【01 DualCam Porting】
1、配置camera_custom_stero_setting.h
a、增加sensor配置
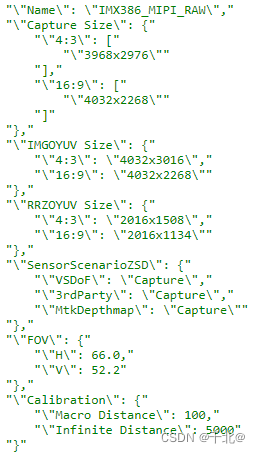
/vendor/mediatek/proprietary/custom/mt6765/hal/camera/camera_custom_stereo_setting.h
注意:
1)IMGOYUV Size:在有FOV crop的情况下,不能配置为sensor full size,建议比full size 小或者配置为fov crop的值。
vsdof 拍照log中搜索FOV Crop:找到经过FOV crop之后的值,比如此case为(3508x2632),如果找不到此Fov crop的log,则可以先配置为full size。
D MtkCam/CapturePipe/P2ANode: [onRequestProcess]VSDOF Sensor(0) FOV Crop(246,184)(3508x2632) TYPE Id(man_full_yuv)
抓log之前先输入:
adb shell setprop persist.vendor.mtk.camera.log_level 3adb shell pkill camera*
2) RRZOYUV size: 一般配置跟预览size 相等或者稍大,如果IMGO YUV size的二分之1比预览size大的话,也可以配置为IMGO YUV siz