高精度地图导航论文汇总
文章目录
- 2021
- 基于车载激光点云的高精地图矢量化成图[J]
- 2022
- 基于高精度地图的智能车辆路径规划与跟踪控制研究[M]
- 2023
- 一种无人驾驶融合决策方案的设计与实现[M]
2021
基于车载激光点云的高精地图矢量化成图[J]
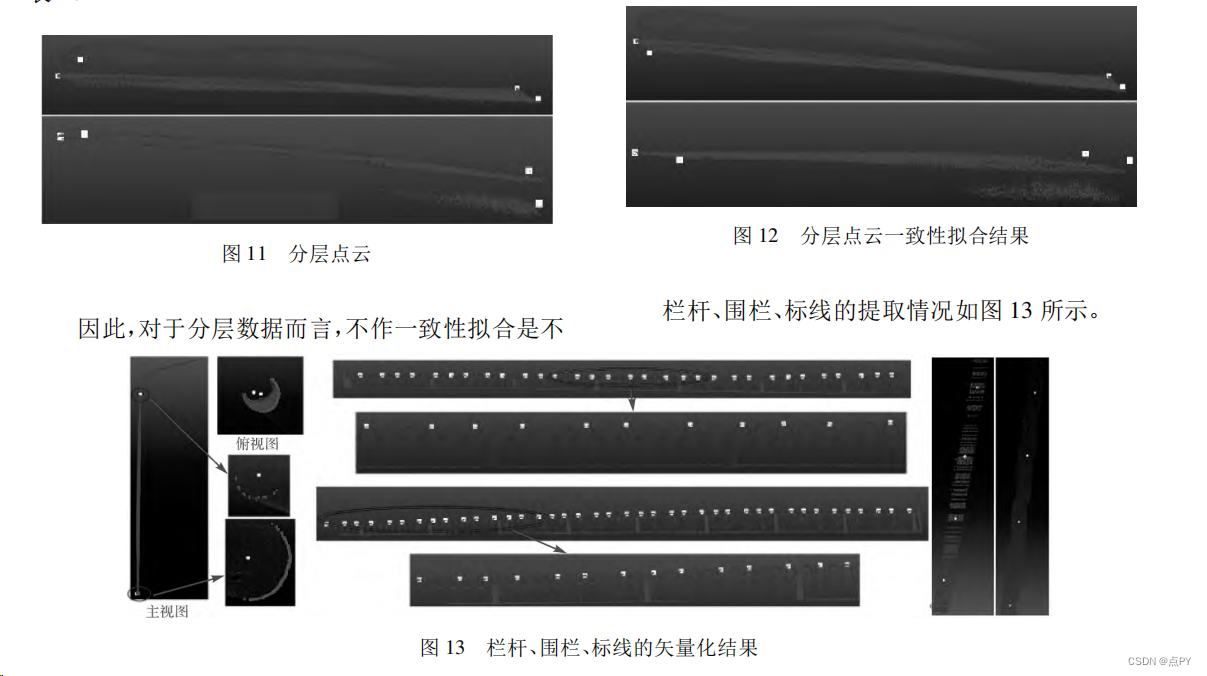
摘要: 针对车载激光点云中对各特征物提取结果后矢量化成图时的自动化问题,本文基于双方向积分法实现了边缘检测及矢量化成图,旨在保证特征物基本特征的同时,也保证点云的绝对精度。将输入的特征点云进行离群点过滤,以保证外包框算法特征点云的准确度; 将三维点云按照外包框算法投影至最优平面,为后续沿各方向积分提供输入; 利用八邻域 KD-tree 算法求出样本特征点云的均值邻域半径,依据邻域半径对各方向积分提供积分域中的微分元; 根据提供的微分元沿各方向进行积分,在该积分元内找到距平面最值的最优解; 按照积分结果构建点云索引,并根据点云特征构建模型,最终得到高精地图的矢量化点云。试验证明了该方法在处理实际问题时的可行性。
2022
基于高精度地图的智能车辆路径规划与跟踪控制研究[M]
摘要: 随着计算机及通信技术的不断进步,汽车行业也得到了飞速的发展。汽车在为人们的日常生活提供极大便利的同时,也带来了交通安全、交通拥堵和环境污染等问题。自动驾驶技术作为提高汽车行驶安全性的关键技术之一,越来越受到人们的关注。
自动驾驶技术主要包括环境感知与定位、智能决策与规划和控制执行三部分。本文主要针对自动驾驶汽车在高精度地图、路径规划以及路径跟踪控制等方面展开相关的研究,主要工作包括:
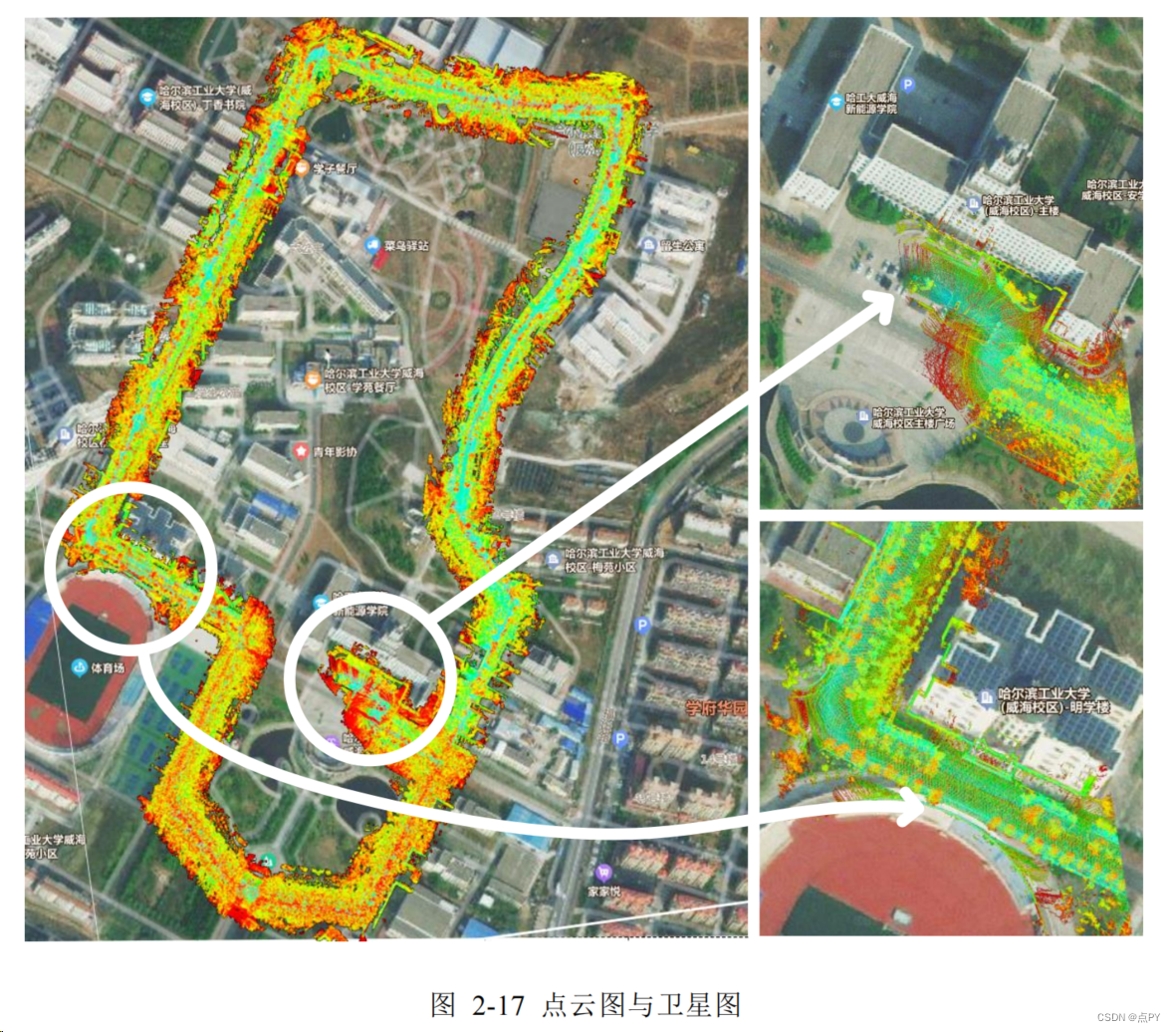
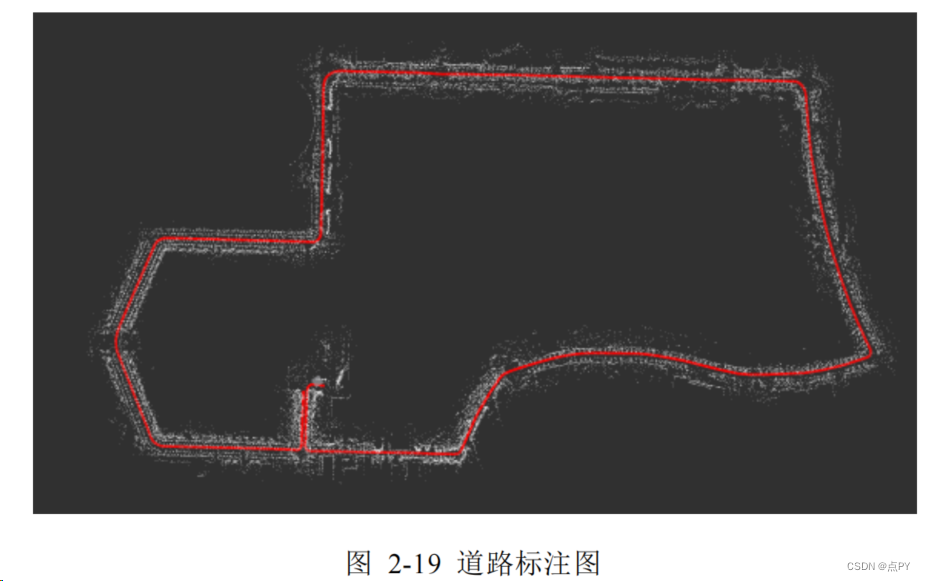
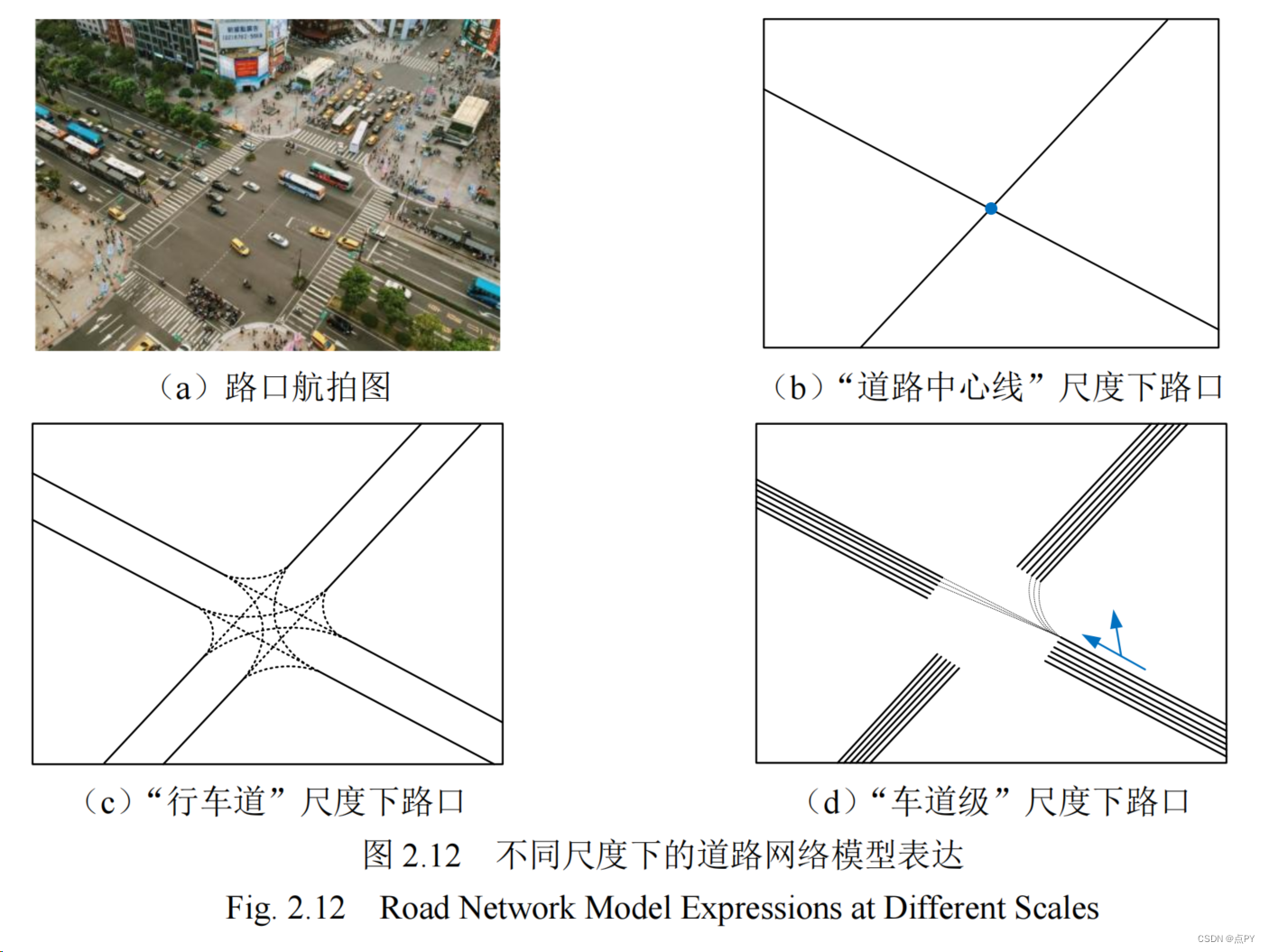
首先建立了适用于智能车辆的车道级高精度地图。为满足自动驾驶车辆对定位精度的需求,通过对 GPS 定位系统和惯性导航系统的组成、坐标转换及工作原理等进行了相关的阐述,并最终采用 RTK-GPS/INS 组合导航定位系统作为本文的高精度定位系统,并搭配千寻位置的差分服务使定位精度达到厘米级。选择车道级的道路网络模型并通过对校园道路进行数据采集,建立了由车道中心线节点构成的车道级高精度地图网络模型,并通过三次样条曲线对车道中心线路径采集点进行插值。
其次通过对建立的车道级高精度地图网络模型进行道路拓扑关系的抽象化表达,将实验采集区域的地图数据抽象为具有 64 个顶点和 78 条边的有向图,并将车道的长度作为边的权值,通过在 MATLAB 中编写相关的程序将抽象化后的有向图数据以邻接矩阵的方式储存起来。通过选择 Dijkstra 算法作为本文的最短路径规划算法,分别选择校园东门和西门作为路径规划的起点和终点,进行了最短路径规划,得到了从校园东门到西门的最短路径。
然后建立了车辆动力学模型和轮胎模型,设计了基于模型预测控制算法的路径跟踪控制器,搭建了 Carsim 与 Simulink 联合仿真平台并通过选择双移线轨迹来验证跟踪算法的可行性,结果表明该算法能够达到跟踪控制的目的,跟踪误差较小。
最后通过实车实验的方式验证了本文所建立的高精度地图以及路径跟踪控制算法的实用性。通过选取规划的最短路径中包含的部分路段作为实车实验测试路段,实验结果表明:路径跟踪控制器能够使被控车辆对所选取的测试路段的参考车道中心线轨迹进行有效的跟踪,跟踪过程中最大误差为 0.35m。
2023
一种无人驾驶融合决策方案的设计与实现[M]
摘要: 随着传感器技术的不断发展和计算机对环境的感知能力的增强,以及深度学习、强化学习等科学技术的突破,无人驾驶技术成为了一个备受关注的领域。在这种大环境下,无人驾驶技术已经被推向了新的高潮。当前无人驾驶主要分为两大阵营,一是依靠传感器、计算平台不断提高车辆自身的识别检测能力,称为单车智能驾驶,另一类是依靠高带宽低延时的通信技术和增加路测的辅助设备来实现,称为网联车智能驾驶。前者的主要问题是单车能耗和成本高,观测不充分,后者的问题是通信延时高。同时二者都存在地图精度低、定位精度低频率慢等缺点。
针对无人驾驶点云地图构建难度大、精度低以及在大地图中做精细定位困难的问题,本文分析了运动导致匹配点偏移的现象,提出了运动补偿算法,并在 ROS 操作系统中进行了实现和测试。结果表明,对比主流的建图算法 LeGOLOAM,本文提出的算法在公开数据集 KITTI 上精度提高了 30%以上。本文分析了地图结构和传感器自身的特性,提出了高频高精度的重定位算法。利用全
球卫星导航系统(GPS)和地图结构做全局的重定位,利用惯性测量单元(IMU)和激光雷达做实时局部定位,并在实际环境中进行了测试。结果表明,本文提出的重定位系统定位精度在厘米级,定位频率在百赫兹级,满足自动驾驶要求。
针对单车智能驾驶能耗高、成本昂贵和网联车在危险情况反应慢等问题,本文提出构造一个分布式的融合决策系统,设计了三个具有实际意义的测试场景来分析和验证,分别是测试信号延时和能耗、成本节省的巡航场景、测试观测不一致性的红绿灯路口通行场景,以及测试危险情况响应速度的行人横穿马路的场景。实验结果表明,巡航误差在厘米级,满足自动驾驶要求;验证了危险情况响应速度较网联车智能驾驶快了 20ms 以上;验证了融合决策系统能在观测不一致的情况下做出最安全的决策;本系统对比主流的无人驾驶系统 RT6在能耗方面节省了 74%以上、成本方面节省了 90%以上。
本文提出的融合决策系统结合了单车智能驾驶和网联车智能驾驶各自的优点,在完成无人驾驶任务的要求下能耗和成本大幅降低,响应速度大幅提升。提出运动补偿原理优化了无人驾驶地图构建算法,根据地图结构和传感器特性实现了在大地图中精细定位的重定位算法。