算法-卡尔曼滤波之卡尔曼滤波的第二个方程:预测方程(状态外推方程)
在上一节中,使用了静态模型,我们推导出了卡尔曼滤波的状态更新方程,但是在实际情况下,系统都是动态,预测阶段,前后时刻的状态是改变的,此时我们引入预测方程,也叫状态外推方程;
同样的我们通过一个例子来分析,在开始为什么要选择卡尔曼滤波时,提出了一个例子;
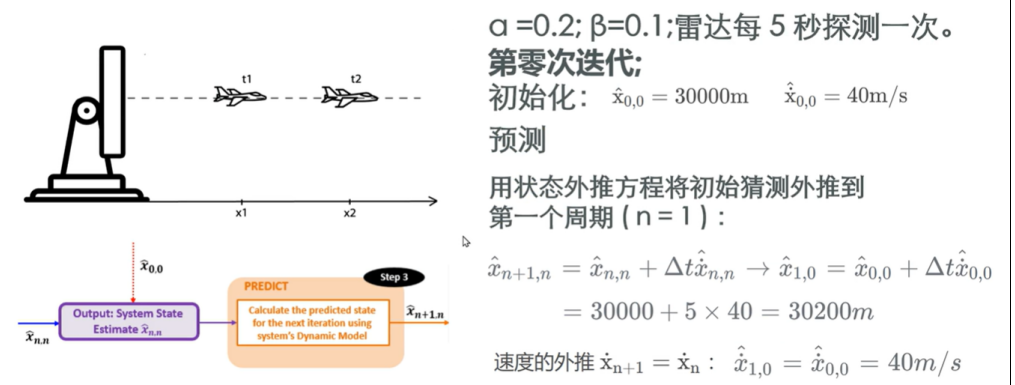
在一维空间内使用雷达来追踪匀速飞行的飞行器,此时系统状态为飞行器的航程,速度是相对于时间的变化率,也就是距离的导数;
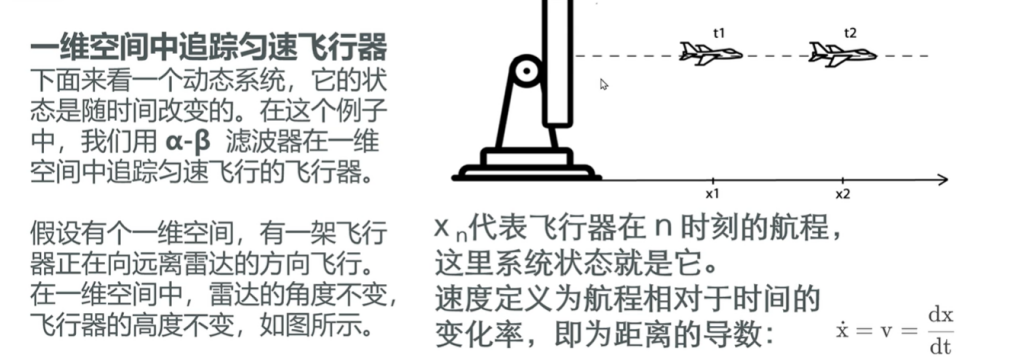
通过分析飞行器的一维物理模型,可以得到,速度恒定时,航程等于当前时刻的的航程加上时间变化*速度(距离的导数) ;
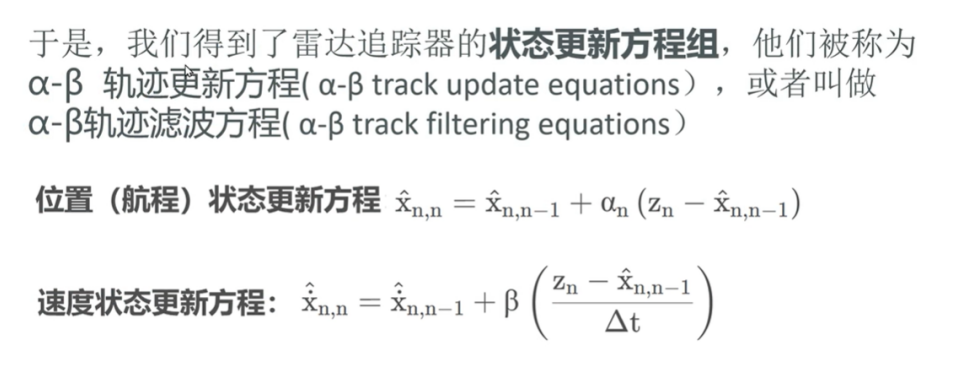
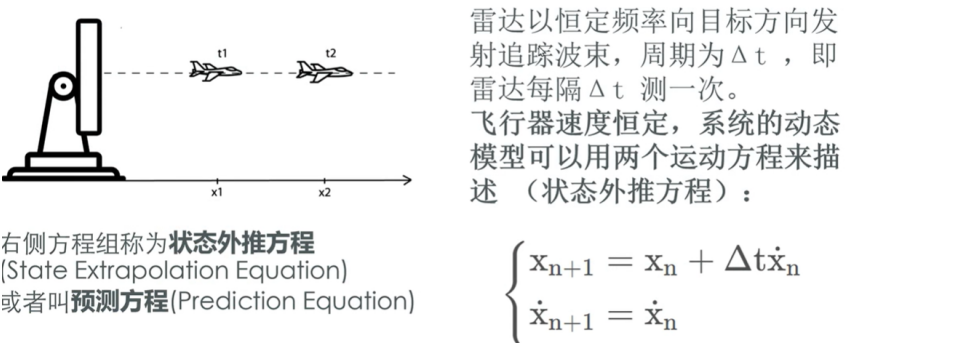 得到的动态模型,我们称为状态外推方程或者预测方程;
得到的动态模型,我们称为状态外推方程或者预测方程;
具体化这个例子:
 对于存在问题,我们分析得到两种情况:一个是雷达的误差,另外就是飞行器速度改变了;
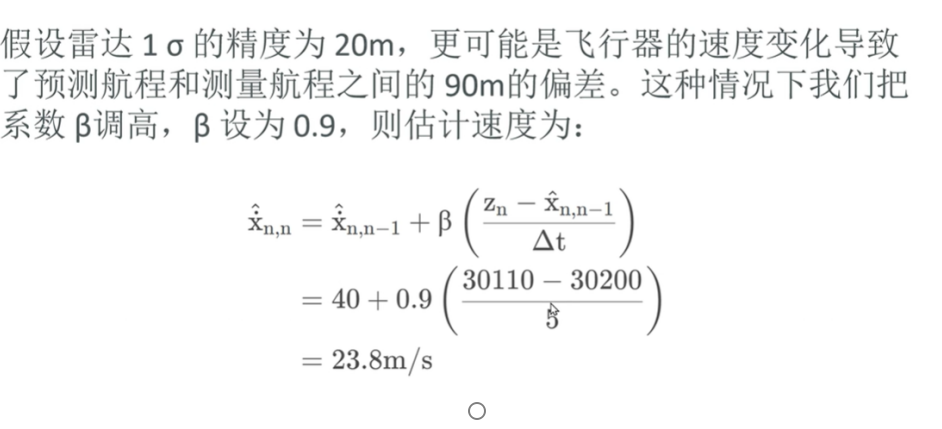
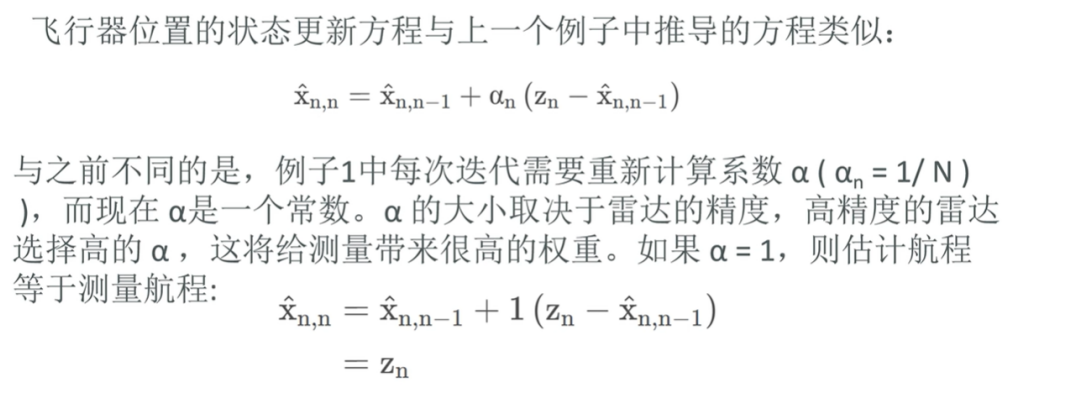
对于存在问题,我们分析得到两种情况:一个是雷达的误差,另外就是飞行器速度改变了;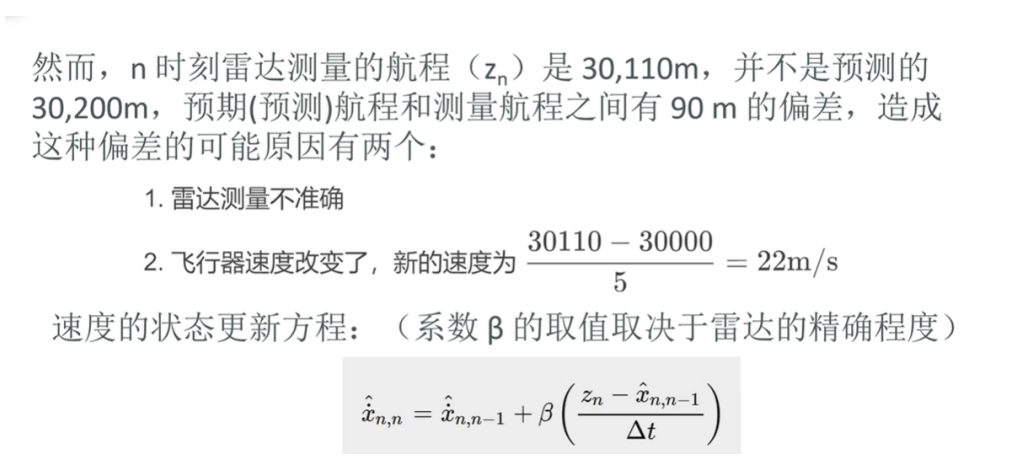 假设雷达的精度是20m,此时的误差更可能是由于飞行器速度发生了改变,那么此时我们更信任雷达的测试结果,所以我们将系数调高(当系数β=1时,估计值结果=测量值);
假设雷达的精度是20m,此时的误差更可能是由于飞行器速度发生了改变,那么此时我们更信任雷达的测试结果,所以我们将系数调高(当系数β=1时,估计值结果=测量值);
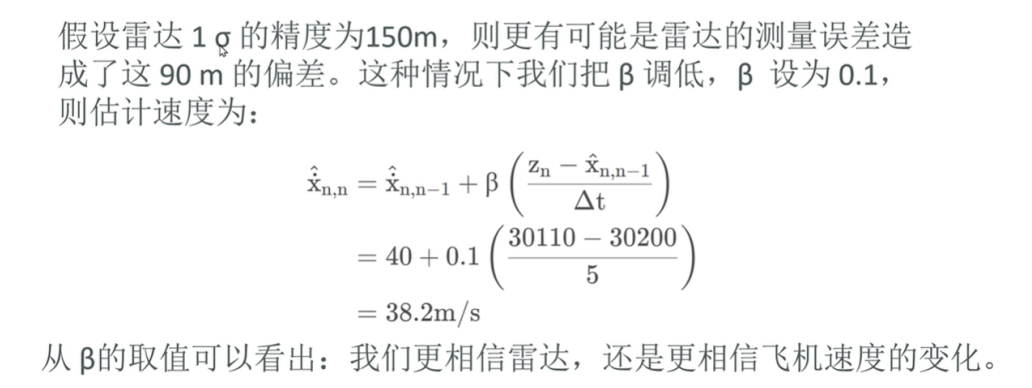
假设雷达的精度是150m,此时的误差更可能是由于雷达误差结果,那么此时我们更信任飞机速度变化,所以我们将系数调低(当系数β=0时,估计值结果=先验估计值);
 具体流程:根据分析,我们设置权重因子,开始第0次迭代,首先依然是初始化,输入估计值,与上一个例子不同是,此时我们是动态模型,预测后,先验估计值与输入值是不同的;
具体流程:根据分析,我们设置权重因子,开始第0次迭代,首先依然是初始化,输入估计值,与上一个例子不同是,此时我们是动态模型,预测后,先验估计值与输入值是不同的;
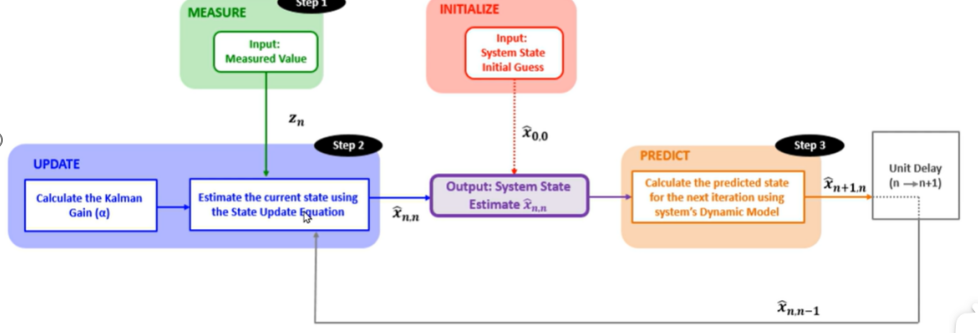
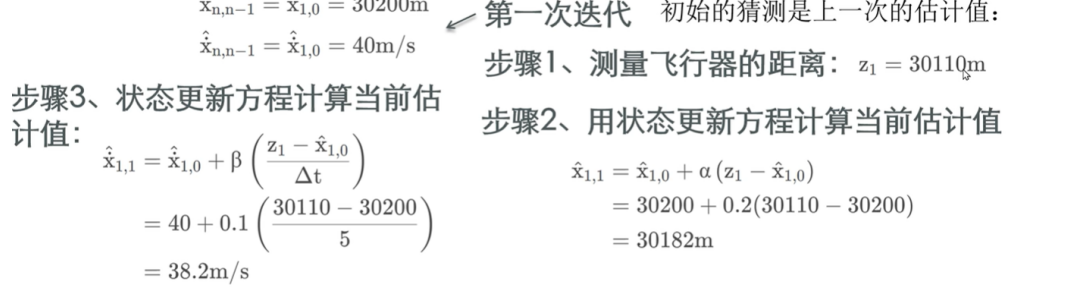
将预测的结果作为输入给到状态更新方程,同时输入测量值,通过状态更新方程计算当前估计值;
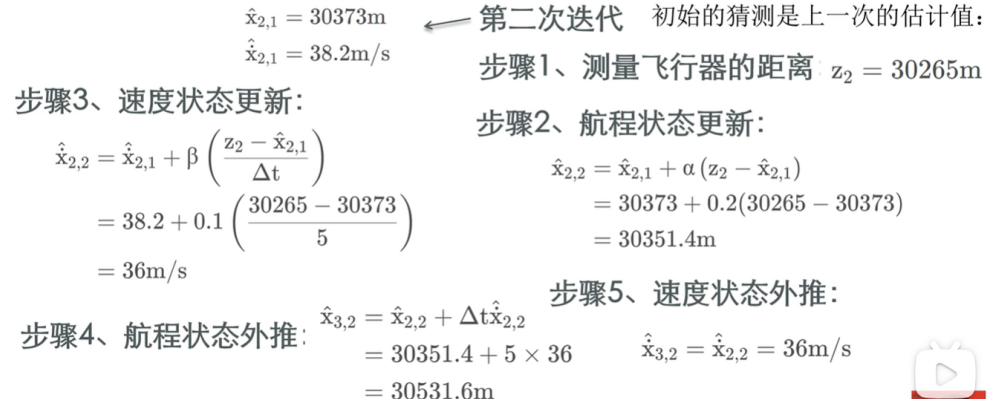
继续预测下一刻的先验估计值;

不断迭代:最终我们得到结果
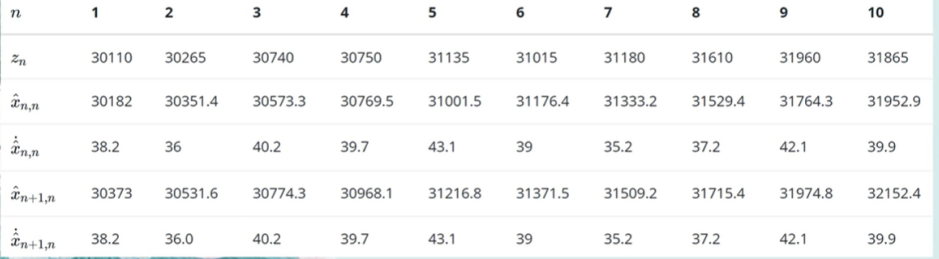
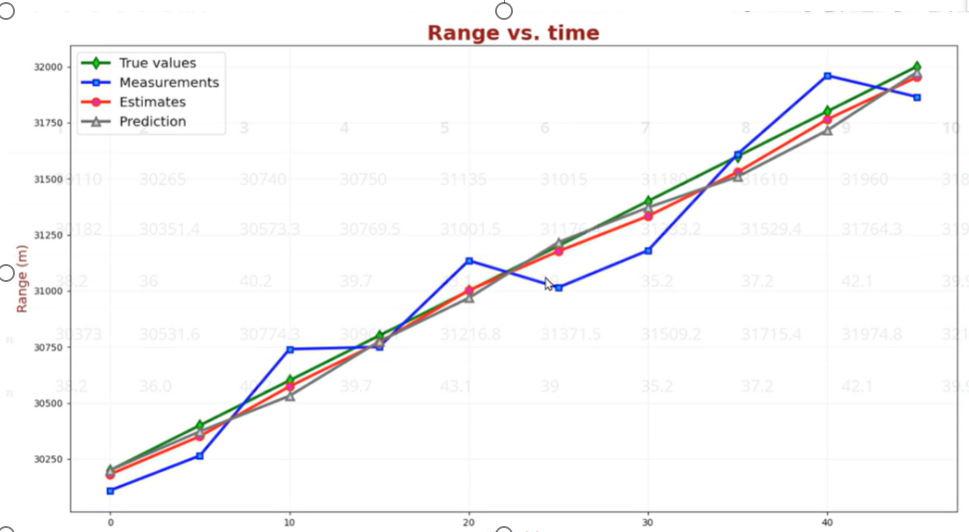
我们可以看出,可以看到估计算法对估计结果有平滑作用,并且估计结果趋近真实值。
尝试改变权重因子:
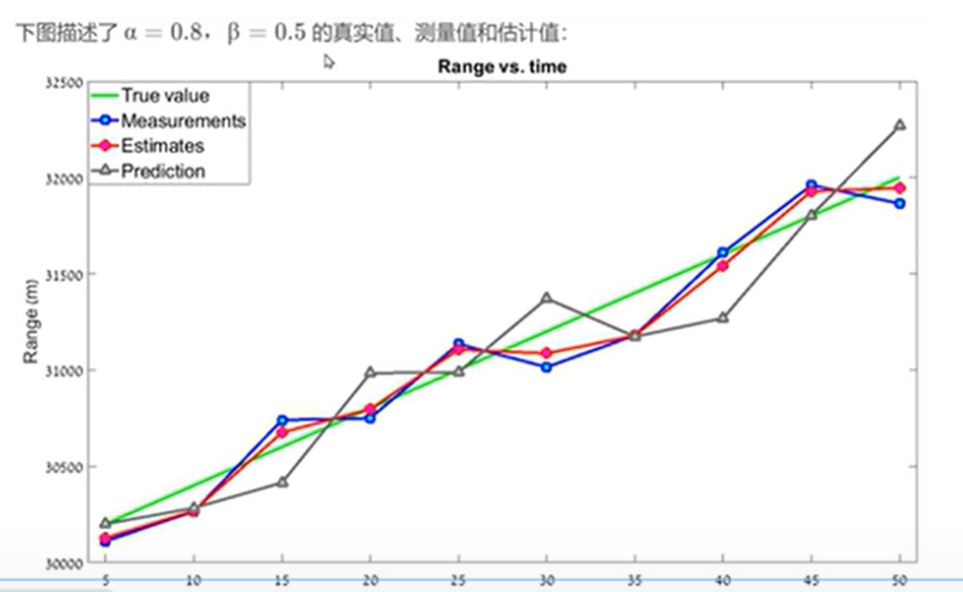
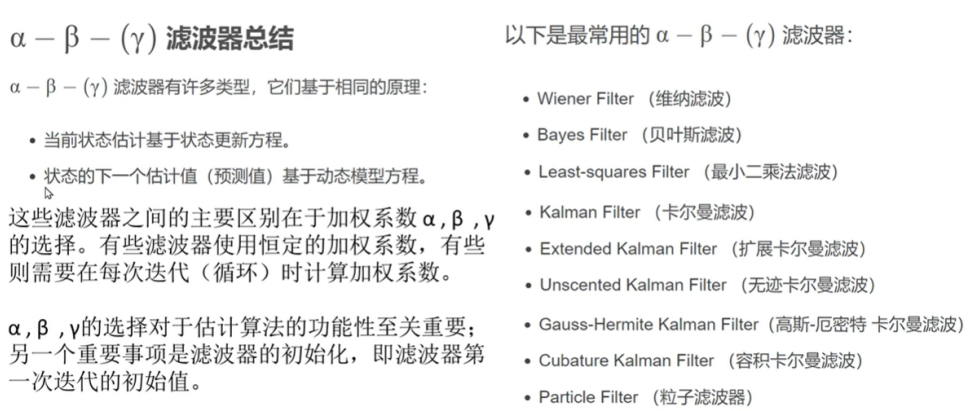
结果并不理,所以滤波器系数的选择是至关重要的;
滤波器系数的选择:
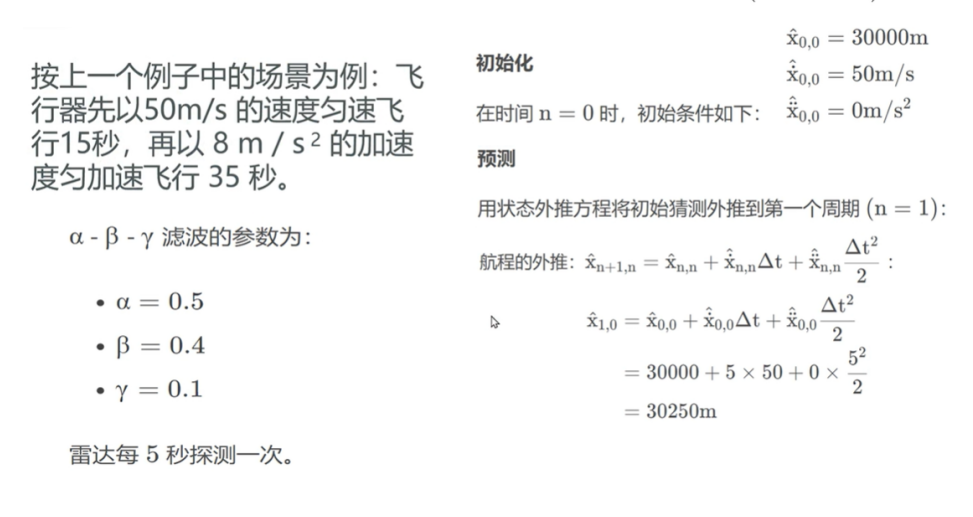
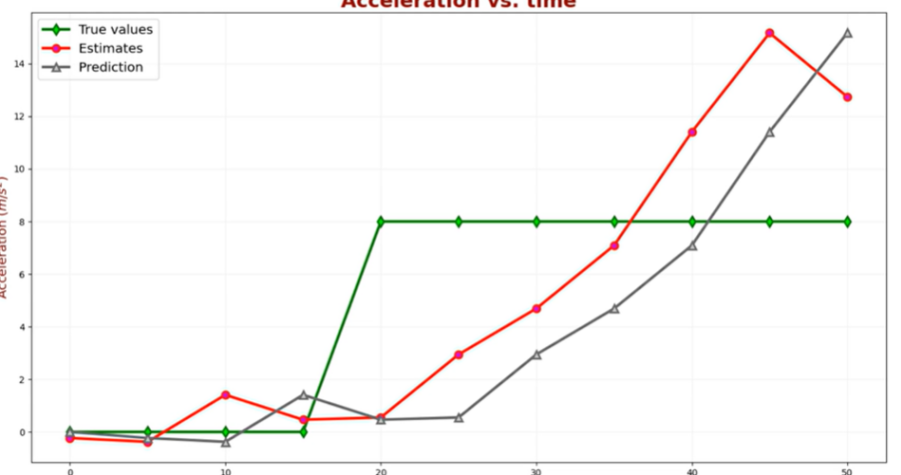
对于这个案例,系统状态为航程情况下,动态改变的除了速度还可能有加速度,例如现在来一架战斗机,它先以50m/s 的恒定速度飞行 15 秒然后以 8 m/s2 的加速度匀加速飞行 35秒。入图显示了目标航程、速度、加速度随时间的变化。此时α-β两个系数将不能满足我们的需求,依然使用该滤波器,分析:
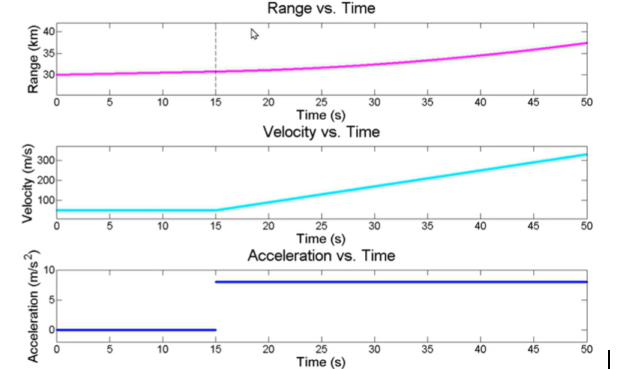
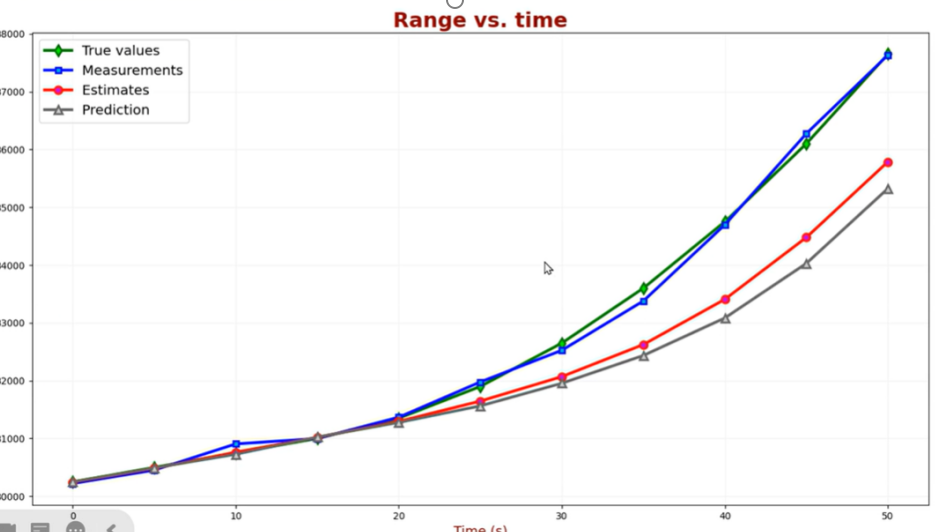
会发现,误差非常大:
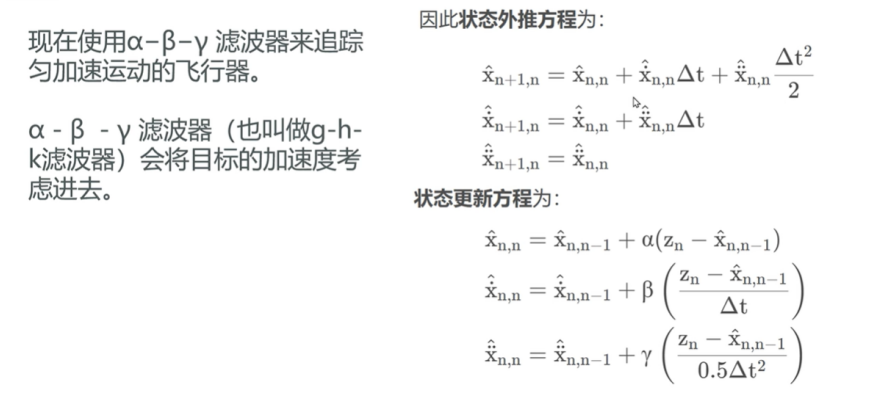
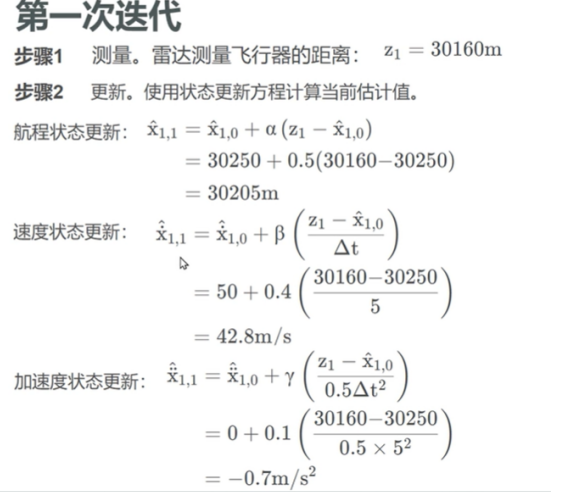
现在使用α-β-Γ滤波器来追踪:
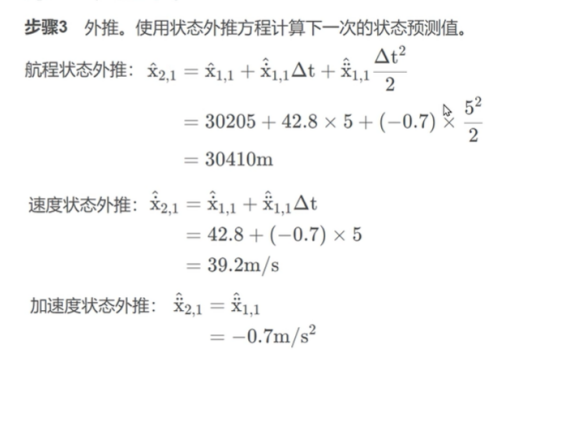
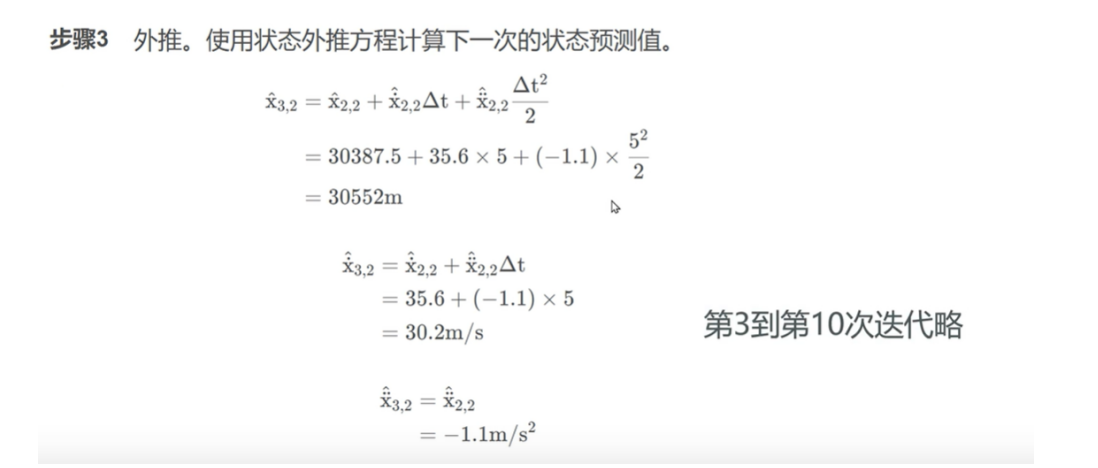
根据动力学分析,此时的系统状态外推方程:
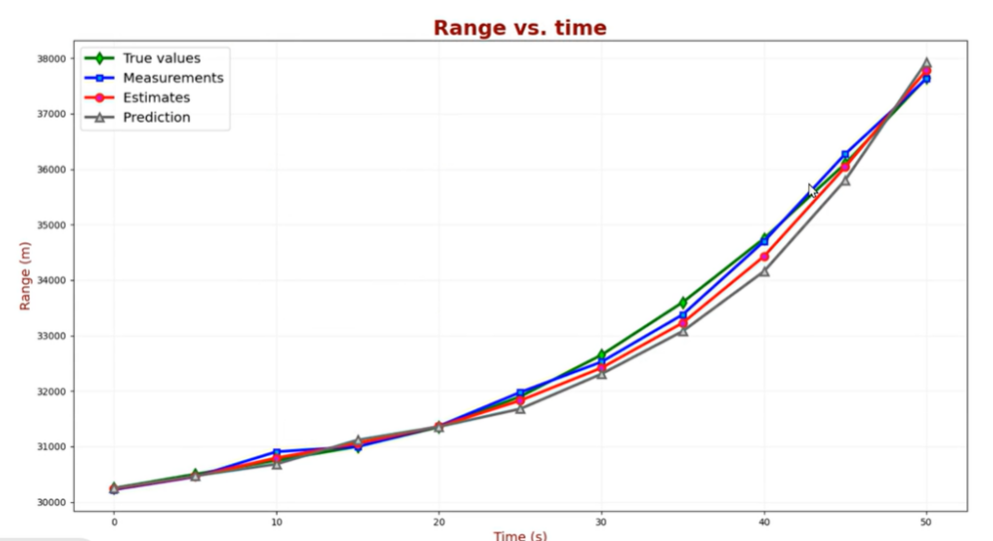
最终得到结果:航程的拟合还是不错的;
但是速度和加速度的拟合效果并不好: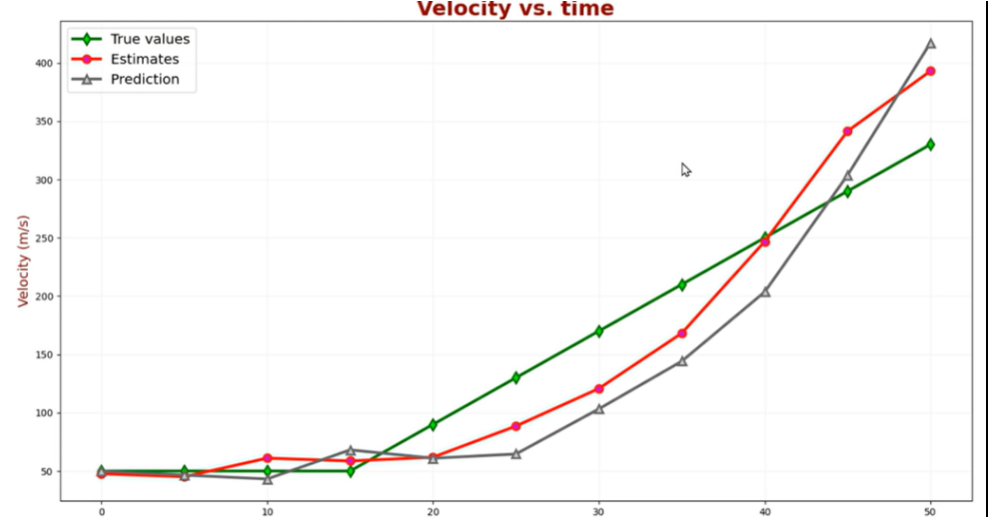
 卡尔曼滤波器就可以处理动态情况下的问题;
卡尔曼滤波器就可以处理动态情况下的问题;
总结:
卡尔曼滤波的第一个方程:通过先验估计值和对残差的权重求和得到当前估计值;
卡尔曼滤波的第二个方程:通过动态模型,得到状态外推方程,去求得先验估计值;