文章目录
- 一、轨迹规划
- 1.1轨迹平滑与轮迹
- 1.2 目标距离
- 1.3 速度限制
- 1.4 候选速度的计算与调整
- 1.5 路径生成
- 二、双轮轨迹
- 2.1 计算梯度
- 2.2 计算偏移轨迹
- 2.3 返回结果
一、轨迹规划
1.1轨迹平滑与轮迹
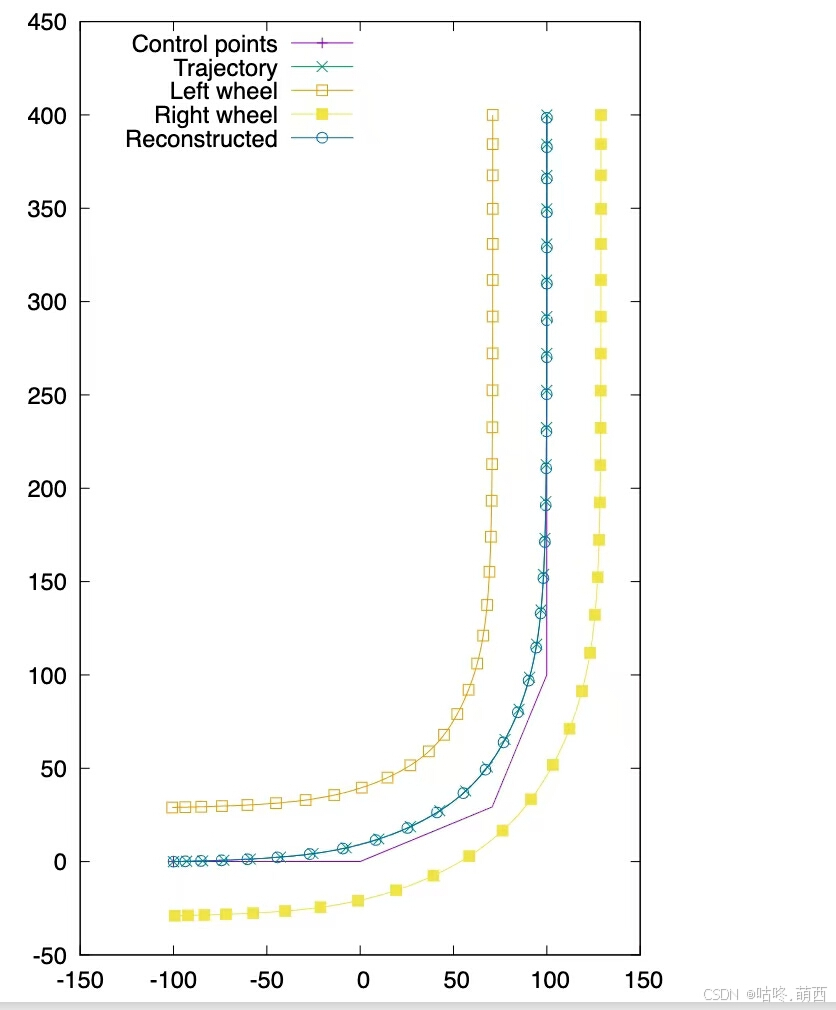
- 初始时,我们有一条由若干坐标点构成的机器人运行路径。通过对这些坐标点进行插值,我们可以得到一个更加平滑的轨迹,使得机器人在移动时能够更平稳地过渡。
- 接着,我们基于这条中心轨迹,计算出左轮和右轮的轨迹。这是通过向中心轨迹的左侧和右侧分别偏移一定宽度来实现的。
1.2 目标距离
- 对于中心轨迹以及左轮和右轮的轨迹,我们分别计算出每个点到终点的距离。这个距离是为了确保机器人在接近终点时能够逐渐减速并停下来。
- 同时,我们还计算出每个点到其下一个点的距离。这个距离将用于后续的速度计算。
1.3 速度限制
- 对于轨迹上的每个点,我们都根据当前速度、最大速度限制、最大加速度以及到下一个点和终点的距离,计算出三个速度限制:最大速度限制(max_v)、基于到下一个点距离的加速限制速度(max_v_acc)和基于到终点距离的减速限制速度(max_v_dec)。
- 注:相邻两个点之间计算max_v_acc时,以前一点的速度计算下一点能达到的最大速度 (v^2 = u^2 + 2ax)。
- 然后,我们选择这三个速度限制中的最小值作为该点的最大允许速度。
1.4 候选速度的计算与调整
- 在计算出中心轨迹上每个点的最大允许速度后,我们得到一个候选速度。这个速度是基于中心轨迹的当前速度、最大速度限制、最大加速度以及到下一个点和终点的距离来计算的。
- 接着,我们根据左轮和右轮轨迹上对应点的距离比例,将候选速度分配到左轮和右轮上,得到左轮和右轮的候选速度。
- 如果左轮或右轮的候选速度超过了它们各自的最大允许速度,我们就需要对候选速度进行调整。调整的原则是:确保左轮和右轮的速度都不会超过它们的最大允许速度,并且尽量保持中心轨迹的速度不变。
- 调整后的候选速度被用作当前点的实际速度,并更新到结果路径中。
1.5 路径生成
- 经过上述计算,我们得到了一个包含每个点速度和位置的结果路径。这个路径考虑了机器人的最大速度限制、最大加速度以及左轮和右轮的速度限制。
- 最后,我们在结果路径的末尾添加了一个速度为0的点,表示机器人已经完全停止。
二、双轮轨迹
2.1 计算梯度
- 首先遍历中心轨迹上的每个点(除了最后一个点),计算相邻两点之间的差值(即位移向量)。
- 使用atan2函数,根据位移向量的y分量和x分量计算出每段轨迹的倾斜角度(即梯度)。这个角度表示了轨迹在该点的切线方向。
- 为了确保最后一段轨迹也有一个梯度值,将最后一个计算出的梯度值复制到梯度数组的末尾。
2.2 计算偏移轨迹
- 接着创建一个新的路径(即偏移轨迹),这个路径将包含与中心轨迹相同数量的点。
- 对于中心轨迹上的每个点,根据该点的梯度值和给定的偏移量(offset),计算出偏移轨迹上对应点的坐标。这个计算过程考虑了是计算左轮轨迹还是右轮轨迹(通过left参数来控制)。
- 如果是计算左轮轨迹,会给梯度值加上90度(即M_PI / 2.0),这样计算出的偏移点就会位于中心点的左侧。
- 如果是计算右轮轨迹,会给梯度值减去90度(即-M_PI / 2.0),这样计算出的偏移点就会位于中心点的右侧。
- 使用三角函数(cos和sin)和偏移量,计算出偏移轨迹上每个点的x坐标和y坐标。
- 最后,将计算出的偏移点添加到偏移轨迹中。
2.3 返回结果
- 返回计算出的偏移轨迹,这个轨迹是一系列坐标点构成的路径,表示了左轮或右轮的行驶轨迹。