【3】系统标定
文章目录
- 雷达标定
- 相机主雷达标定
- 底盘动力学标定
- 车辆循迹验证
- 建图
雷达标定
主要是为了获得到lidar到imu的tf关系。imu为父坐标lidar为子坐标。其他雷达标定到主lidar坐标系下。
标定的结果都是生成一个是四元数。
安装pclview
sudo apt-get install pcl-tools
pcl_viewer xxx.pcd查看标定后结果好坏标准: 点云文件中周围障碍物清晰、锐利,边缘整齐表示标定结果准确,否则请重新标定。
相机主雷达标定
底盘动力学标定
车辆动力学标定
车辆循迹验证
车辆循迹演示
在配置好标定表后,可以进行纯RTK定位下的车辆循迹;通过对直线和弯道的测试用来检测地盘动力学标定效果以及底盘控制模块是否存在问题.
检查GPS信号
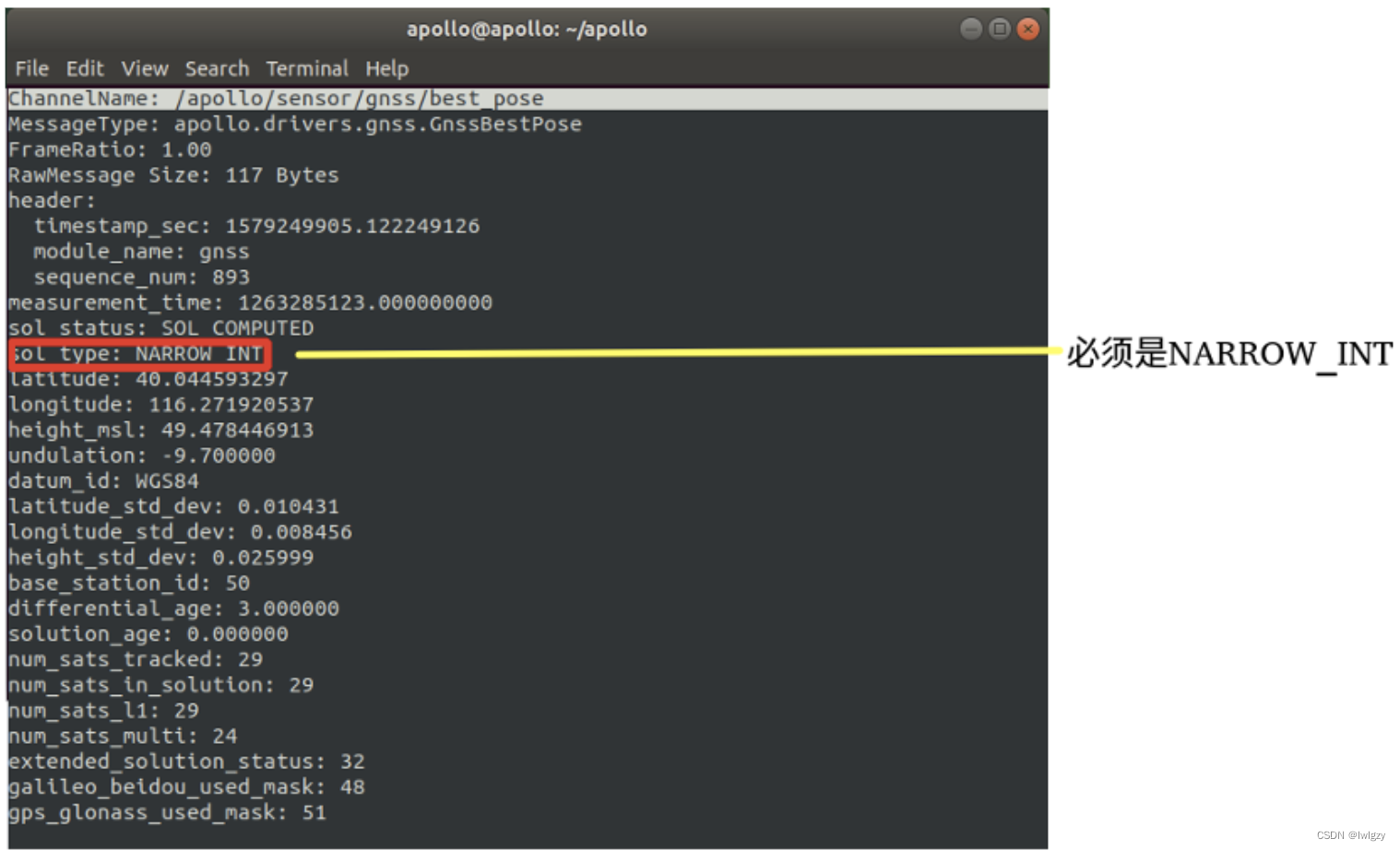
查看话题数据/apollo/sensor/gnss/best_pose 查看 sol_type 项是否是 NARROW_INT,若为 NARROW_INT,则表示 GPS 信号良好,符合定位要求;若不为 NARROW_INT,则遥控移动下车辆,直到出现 NARROW_INT 为止。
- 单独的RTK方式进行定位。
- 车辆在循迹自动驾驶时,并没有使用到感知相关的传感器,遇到障碍物不会刹停或者避让,遇到紧急情况请及时遥控器接管。
- 车辆可能开始起步比较猛,请用遥控器随时接管,紧急情况下,快速按下急停按钮。
检查定位信号
进入 /apollo/localization/pose channel,查看是否有数据刷新.
建图
建图不依赖动力学标定,只要雷达传感器标定好后可以进行。
DreamView启动后界面对应启动的launch或者dag文件可在此路径查找
/apollo/modules/dreamview_plus/conf/hmi_modes