ABB RobotStudio学习记录(一)新建工作站
RobotStudio新建工作站
最近遇到
虚拟示教器和 Rapid 代码不能控制 视图中机械臂的问题,其实是由于机械臂和工作站不匹配。以下是解决方法。
| 名称 | 版本 |
|---|---|
| Robot Studio | 6.08 |
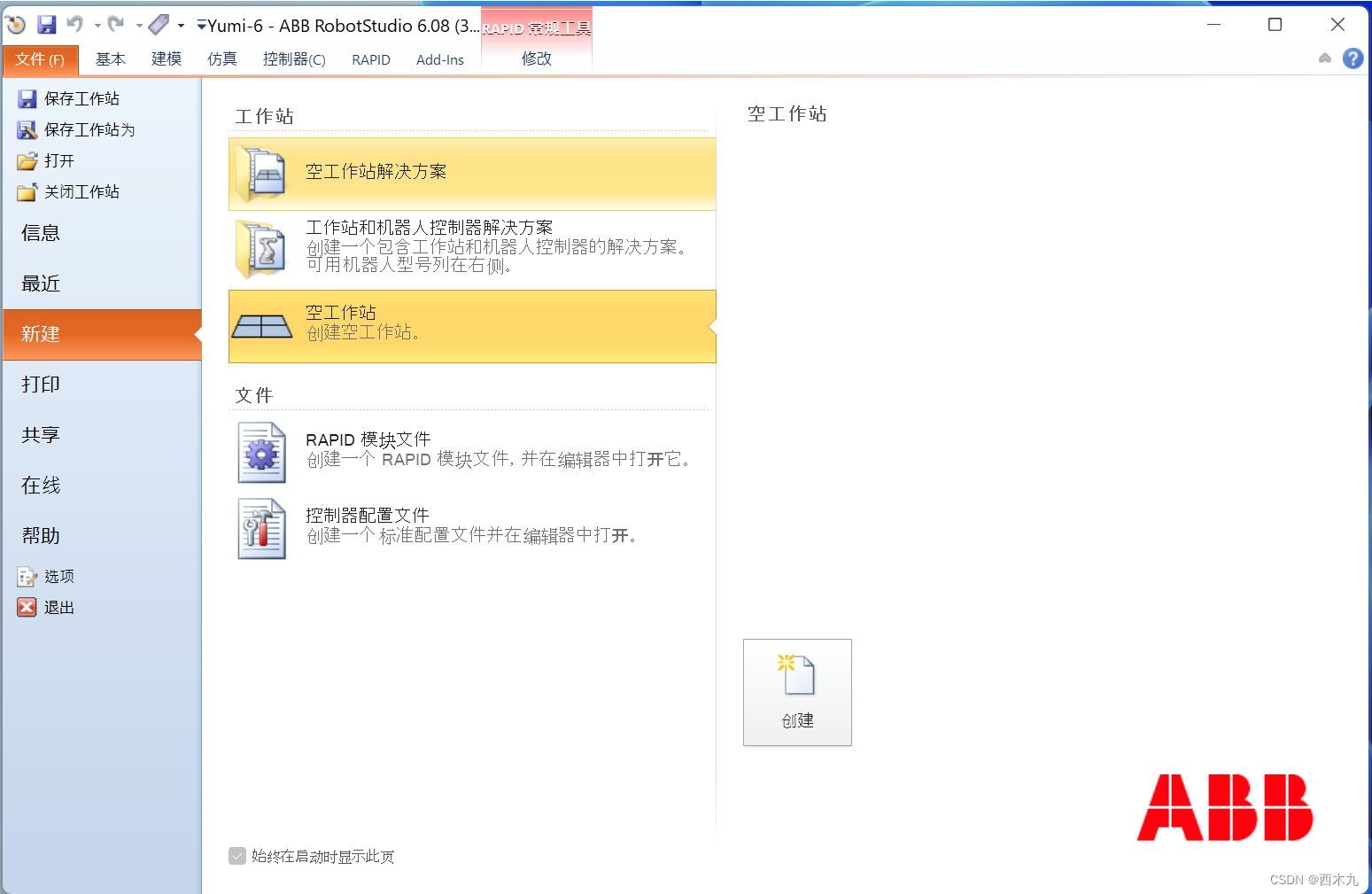
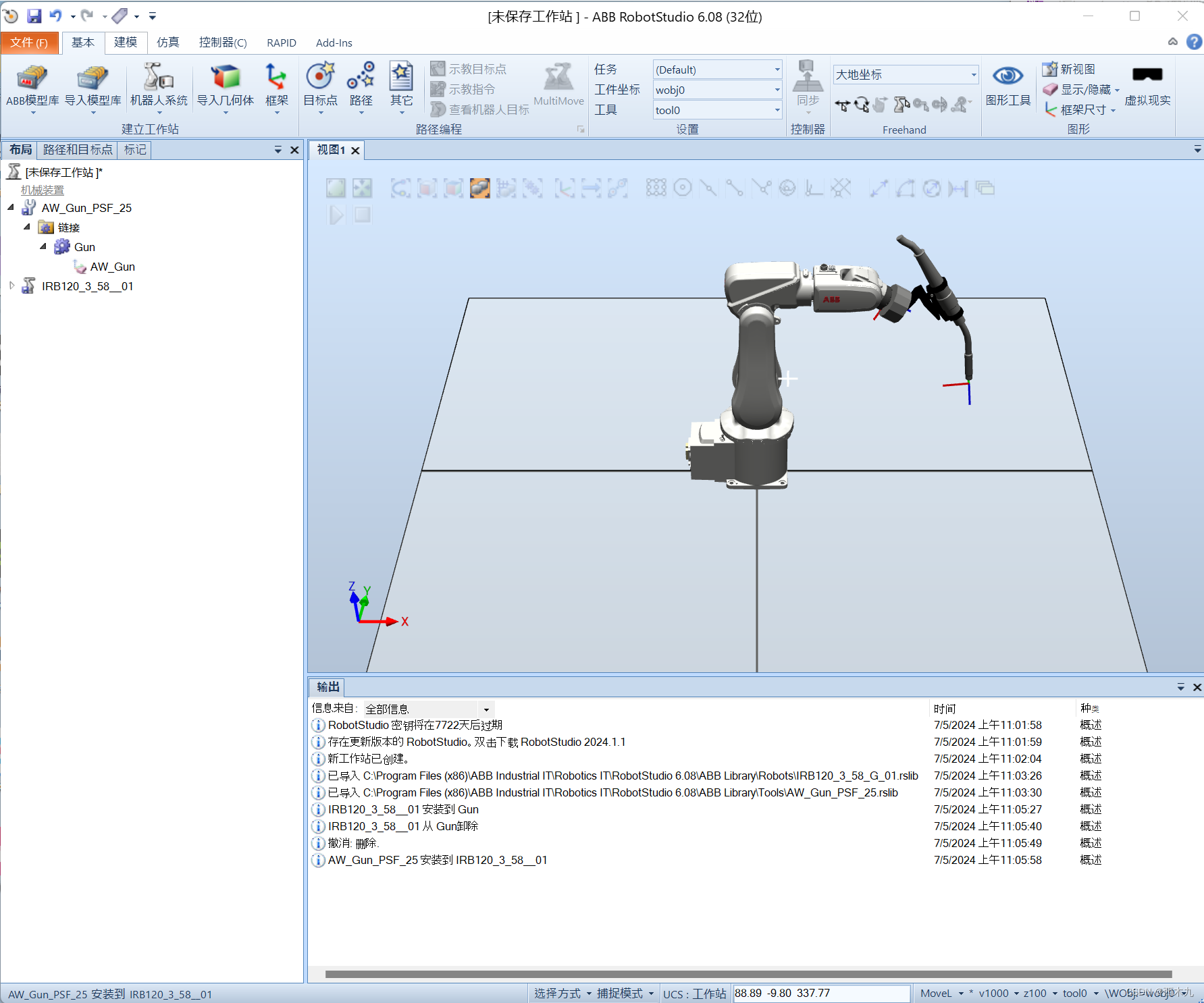
- 新建一个”空工作站“;
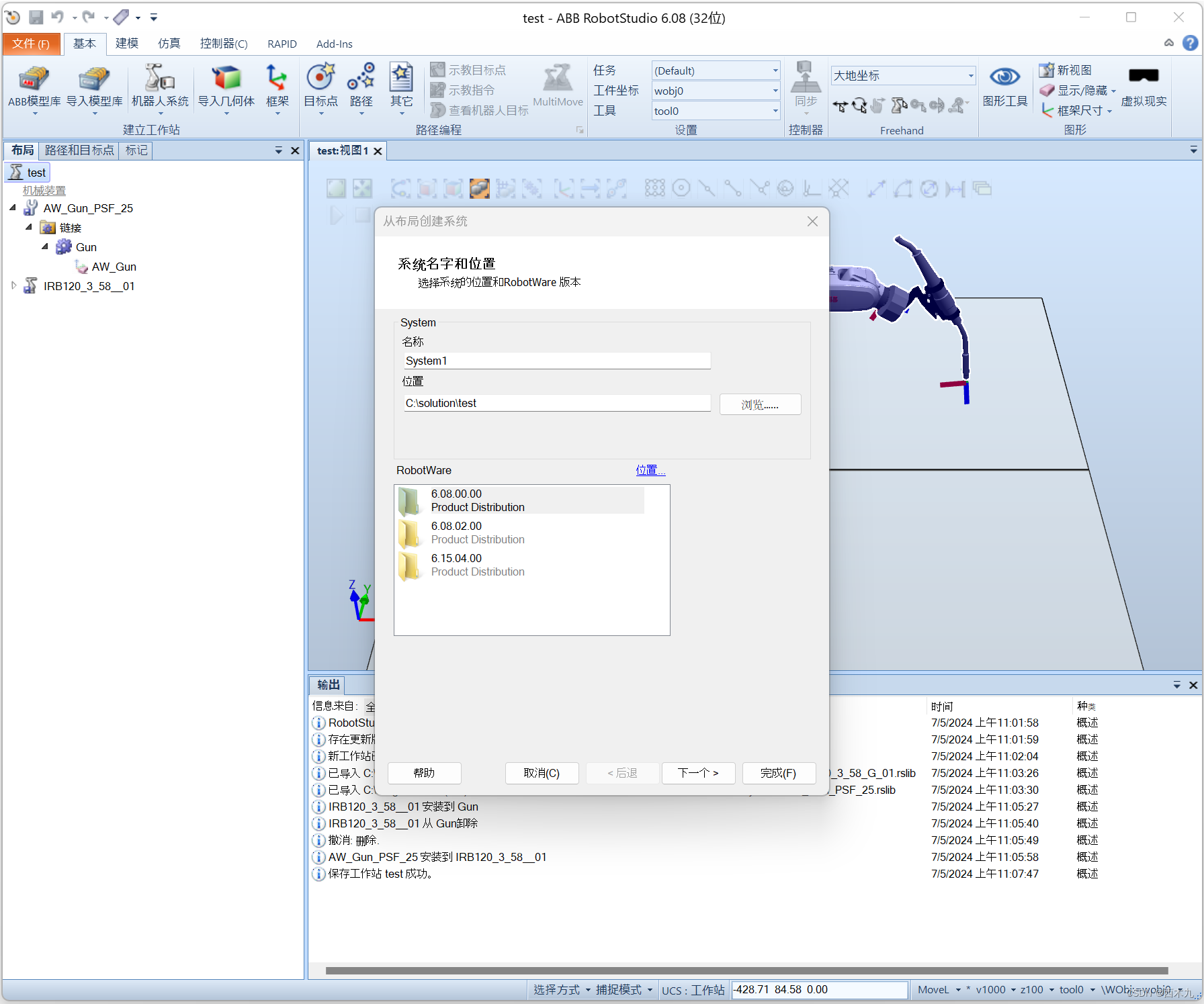
- 在目标位置新建一个目标文件夹
C:\solution\test,用以后续存放该工作站(通常路径不能有中文); - 导入机械臂模型
ABB模型库;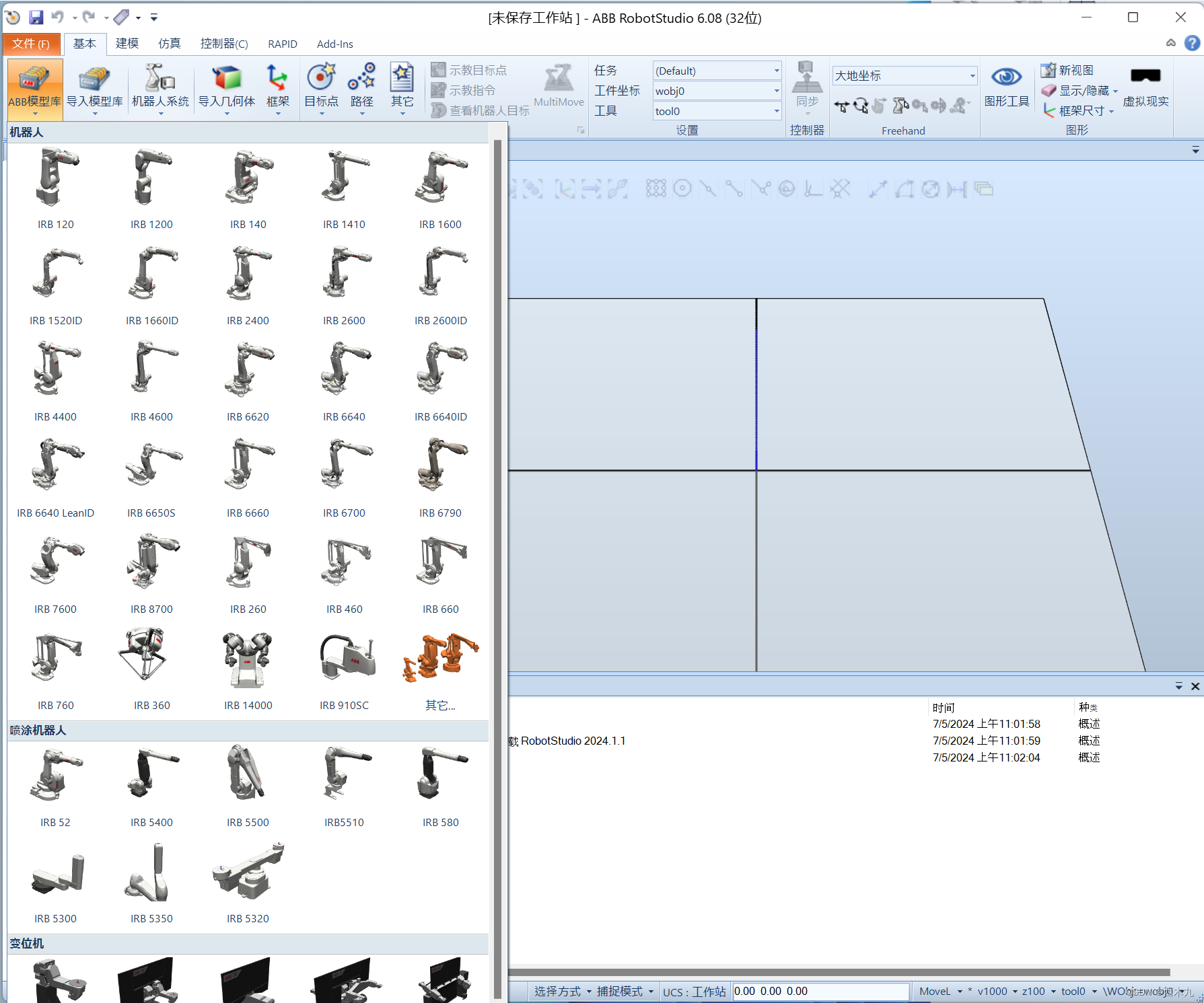
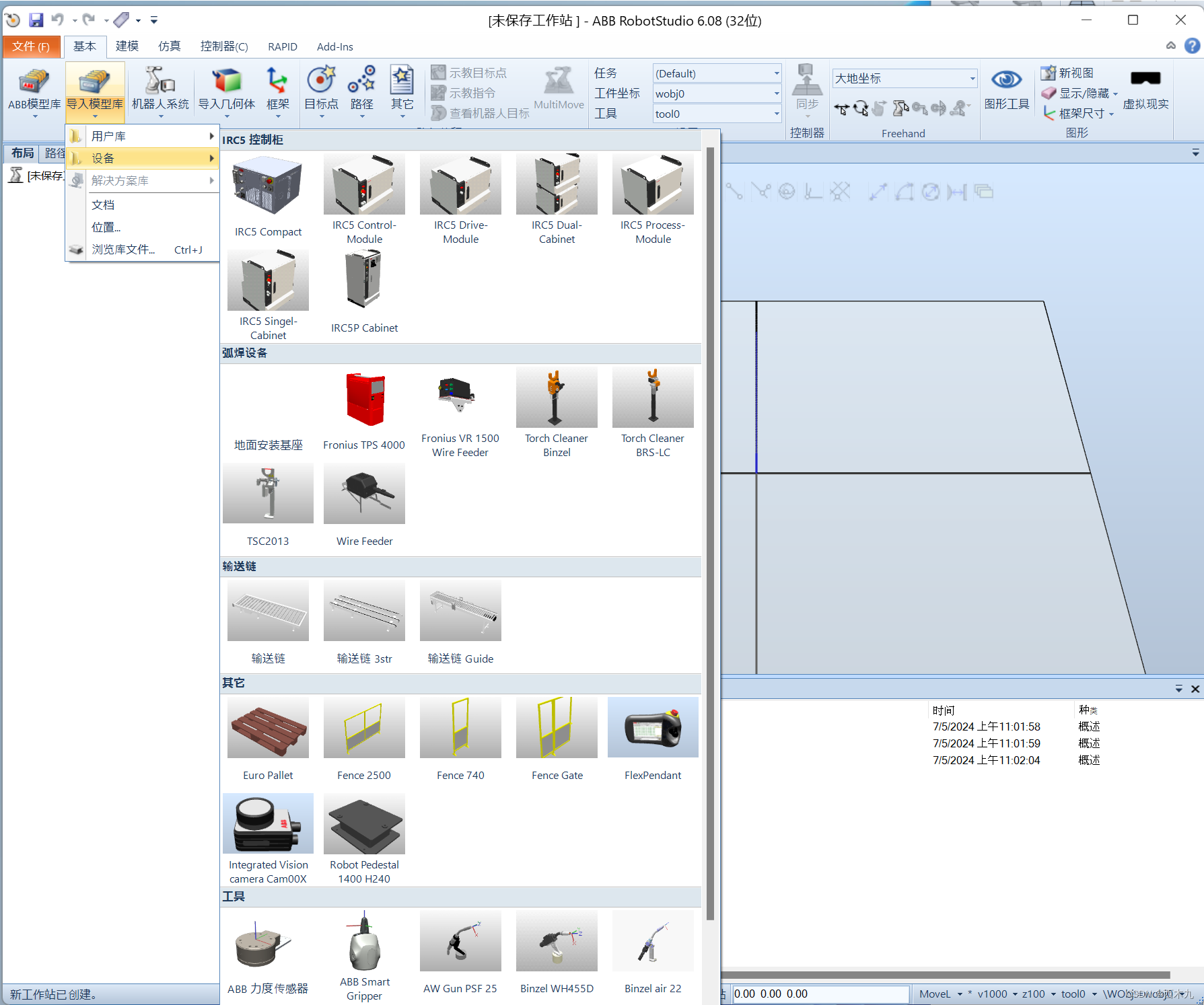
- 入手爪设备
导入模型库 -> 设备,右键选中安装到机械臂上
5. 选中整个工作站 -> 从布局新建我们的系统,位置为目标文件夹\test;
6. 选项处可设置自定义信息,例如616-PC Interface 和 623-Multitasking等。
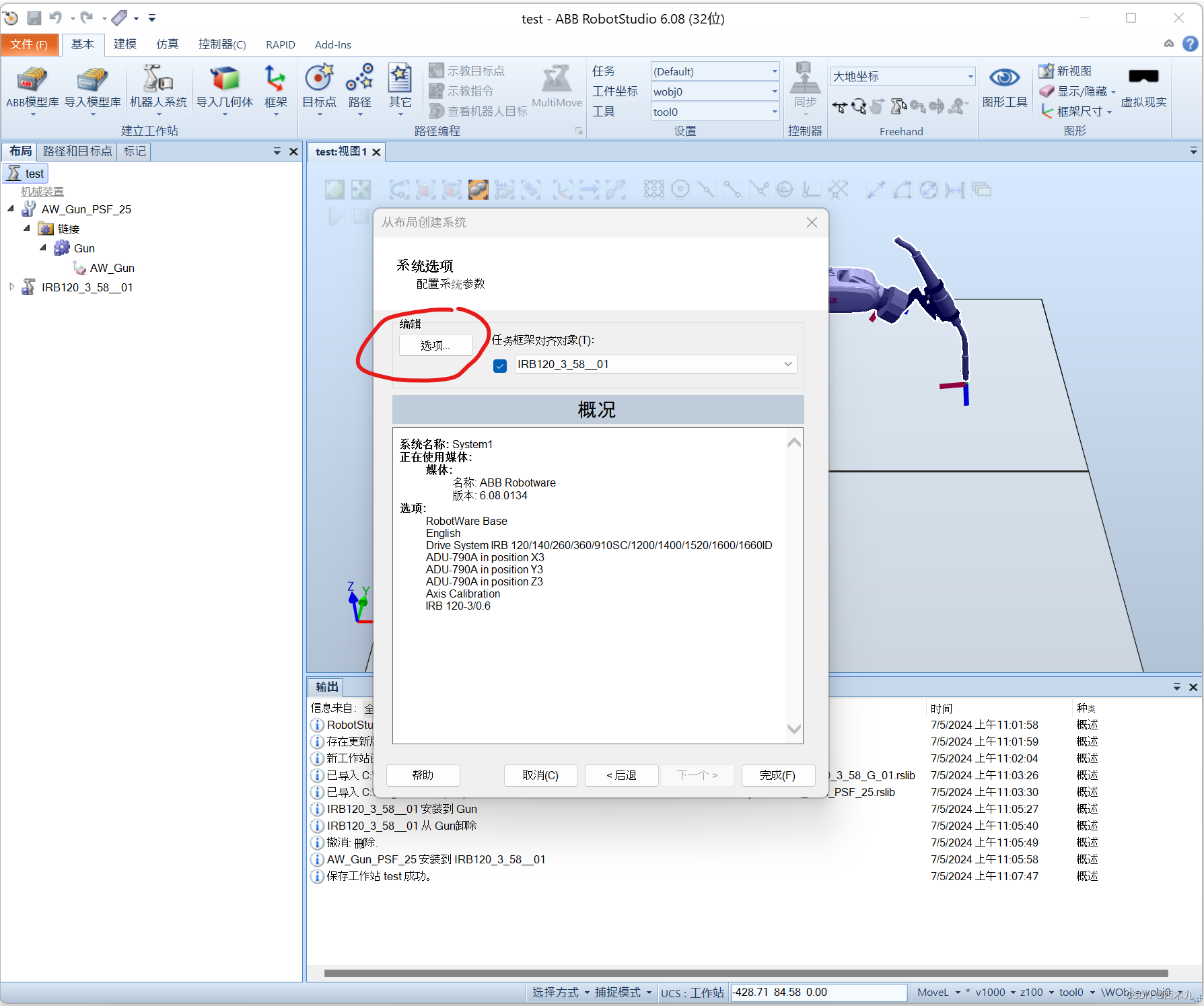
按以上操作就可以用虚拟示教器控制视图中的机械臂了。