【Point-LIO】基于Ubuntu20.04的ROS1平台的Point-LIO部署Mid-360激光雷达
0、前言
Mid360参数


1、代码拉取
2、代码编译运行
文件结构





编译流程:
1、先编译livox_ros_driver2


2、编译整个工程文件

3、运行launch文件(livox_ros_driver2)

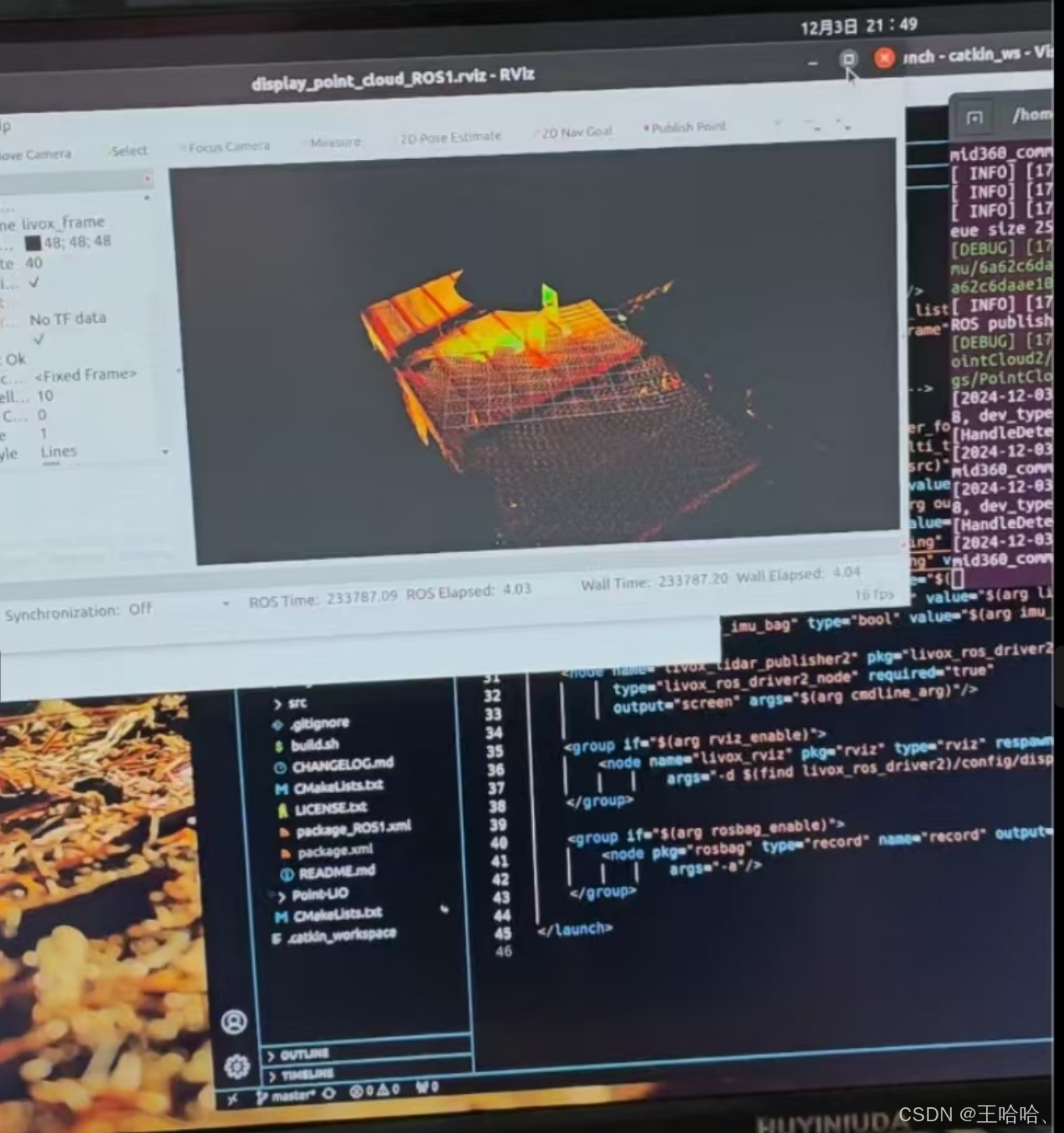
成功启动:

3、实物运行

看得出来,在rviz出了问题,没有点云数据。
第一步,搞定主机ip和雷达ip
利用我windows电脑的LivoxViewer查看雷达IP,
再用hostname -I指令在ubuntu查看主机ip,
参考readme文件,


输入指令:
roslaunch livox_ros_driver2 rviz_MID360.launch

虽然但是,rviz还是没有数据,

解决流程:
设置电脑的ip为固定IP,将其与激光雷达ip放在同一网段。
同一网段指的是计算机和雷达设备的 IP 地址应该处于同一个 子网 内。
比如,如果计算机的 IP 地址是 192.168.1.100,
那么雷达设备的 IP 地址应该是类似于 192.168.1.x(x 为任意数字,
范围通常是 1 到 254)这样的地址。
如果它们的 IP 地址不在同一个网段(即不在同一范围内),它们就无法互相通信。

在启动前先ping一下激光雷达和主机的ip:
如果有数据,说明,主机和激光雷达已经连接通。

启动SDK的launch文件:

然后便可得到以下效果: