力机制进行全局交互和融合不同模态的特征,从而能够全面利用多源遥感图像中的互补信息。最后,对比实验表明,所提出的 CFFormer 框架不仅达到了最先进的(SOTA)精度,而且与当前用于多源遥感图像语义分割的先进网络相比,还表现出出色的鲁棒性。
总结:本文更新其中的FeatureCorrection_s2c模块。
⭐⭐本文二创模块仅更新于付费群中,往期免费教程可看下方链接⭐⭐
YOLOv11及自研模型更新汇总(含免费教程)文章浏览阅读366次,点赞3次,收藏4次。群文件2024/11/08日更新。,群文件2024/11/08日更新。_yolo11部署自己的数据集https://xy2668825911.blog.csdn.net/article/details/143633356
二、二创融合模块
2.1 相关代码
# https://blog.csdn.net/StopAndGoyyy?spm=1011.2124.3001.5343
# https://ieeexplore.ieee.org/document/10786275
class ChannelWeights(nn.Module):def __init__(self, dim, reduction=1):super(ChannelWeights, self).__init__()self.dim = dimself.avg_pool = nn.AdaptiveAvgPool2d(1)self.max_pool = nn.AdaptiveMaxPool2d(1)self.mlp = nn.Sequential(nn.Linear(self.dim * 6, self.dim * 6 // reduction),nn.ReLU(inplace=True),nn.Linear(self.dim * 6 // reduction, self.dim * 2),nn.Sigmoid())def forward(self, x1, x2):B, _, H, W = x1.shapex = torch.cat((x1, x2), dim=1)avg = self.avg_pool(x).view(B, self.dim * 2)std = torch.std(x, dim=(2, 3), keepdim=True).view(B, self.dim * 2)max = self.max_pool(x).view(B, self.dim * 2)y = torch.cat((avg, std, max), dim=1) # B 6Cy = self.mlp(y).view(B, self.dim * 2, 1)channel_weights = y.reshape(B, 2, self.dim, 1, 1).permute(1, 0, 2, 3, 4) # 2 B C 1 1return channel_weightsclass SpatialWeights(nn.Module):def __init__(self, dim, reduction=1):super(SpatialWeights, self).__init__()self.dim = dimself.mlp = nn.Sequential(nn.Conv2d(self.dim * 2, self.dim // reduction, kernel_size=1),nn.ReLU(inplace=True),nn.Conv2d(self.dim // reduction, 2, kernel_size=1),nn.Sigmoid())def forward(self, x1, x2):B, _, H, W = x1.shapex = torch.cat((x1, x2), dim=1) # B 2C H Wspatial_weights = self.mlp(x).reshape(B, 2, 1, H, W).permute(1, 0, 2, 3, 4) # 2 B 1 H Wreturn spatial_weights# 先空间校正再通道校正
class FeatureCorrection_s2c(nn.Module):def __init__(self, dim, reduction=1, eps=1e-8):super(FeatureCorrection_s2c, self).__init__()# 自定义可训练权重参数self.weights = nn.Parameter(torch.ones(2, dtype=torch.float32), requires_grad=True)self.eps = epsself.spatial_weights = SpatialWeights(dim=dim, reduction=reduction)self.channel_weights = ChannelWeights(dim=dim, reduction=reduction)self.apply(self._init_weights)@classmethoddef _init_weights(cls, m):if isinstance(m, nn.Linear):trunc_normal_(m.weight, std=.02)if isinstance(m, nn.Linear) and m.bias is not None:nn.init.constant_(m.bias, 0)elif isinstance(m, nn.LayerNorm):nn.init.constant_(m.bias, 0)nn.init.constant_(m.weight, 1.0)elif isinstance(m, nn.Conv2d):fan_out = m.kernel_size[0] * m.kernel_size[1] * m.out_channelsfan_out //= m.groupsm.weight.data.normal_(0, math.sqrt(2.0 / fan_out))if m.bias is not None:m.bias.data.zero_()def forward(self, x):x1, x2 = xweights = nn.ReLU()(self.weights)fuse_weights = weights / (torch.sum(weights, dim=0) + self.eps)spatial_weights = self.spatial_weights(x1, x2)x1_1 = x1 + fuse_weights[0] * spatial_weights[1] * x2x2_1 = x2 + fuse_weights[0] * spatial_weights[0] * x1channel_weights = self.channel_weights(x1_1, x2_1)main_out = x1_1 + fuse_weights[1] * channel_weights[1] * x2_1aux_out = x2_1 + fuse_weights[1] * channel_weights[0] * x1_1return torch.cat([main_out, aux_out], dim=1)2.2更改yaml文件 (以自研模型为例)
yam文件解读:YOLO系列 “.yaml“文件解读_yolo yaml文件-CSDN博客
打开更改ultralytics/cfg/models/11路径下的YOLOv11.yaml文件,替换原有模块。

# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# ⭐⭐Powered by https://blog.csdn.net/StopAndGoyyy, 技术指导QQ:2668825911⭐⭐# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'# [depth, width, max_channels]n: [0.50, 0.25, 1024] # summary: 377 layers, 2,249,525 parameters, 2,249,509 gradients, 8.7 GFLOPs/258 layers, 2,219,405 parameters, 0 gradients, 8.5 GFLOPss: [0.50, 0.50, 1024] # summary: 377 layers, 8,082,389 parameters, 8,082,373 gradients, 29.8 GFLOPs/258 layers, 7,972,885 parameters, 0 gradients, 29.2 GFLOPsm: [0.50, 1.00, 512] # summary: 377 layers, 20,370,221 parameters, 20,370,205 gradients, 103.0 GFLOPs/258 layers, 20,153,773 parameters, 0 gradients, 101.2 GFLOPsl: [1.00, 1.00, 512] # summary: 521 layers, 23,648,717 parameters, 23,648,701 gradients, 124.5 GFLOPs/330 layers, 23,226,989 parameters, 0 gradients, 121.2 GFLOPsx: [1.00, 1.50, 512] # summary: 521 layers, 53,125,237 parameters, 53,125,221 gradients, 278.9 GFLOPs/330 layers, 52,191,589 parameters, 0 gradients, 272.1 GFLOPs# n: [0.33, 0.25, 1024]
# s: [0.50, 0.50, 1024]
# m: [0.67, 0.75, 768]
# l: [1.00, 1.00, 512]
# x: [1.00, 1.25, 512]
# YOLO11n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 2, RCRep2A, [128, False, 0.25]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 4, RCRep2A, [256, False, 0.25]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 4, RCRep2A, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 2, RCRep2A, [1024, True]]- [-1, 1, SPPF_WD, [1024, 7]] # 9# YOLO11n head
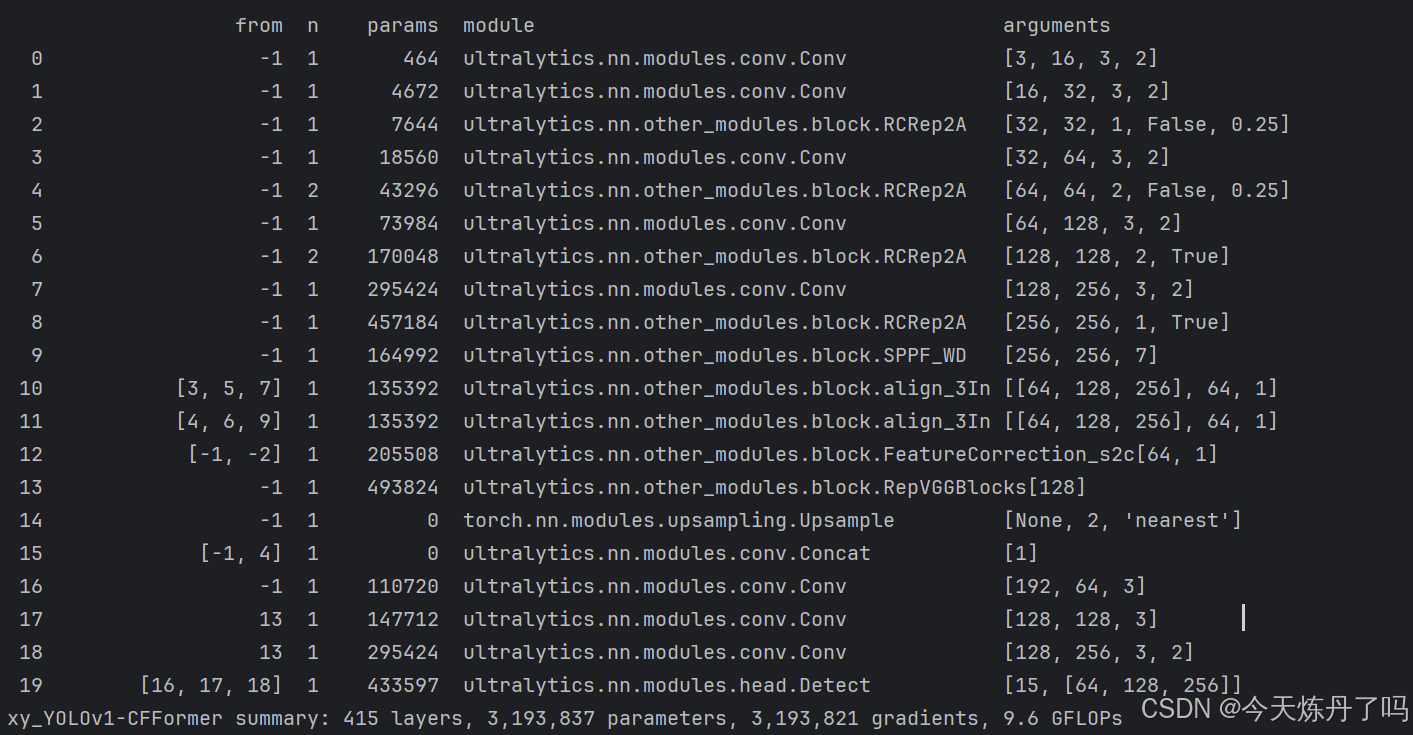
head:- [[3, 5, 7], 1, align_3In, [256, 1]] # 10- [[4, 6, 9], 1, align_3In, [256, 1]] # 11- [[-1, -2], 1, FeatureCorrection_s2c, [1]] #12 cat- [-1, 1, RepVGGBlocks, []] #13- [-1, 1, nn.Upsample, [None, 2, "nearest"]] #14- [[-1, 4], 1, Concat, [1]] #15 cat- [-1, 1, Conv, [256, 3]] # 16- [13, 1, Conv, [512, 3]] #17- [13, 1, Conv, [1024, 3, 2]] #18- [[16, 17, 18], 1, Detect, [nc]] # Detect(P3, P4, P5)# ⭐⭐Powered by https://blog.csdn.net/StopAndGoyyy, 技术指导QQ:2668825911⭐⭐
2.3 修改train.py文件
创建Train脚本用于训练。
from ultralytics.models import YOLO
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'TRUE'if __name__ == '__main__':model = YOLO(model='ultralytics/cfg/models/xy_YOLO/xy_yolov1.yaml')# model = YOLO(model='ultralytics/cfg/models/11/yolo11l.yaml')model.train(data='./datasets/data.yaml', epochs=1, batch=1, device='0', imgsz=320, workers=1, cache=False,amp=True, mosaic=False, project='run/train', name='exp',)
在train.py脚本中填入修改好的yaml路径,运行即可训练,数据集创建教程见下方链接。
YOLOv11入门到入土使用教程(含结构图)_yolov11使用教程-CSDN博客