相机光学(二十四)——CRA角度
CRA角度
- 0.参考资料
- 1.什么是CRA角度
- 2.为什么 CRA 会导致luma shading
- 3.为什么 CRA 会导致color shading
- 4.CRA相差过大的具体表现
- 5.CRA Matching
- 6.怎样选择sensor的CRA
0.参考资料
1.芯片CRA角度与镜头的匹配关系(一)
2.芯片CRA角度与镜头选型的匹配关系(二)
3.镜头与 SENSOR的主光线角度(CRA)不匹配对图像质量的影响
4.转:什么是 CRA ?
5.【笔记】CRA
1.什么是CRA角度
CRA 是 Chief Ray Angle 的缩写,意思是主光角。镜头的传感器一侧,可以聚焦到像素上的光线的最大角度被定义为一个参数,称为主光角(CRA)。此角度处的像素响应降低为零度角像素响应(此时,此像素是垂直于光线的)的 80%。
我们在挑选镜头时会有一个 CRA 的参数,在选择 sensor 时同样有一个 CRA 的参数 (sensor 像素点上有个微透镜,这也是为什么有sensor CRA的原因),选型时镜头和 sensor 的 CRA 参数要尽可能接近(一般不超过 3度)。否则当 lens CRA 大于 Sensor CRA 会出现明显的 color shading,当 lens CAR 小于 Sensor CRA 会出现 luma shading,建议是选择 lens CRA 小于 sensor CRA 的配置,因为luma shading 较 color shading 后端 ISP 更容易处理一些的。
2.为什么 CRA 会导致luma shading
当 lens CRA 小于 sensor CRA 时,从定义来理解就是,光线从镜头入射到像素上的最大光线角度,要比光线经过 sensor micro lens入射到像素上的最大光线角度要小,但成像光路是 镜头 —> sensor micro lens —>像素,所以当满足镜头 CRA 入射的光线(也就是光线入射角度的范围是0-CRA,此时是最大的入射光线角度),经过 sensor micro lens 时,micro lens 的 CRA 要更大,这就导致sensor 边缘的像素受光损失,就会出现暗角。
Luma Shading产生原因有两个:镜头能量衰减 、 Sensor CRA > Lens CRA
- 原因一:镜头能量衰减.
蓝色和绿色用相同的数量线条表示能量,中心位置的蓝色几乎所有能量都能达到最右侧的的成像单元,但是边缘的绿色由于有一定角度射入,经过镜头的折射,有一部分光(最上方的几条绿色线条)达到不了Pixel,因此成像单元中心的能量就会比边缘的大,表现为亮度向边缘衰减变暗。通常镜头的衰减符合: f(θ)=cos4(θ)。θ表示的是入射光线和法线的夹角。 - 原因二:Sensor CRA > Lens CRA
当Sensor CRA > Lens CRA时,光线从Micro Lens到感光区的最大光线角度 > 光线镜头入射到Pixel的最大光线角度,成像光路:Lens —> sensor Micro Lens —> Pixel,当满足Lens CRA入射光线经过sensor Micro Lens时,Micro Lens CRA更大,导致sensor边缘的Pixel接收到的光线能量损失,表现为图像四周出现暗角。
3.为什么 CRA 会导致color shading
产生原因为:Lens CRA > Sensor CRA
当光线从Lens经过并且入射到Micro Lens中,由于Lens CRA大于Micro Lens,会导致原本经过R-Filter的光线进入了G-Filter下方的Pixel中,造成Pixel的空间串扰,并出现Color Shading
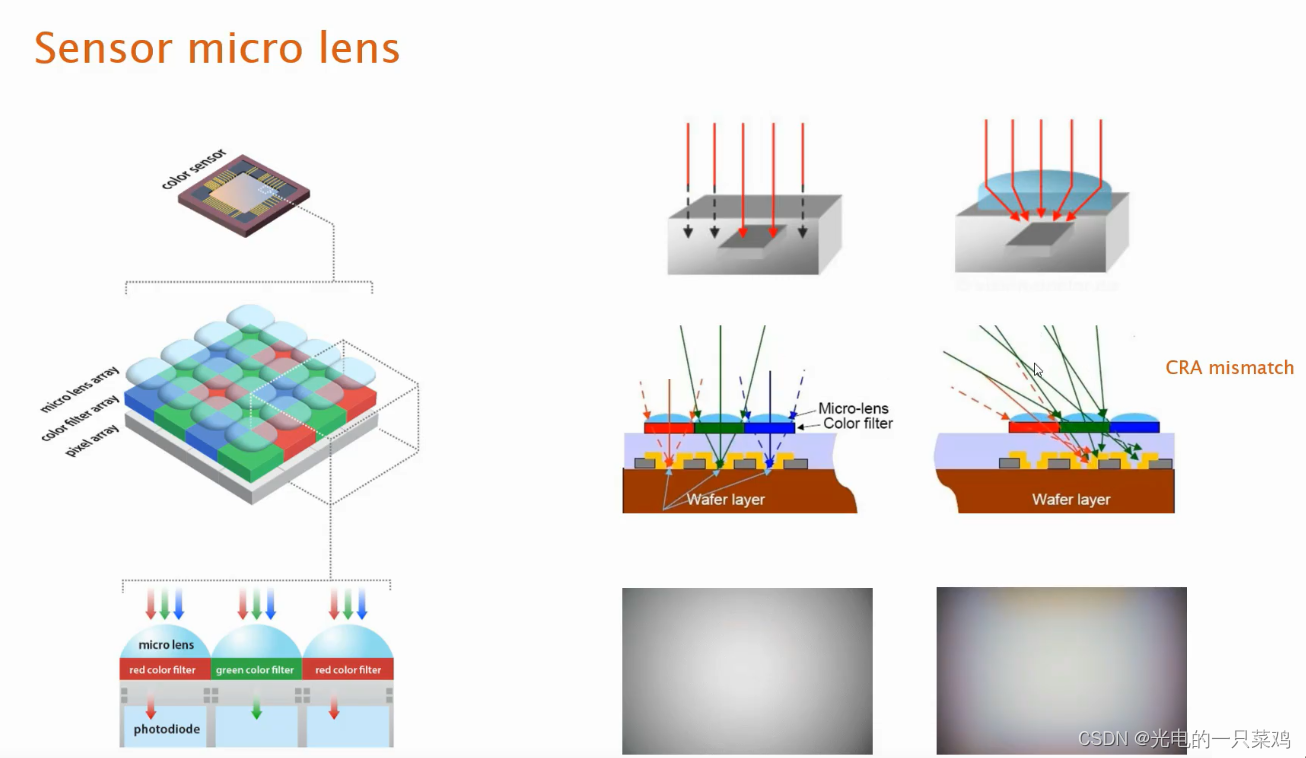
如上图是 sensor 的内部结构,sensor 上 micro lens 的作用就是聚焦光线,把入射光线引入到正确的像素点上(可以看到当没有 micro lens 时光线垂直入射,边缘的光线是照射不到像素上的),当入射光线的CRA角度超过sensor 的CRA时,就会导致经过R-filter的光线,照到了G像素上,造成像素之前的串扰,出现color shading;
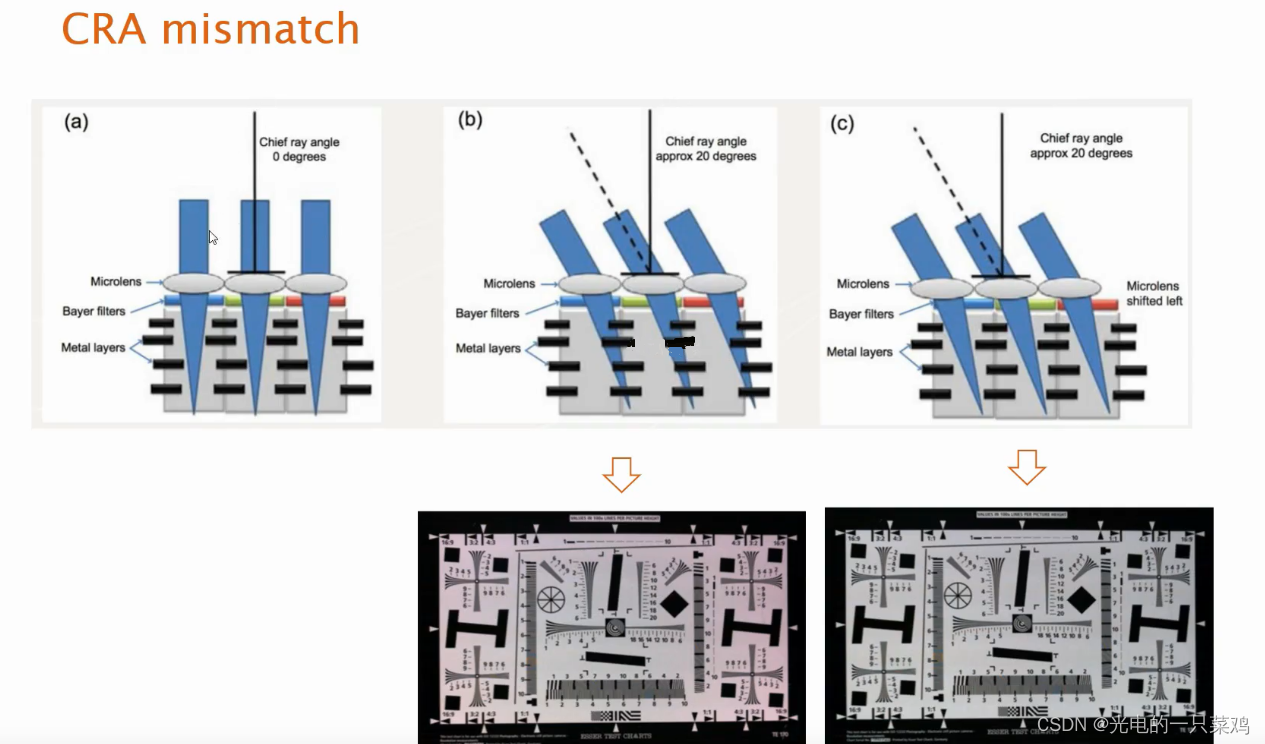
如上图所示,当光线垂直入射(也就是CRA为0时),光线可以正确的入射到像素上,但 Lens 的 CRA 很难是 0,视场范围越大的镜头,其 CRA 值就越大,sensor 上的微镜头要与镜头做匹配,其实就是通过移动微镜头将大角度的入射光线引导到正确的像素上,才能保证图像正常(如图c所示)。所以 sensor micro lens 能纠正的最大光路角度就是sensor CRA,但当 lens CRA 大于 sensor CRA 时,则 sensor 就无法通过位移 micro lens,矫正全部的大角度入射光线到正确的像素,就会导致 color shading 的出现 。
4.CRA相差过大的具体表现
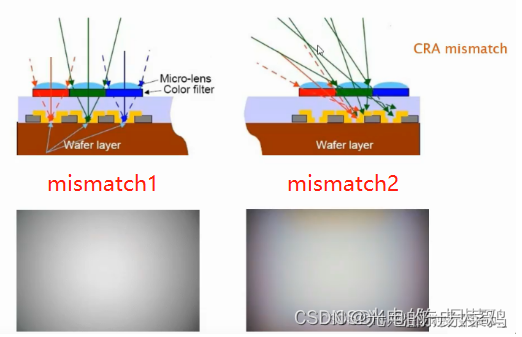
镜头的CRA与Image sensor的CRA相差过大会出现如下图偏色。
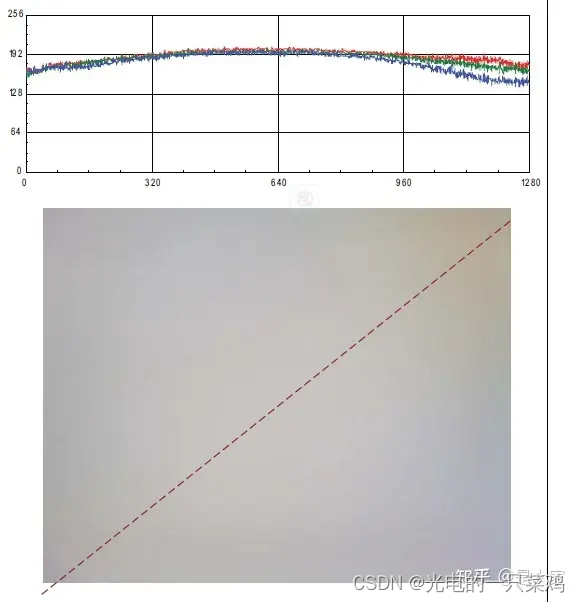
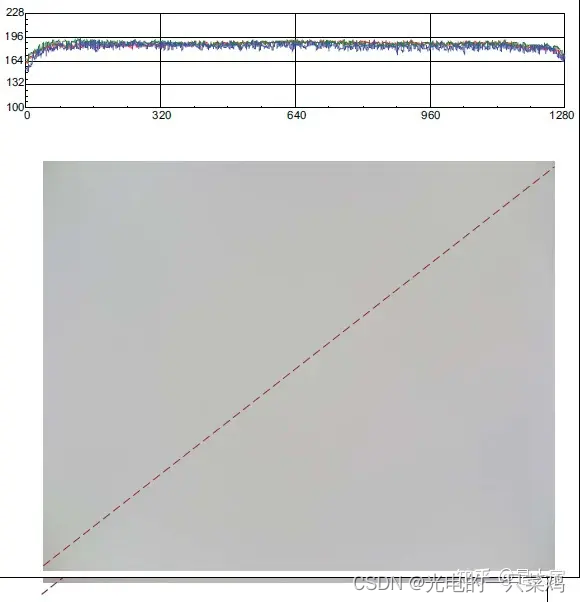
镜头的CRA与Image sensor的CRA匹配则图像正常,如下图:
5.CRA Matching
在光学系统中,sensor上的光学接收效率不仅与CRA有关,还与Sensor的Micro lens开口布局有关。因此在做Lens涉及时,CRA要尽量符合Sensor厂家提供的CRA参考值,提高功能接收效率。
通常Lens CRA要小于sensor的CRA,允许有3°以内的偏差。这是因为:
- 镜头CRA太过小于Sensor的CRA时,会出现四角偏暗(受光不足),光线无法到达sensor边缘,即Lens Shading;
- 镜头CRA太过大于Sensor的CRA时,光线会折射到临近的pixel上,导致pixel间出现串扰,即Color
shading,且在图像四周表现更明显; 建议优先保证Color Shading, 因为Lens Shading比Color
Shading容易调试;
不匹配导致整个图像的颜色不平衡产生串扰,从而导致信噪比(SNR)的降低;因为CCM需要增加数字增益来补偿光电二极管中的信号损失。

6.怎样选择sensor的CRA
- 广角镜头:这时一般lens的CRA比较大,需要选择CRA大于25度的sensor或者BSI的Sensor;一般用于手机、安防、玩具、网络摄像头等;
- 超长焦镜头:这时一般lens的CRA比较小,需要选择CRA为0度的sensor;一般用于安防、机器视觉等。
- 变焦镜头:这时Lens的CRA是变化的,一般需要根据实际应用选择,最好采用大Pixel,BSI的sensor;一般用于安防等。