03.VisionMaster 机器视觉 位置修正 工具
VisionMaster 机器视觉 位置修正 工具
官方解释:位置修正是一个辅助定位、修正目标运动偏移、辅助精准定位的工具。可以根据模板匹配结果中的匹配点和匹配框角度建立位置偏移的基准,然后再根据特征匹配结果中的运行点和基准点的相对位置偏移实现ROI检测框的坐标旋转偏移,也就是让ROI区域能够跟上图像角度和像素的变化
如下图所示。

我这里的基准点和运行点是同一个点。所以在图上只看到一个点。下面我隐藏掉一个再看看。

上图现在显示 是基准点。绿色显示。
基准点、基准框是创建基准时的特征匹配的匹配点、匹配框。
运行点、运行框是目标图像特征匹配时的匹配点、匹配框。
根据基准点与运行点可以确定图像的像素偏移,根据基准框与匹配框可以确定角度偏移,就能让ROI区域能够跟上图像角度和像素的变化。
位置修正有两种方式,分别是按点修正与按坐标修正,按点修正,点的位置已经确定;按坐标则是用x,V来确定点的位置。需要注意的是不论是点还是坐标,,它的位置信息都是从上一个模块传输过来的,它通过一组对比图展示位置修正的作用
位置修正的使用示意图如下图所示。
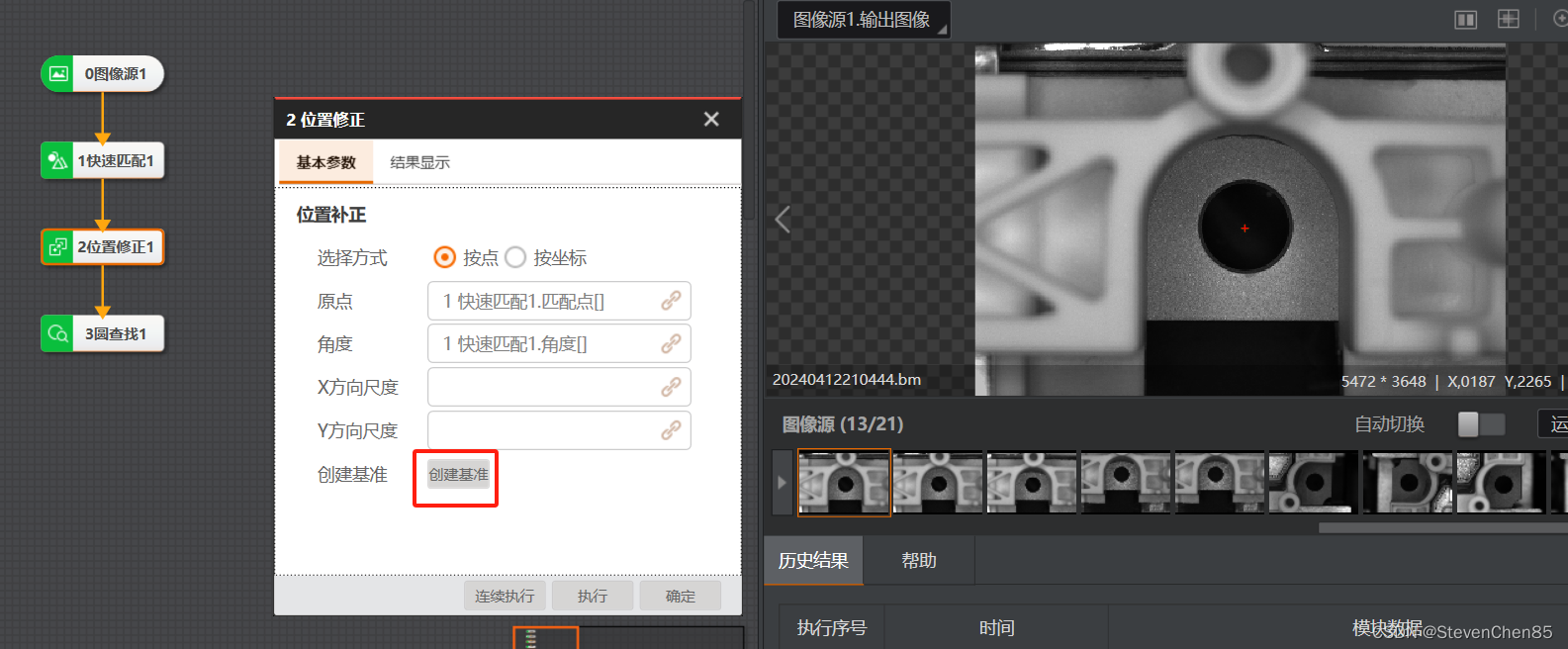
如上图。位置修正 是配合各种匹配工具使用的为下一步骤进行ROI位置修正使用的。主要要让下面步骤的ROI区域进行跟随的辅助定位工具。
使用也很简单拉出来后打开参数设置界面一般是使用默认参数就可以了。最后点一下【创建基准】按钮是可以了。也可以按钮坐标。两个原理上是差不多的。点执行可以看到效果。【确定】保存。
栏目推荐:
01.VisionMaster 机器视觉 本地图像导入及参数设置-CSDN博客
02.VisionMaster 机器视觉快速匹配模块-CSDN博客
03.VisionMaster 机器视觉 位置修正 工具-CSDN博客
04.VisionMaster 机器视觉找圆工具-CSDN博客
05.VisionMaster 机器视觉 结果 格式化输出-CSDN博客