初学stm32 --- PWM输出
目录
STM32 PWM工作过程编辑
STM32 PWM工作过程(通道1为例)
PWM模式1 & PWM模式2
向上计数配置说明编辑
STM32 定时器3输出通道引脚
自动重载的预装载寄存器
编辑
PWM输出相关库函数
输出比较初始化函数:
设置比较值函数:
使能输出比较预装载:
使能自动重装载的预装载寄存器允许位:
STM32 PWM工作过程

STM32 PWM工作过程(通道1为例)
- CCR1:捕获比较(值)寄存器(x=1,2,3,4):设置比较值。
- CCMR1: OC1M[2:0]位:
对于PWM方式下,用于设置PWM模式1【110】或者PWM模式2【111】
- CCER:CC1P位:输入/捕获1输出极性。0:高电平有效,1:低电平有效。
- CCER:CC1E位:输入/捕获1输出使能。0:关闭,1:打开。
PWM模式1 & PWM模式2
寄存器TIMx_CCMR1的OC1M[2:0]位来分析:

向上计数配置说明
这里的OCXREF是比较的结果,在PWM模式一下,向上计数,当计数值CNT<比较值CCR时,输出有效值。
这里的CCxIF是终端触发标志位。
STM32 定时器3输出通道引脚

自动重载的预装载寄存器
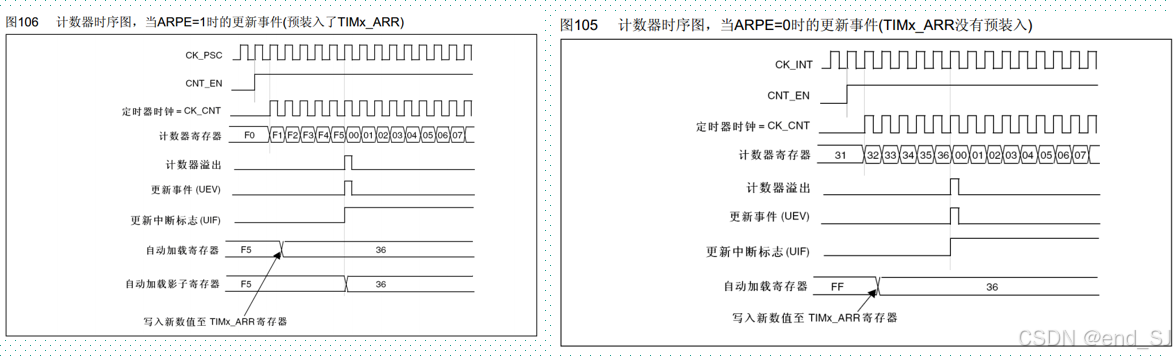
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
简单的说:
ARPE=1,ARR立即生效。原来本来是向上计数到36,然后溢出,再回到0。
如果计数中间修改了ARR的值,比如修改到了F5,那么再计数到F5时会立即溢出。
APRE=0,ARR下个比较周期生效。原来本来是向上计数到36,然后溢出,再回到0。
如果计数中间修改了ARR的值,比如修改到了FF,那么再计数到FF时不会溢出,他要到下个比较的周期,再到FF才会溢出。
PWM输出相关库函数
输出比较初始化函数:
void TIM_OCxInit(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);typedef struct
{uint16_t TIM_OCMode; //PWM模式1或者模式2uint16_t TIM_OutputState; //输出使能 OR失能uint16_t TIM_OutputNState;uint16_t TIM_Pulse; //比较值,写CCRxuint16_t TIM_OCPolarity; //比较输出极性uint16_t TIM_OCNPolarity; uint16_t TIM_OCIdleState; uint16_t TIM_OCNIdleState;
} TIM_OCInitTypeDef;
实例:
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure. TIM_Pulse=100;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
设置比较值函数:
void TIM_SetCompareX(TIM_TypeDef* TIMx, uint16_t Compare2);
使能输出比较预装载:
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);使能自动重装载的预装载寄存器允许位:
void TIM_ARRPreloadConfig(TIM_TypeDef* TIMx, FunctionalState NewState);
总结 ---PWM输出配置步骤:
① 使能定时器3和相关IO口时钟。
使能定时器3时钟:RCC_APB1PeriphClockCmd();
使能GPIOB时钟:RCC_APB2PeriphClockCmd();
② 初始化IO口为复用功能输出。函数:GPIO_Init();
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
③ 这里我们是要把PB5用作定时器的PWM输出引脚,所以要重映射配置,
所以需要开启AFIO时钟。同时设置重映射。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
④ 初始化定时器:ARR,PSC等:TIM_TimeBaseInit();
⑤ 初始化输出比较参数:TIM_OC2Init();
⑥ 使能预装载寄存器: TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
⑦ 使能定时器。TIM_Cmd();
⑧ 不断改变比较值CCRx,达到不同的占空比效果:TIM_SetCompare2();