车辆数据的提取、定位和融合(其一 共十二篇)
第一篇: System Introduction
第二篇:State of the Art
第三篇:localization
第四篇:Submapping and temporal weighting
第五篇:Mapping of Point-shaped landmark data
第六篇:Clustering of landmark data
第七篇:fusion of point-shaped landmark data
第八篇:fusion of complex landmark data
第九篇:fusion of areal data
第十篇:instaniation at the vehicle and backend sid
第十一篇:future work
第十二篇:Mathematical Nomenclature
序言
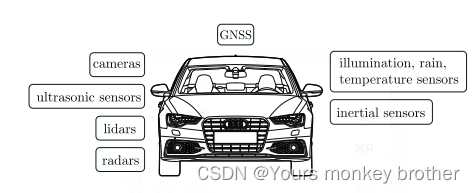
对于自动驾驶汽车和下一代驾驶辅助系统来说,代表道路网络详细特征的地图变得越来越重要。由知名地图提供商专门配备的车辆绘制道路网络地图,通常会导致地图每季度更新一次,这可能会导致自动驾驶汽车在道路信息过时的情况下遇到问题。此外,提供的地图可能缺乏细节,例如精确的地标几何形状或已知表现出快速时间衰减率的数据,但这些细节可能具有高度相关性,例如摩擦数据。作为替代方案,普通车辆可以获取有关道路网络的大量信息,这些车辆现在通常配备多种类型的传感器。随后,这种类型的收集数据称为 CVD1 。地图创建过程首先需要在车辆侧提取相关传感器数据并对其进行准确定位。不幸的是,传感器数据通常受到测量不确定度和误差的影响。通过适当的传感器数据融合,可以最大限度地减少两者。这项工作旨在全面了解三阶段管道,包括 CVD 的提取、定位和融合,旨在从普通车队获得的集体传感器测量中得出大规模、高精度、实时地图。假设车队仅配备商业上可行的传感器。关于后端的处理,严格倾向于以直接方式适用于新型传感器数据的通用方法。为此,引入了一种新的CVD区分为区域、点形地标和复杂地标数据。这样,不同类型的环境属性之间的相似性以一种总体上非常有益的方式得到利用;所提出的算法可以通过适当调整其参数化来适应属于这些类别的新型数据。
概述
为了实现上述目标,建议采用研究缺乏既定方法的新方法,以及对现有方法的相关扩展/调整,以满足非常具体的汽车要求。简要总结一下,本论文涉及的主要方面是通过在后端利用GNSS2后处理实现精确的车辆定位,这既可以显着提高定位精度,又适用于CVD的用例。
全局子映射的扩展,称为自适应分区,它允许以自适应、一致和资源高效的方式将大规模问题细分为小块,这是一种以自适应方式确定时间权重的新方法,它允许通过预聚合以高效的方式适当地推导出地标和局部特定的时间衰减率, 一种基于 JCBB3 数据关联的高效、多假设聚类,它涉及 i. a. 一种新颖的多标准成本函数,允许从主要指数搜索空间中以目标为导向地选择最可能的假设, 一种同时融合可能仅部分观察到的复杂和非复杂地标观测值的新方法,这些观测值允许表现出紧密的属性相互依赖性, 因此,以一种新颖的参数描述的形式提供,即所谓的 ADG4 ,这是一种新颖的、双阶段的区域数据融合方法,它既可扩展又可增量计算,并在批量插入或更新的情况下利用 FGT5 将计算效率提高多达 10 倍,– 一种新颖的, 在车辆和后端对建议的方法进行高度灵活和模块化的实例化,以及一种新颖、高度灵活和高效的数据存储,它利用分层级联模板,此外,可以被认为是定义广义处理函数的基石。
言必
总而言之,浓缩了一项广泛而多方面的研究,涉及基于普通车辆获取的预处理传感器测量值(即所谓的CVD)的大规模和高精度地图数据的推导。重点是利用商业上可行的传感器。此外,除了广阔的视角外,本论文还强调了高度相关的细节,例如后端传感器数据的高效、自适应时间加权和基于模板的分层数据存储。完整的流水线,包括介绍和评估了 CVD 的提取、定位和融合,因为已知每个组件都对推导的地图数据的质量有直接影响。融合区域和点形/复杂地标数据的方法要么从头开始发明,要么根据最新技术进行显着增强,始终牢记汽车环境的高度特定需求。