【Linux应用】Ubuntu20.04 aarch64开发板一键安装ROS2(清华源)
【Linux应用】Ubuntu20.04 aarch64开发板一键安装ROS2(清华源)
文章目录
- 相关资料
- 更改UTF8
- 执行更新
- 一键安装ROS2
- 验证
- 配置环境变量
- 附录:开发板快速上手:镜像烧录、串口shell、外设挂载、WiFi配置、SSH连接、文件交互(RADXA ZERO 3为例)
- ZERO 3烧录
- ZERO 3串口shell
- 外设挂载
- 连接WiFi
- SSH连接
- SSH的文件交互
- 换源
相关资料
清华园地址
更改UTF8
locale # check for UTF-8sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8locale # verify setting
执行更新
获取密钥并更新
# 1. 使用清华镜像源下载密钥(避免GitHub连接)
sudo curl -sSL https://mirrors.tuna.tsinghua.edu.cn/ros/ros.key -o /tmp/ros.key# 2. 转换密钥格式并安装到安全位置
sudo gpg --dearmor /tmp/ros.key | sudo tee /usr/share/keyrings/ros-archive-keyring.gpg >/dev/null# 3. 添加清华镜像源(自动匹配系统版本)
sudo tee /etc/apt/sources.list.d/ros.list << EOF
deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu $(lsb_release -cs) main
EOF# 4. 清理临时文件
sudo rm /tmp/ros.key# 5. 更新软件源
sudo apt update
一键安装ROS2
sudo apt update
sudo apt upgrade
sudo apt-get update
sudo apt install ros-foxy-desktop


期间会让你选择某些依赖版本
按默认就行

验证
cat /opt/ros/foxy/setup.bash
source /opt/ros/foxy/setup.bash
ros2 run demo_nodes_cpp talker

配置环境变量
# 添加永久环境变量
# 1. 临时生效方式(每次新终端都需要执行)
source /opt/ros/foxy/setup.bash# 2. 永久生效配置(将以下命令加入 bashrc)
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc
source ~/.bashrc# 3. 安装演示包(如果未安装)
sudo apt install ros-foxy-demo-nodes-cpp# 4. 再次运行测试
ros2 run demo_nodes_cpp talker
附录:开发板快速上手:镜像烧录、串口shell、外设挂载、WiFi配置、SSH连接、文件交互(RADXA ZERO 3为例)
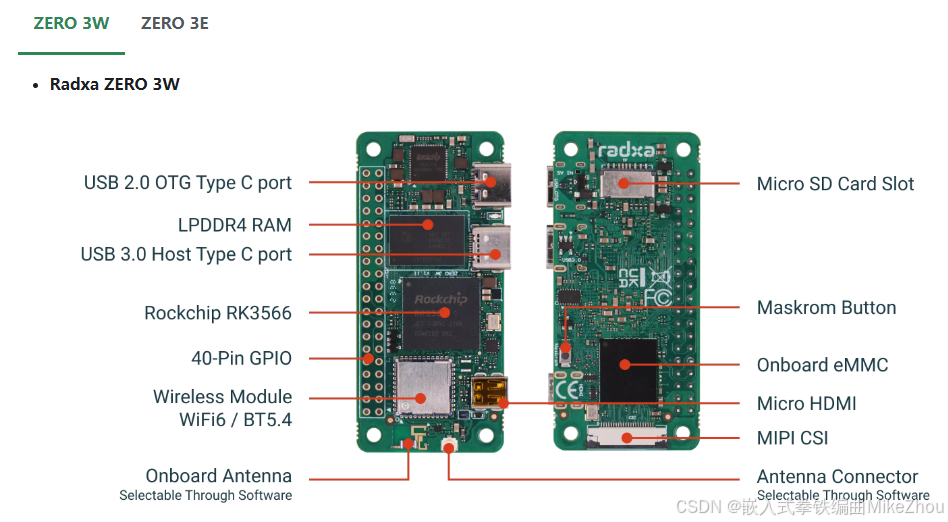
开发板快速上手:镜像烧录、串口shell、外设挂载、WiFi配置、SSH连接、文件交互(RADXA ZERO 3为例)
ZERO 3烧录
ZERO 3有两种 最本质的就是一个带WiFi一个不带WiFi
ZERO 3作为一个Linux板 其存储支持从sd卡EFI启动
系统安装则直接通过Balena Etcher来进行
可以使用其Windows版本即可
官方文档:
官方文档快速上手描述
镜像下载则也可以使用官方镜像:
Radxa ZERO 3 Debian Build 6
该镜像是最初的镜像 很多依赖都没有
如果开发的话 可以直接下载第三方镜像 或者自己在原有官方镜像上去安装镜像包等等
烧录很简单 直接用工具选择U盘 选择镜像即可
下图为烧录好了的sd卡
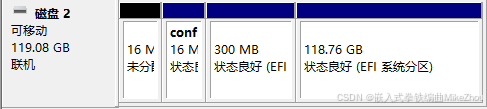
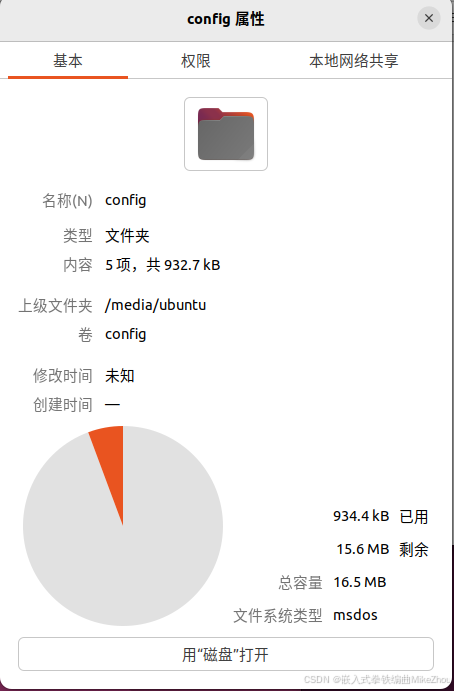
除了系统分区外 就是一个config分区 其挂载根根目录名称即为config
ZERO 3串口shell
串口与ZERO 3链接如下图:
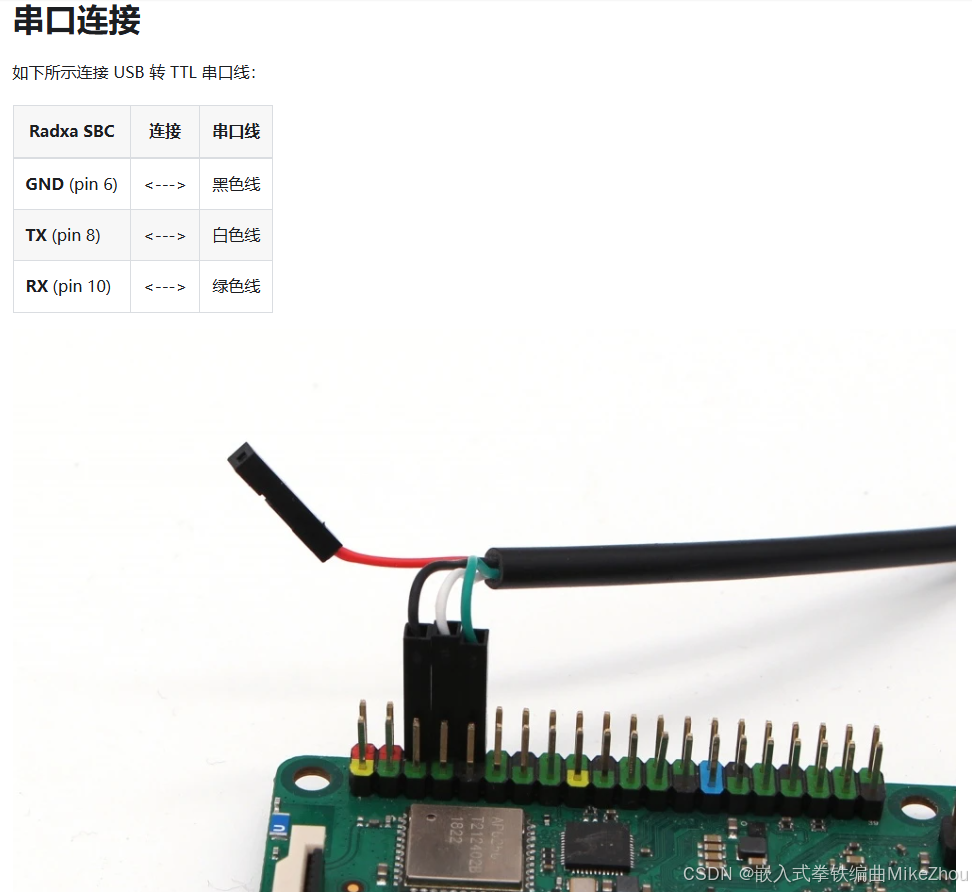
链接后 配置串口为
baudrate: 1500000
data bit: 8
stop bit: 1
parity : none
flow control: none
启动后 用户名和密码都为radxa
外设挂载
根据df命令查询系统挂载点
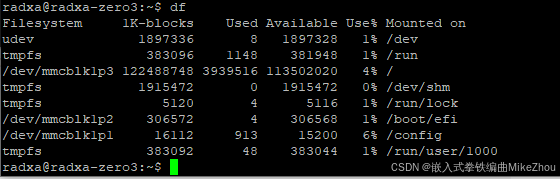
其做好了的U盘外部存储空间为/config

连接WiFi
使用如下指令链接WiFi:
nmcli device wifi #扫描WiFi
sudo nmcli device wifi connect <ssid> password <passwd> #连接WiFi

连上后 使用ip a命令即可查看连接状态和ip
SSH连接
使用命令sudo systemctl status ssh查看ssh状态
前提是要安装ssh
如果没有安装 则通过shell安装ssh:
sudo apt-get update
sudo apt-get install openssh-server openssh-sftp-server
根据Active判断是否需要重启ssh服务:
重启ssh服务:
sudo systemctl restart ssh
启动后如下:
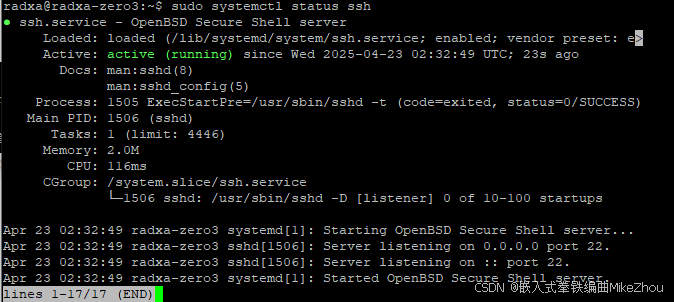
Active状态就被设置为了running
开机自启动ssh则使用命令:
sudo systemctl enable --now ssh
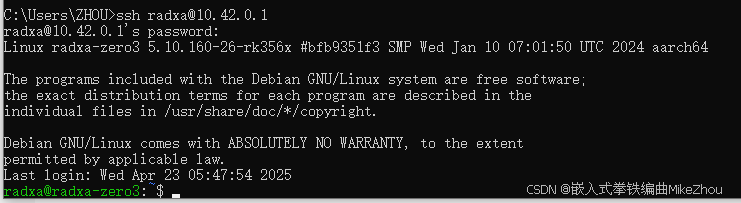
在PC上 支持ssh的设备中 使用以下指令链接到板子:
ssh [username]@[IP address] # or ssh [username]@[hostname]
如下图:
SSH的文件交互
若是在PC上作为主机去访问设备
那么就是在PC的cmd中运行shell
有的终端软件配备了ssh的文件管理传输功能
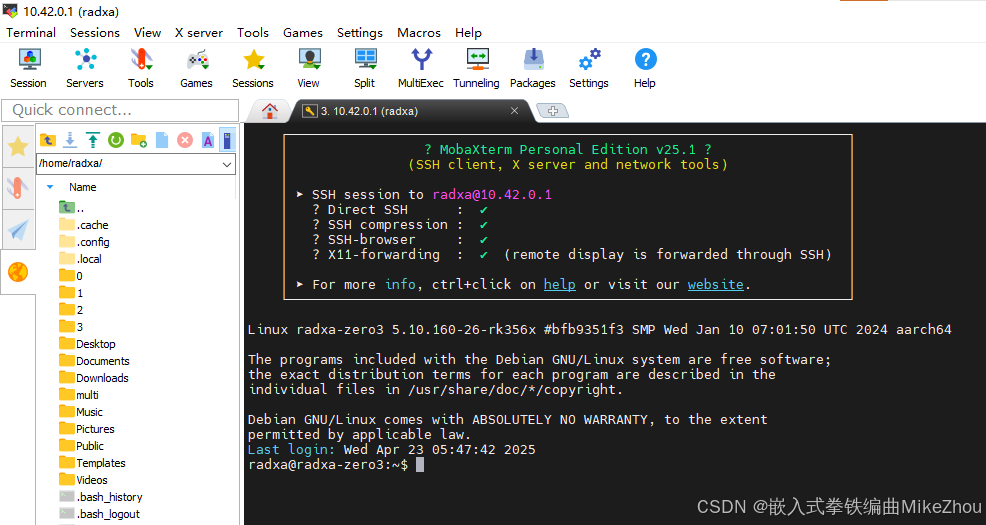
连上以后就可以直接搜素到当前目录下的各类文件 以便于实现文件管理
并且可以直接download
# 复制 Windows 文件到 Linux
scp D:\data\1.txt root@192.168.88.161:/root/data
# 复制 Windows 目录到 Linux(记得加 -r)
scp -r D:\data root@192.168.88.161:/root/data# 复制 Linux 文件到 Windows
scp root@192.168.88.161:/root/data/1.txt D:\data
# 复制 Linux 目录到 Windows(记得加 -r)
scp -r root@192.168.88.161:/root/data D:\data
前提是设备开启了ssh可以被链接
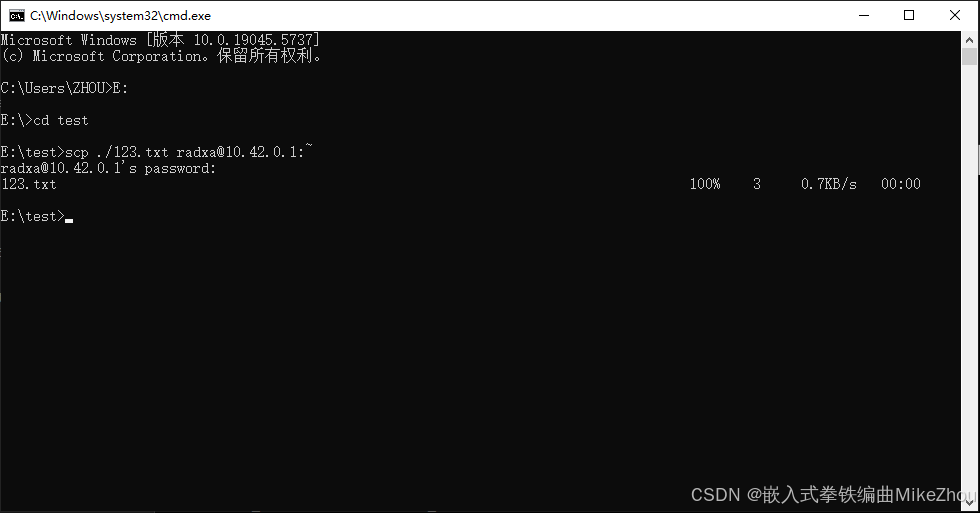
发过去后便能在板子上看到:
回传文件夹:

如果是Linux设备去连接Windows设备 则需要在Windows里面设置对应的服务 相关教程很多 这里不过多赘述
如果是Linux设备访问Linux设备 则主设备也要指定IP
scp root@192.168.88.161:/root/1.txt root@192.168.88.162:/root# 如果设置了Linux之间的免密登录,可这样写:
scp 192.168.88.161:///root/1.txt 192.168.88.162:///root
换源
Linux系统的源都在/etc/apt/下 一般有两个文件
一个是sources.list 另外一个是sources.list.d目录下的品牌list文件
如树莓派需要备份原本的源:
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
sudo cp /etc/apt/sources.list.d/raspi.list /etc/apt/sources.list.d/raspi.list.bak
而radxa的则是:
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
sudo cp /etc/apt/sources.list.d/radxa.list /etc/apt/sources.list.d/radxa.list.bak
将原本的文件进行编辑:
sudo nano /etc/apt/sources.list
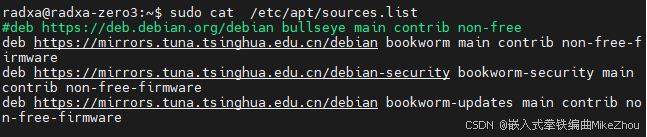
注释掉最初的源 并添加新的源:
deb https://mirrors.tuna.tsinghua.edu.cn/debian bookworm main contrib non-free-firmware
deb https://mirrors.tuna.tsinghua.edu.cn/debian-security bookworm-security main contrib non-free-firmware
deb https://mirrors.tuna.tsinghua.edu.cn/debian bookworm-updates main contrib non-free-firmware
如图:
然后再换子目录下的源
sudo nano /etc/apt/sources.list.d/raspi.list
替换成:
deb https://mirrors.tuna.tsinghua.edu.cn/raspberrypi/ bullseye main
不过很可惜 清华源没有radxa 但是可以换debian的源(/etc/apt/sources.list):
deb https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye main contrib non-free
deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye main contrib non-free
deb https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye-updates main contrib non-free
deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye-updates main contrib non-free
deb https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye-backports main contrib non-free
deb-src https://mirrors.tuna.tsinghua.edu.cn/debian/ bullseye-backports main contrib non-free
deb https://mirrors.tuna.tsinghua.edu.cn/debian-security bullseye-security main contrib non-free
deb-src https://mirrors.tuna.tsinghua.edu.cn/debian-security bullseye-security main contrib non-free
换源后 执行
sudo apt-get upgrade
sudo apt-get update