永磁同步电机控制算法-自适应带宽LADRC转速控制器
一、原理介绍
设计了自适应带宽 LADRC 控制方法,继承了 LADRC 优点的同时,加入自适应带宽控制,提出运用 Softsign 函数设计带宽自适应函数,根据电机转速自动调节控制带宽,解决了永磁同步电机在复杂且多变的环境下受到干扰并影响其转动性能的问题,使其控制性能得到进一步增强。
低速时由于系统鲁棒性较好,所以可以适当降低带宽来提高系统的稳定性,高速则需要提高带宽来增加系统鲁棒性。由此设计根据转子转速在线调整的自适应带宽函数。

Softsign函数与tanh和sigmoid函数相比具有更平坦且缓慢上升的曲线,Softsign 函数饱和速度较慢,且渐进线更为平缓,这可以在一定程度上缓解梯度消失的问题,提供更稳定的梯度信息,弱化转速大幅波动时所带来的影响。此外Softsign函数的计算只涉及简单的除法操作,而tanh和sigmoid函数涉及指数运算,这使得其在应用时更为高效且适用于小算力芯片,适应范围更加广泛。总的来说,Softsign函数在鲁棒性、计算效率以及梯度稳定性方面具有一定优势,尤其适合于需要处理较大范围输入值的应用场景。
同时将观测器增益与控制器带宽相关联,此时LESO便只需调节控制器带宽即可。
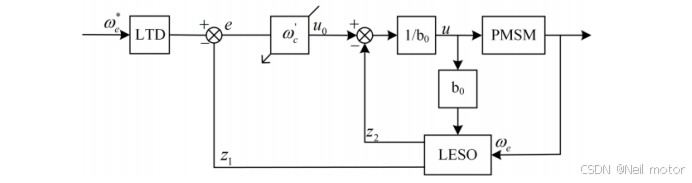
观测器增益ω0 决定了观测器的跟踪速度,ω0 越大,观测器估计精度越高,抗干扰能力越强,瞬态响应速度加快,过大则会引入高频噪声使系统不稳定;控制器带宽ωc 决定了控制器的响应速度,但是ωc 过大会导致系统超调甚至不稳定,还会引入更多噪声;扰动补偿b表示控制对象的特性,b越大,抗干扰能力越弱。
转速环 ALADRC 框图如图所示:
二、仿真验证
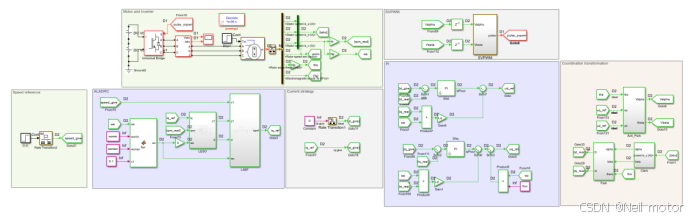
在MATLAB/simulink里面验证所提算法,采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
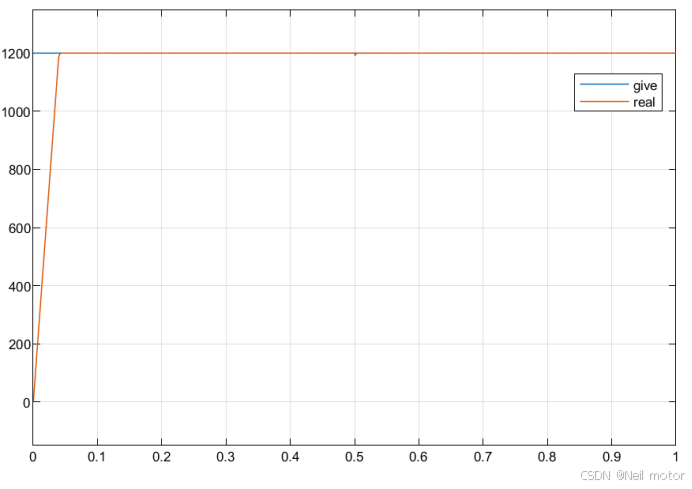
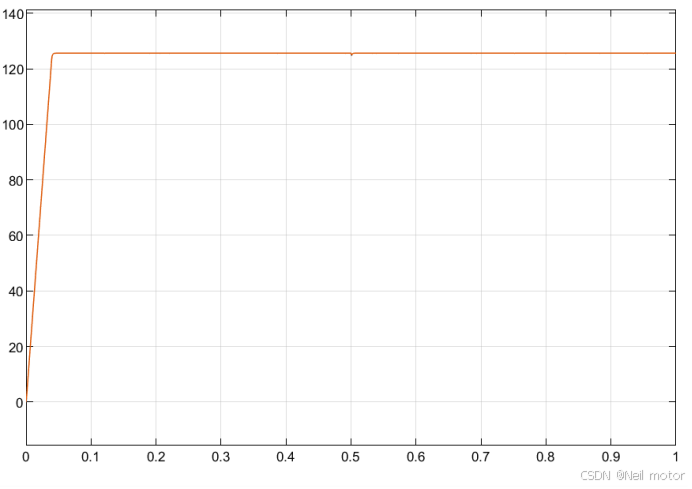
2.1转速
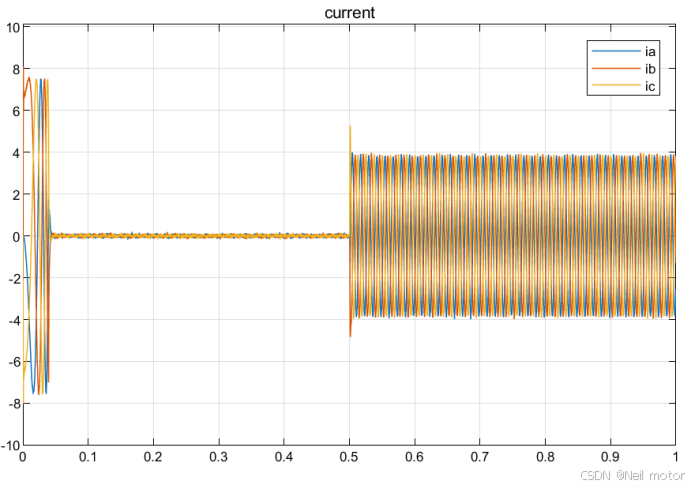
2.2三相电流
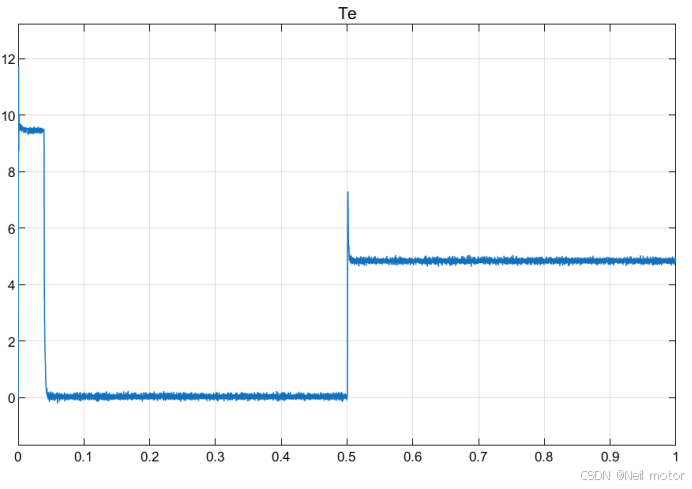
2.3电磁转矩
2.4ESO中转速的估计
仿真已发布在咸鱼,有需要可以看看,咸鱼搜索【Neilmotor】
感谢支持