当前位置: 首页 > news >正文 【无人机/平衡车/机器人】详解STM32+MPU6050姿态解算—卡尔曼滤波+四元数法+互补滤波(文末附3个算法源码) news 2025/8/3 12:54:10 效果: MPU6050姿态解算-卡尔曼滤波+四元数+互补滤波 目录 基础知识详解 欧拉角 查看全文 http://www.lryc.cn/news/338566.html 相关文章: 智能水务系统:构建高效节水的城市水网 【JavaEE初阶系列】——网络编程 UDP客户端/服务器 程序实现 数据结构复习指导之绪论(算法的概念以及效率的度量) C语言经典例题(23) Gitea的简单介绍 Qt信号与槽 QQ农场-phpYeFarm添加数据教程 Java中创建多线程的方法 MT3020 任务分配 【Redis】事务 每日一题(leetcode238):除自身以外数组的乘积--前缀和 内网通如何去除广告,内网通免广告生成器 视频知识整理 【2024】使用Rancher管理k8s集群和创建k8s集群 生成对抗网络 – Generative Adversarial Networks | GAN 基于深度学习的生活垃圾智能分类系统(微信小程序+YOLOv5+训练数据集+开题报告+中期检查+论文) 软件包名生成参考 八大排序算法(面试被问到) SCP指令详细使用介绍 《前端面试题》- JS基础 - 防抖和节流 RAGFlow:基于OCR和文档解析的下一代 RAG 引擎 正则表达式|*+? 前端开发攻略---根据音频节奏实时绘制不断变化的波形图。深入剖析如何通过代码实现音频数据的可视化。 【计算机毕业设计】基于Java+SSM的实战开发项目150套(附源码+演示视频+LW) STM32H7的MPU学习和应用示例 964: 数细胞 流程图步骤条 GPT知识库浅析 SpringMVC--SpringMVC的视图 Datax,hbase与mysql数据相互同步
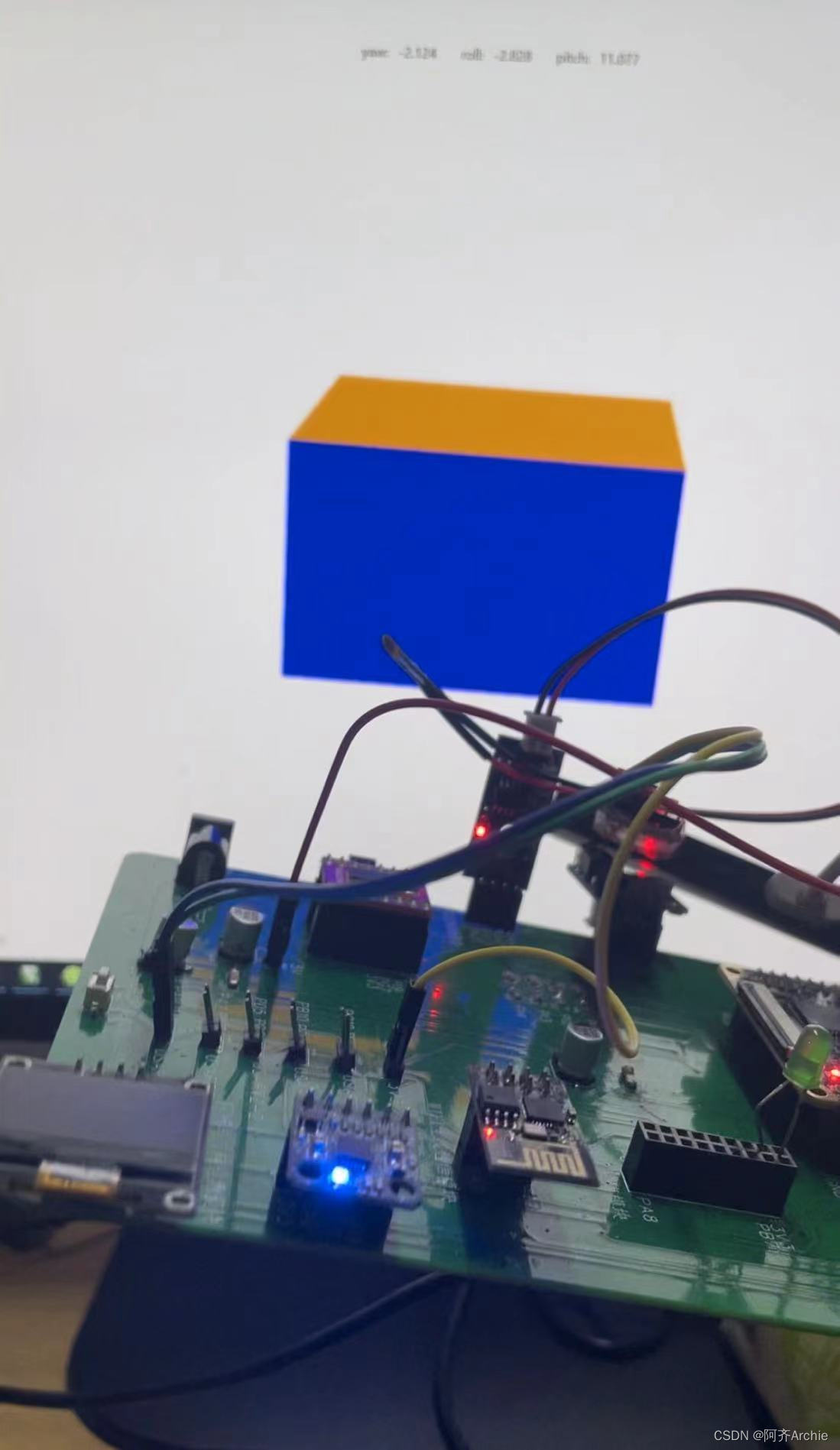
效果: MPU6050姿态解算-卡尔曼滤波+四元数+互补滤波 目录 基础知识详解 欧拉角 查看全文 http://www.lryc.cn/news/338566.html 相关文章: 智能水务系统:构建高效节水的城市水网 【JavaEE初阶系列】——网络编程 UDP客户端/服务器 程序实现 数据结构复习指导之绪论(算法的概念以及效率的度量) C语言经典例题(23) Gitea的简单介绍 Qt信号与槽 QQ农场-phpYeFarm添加数据教程 Java中创建多线程的方法 MT3020 任务分配 【Redis】事务 每日一题(leetcode238):除自身以外数组的乘积--前缀和 内网通如何去除广告,内网通免广告生成器 视频知识整理 【2024】使用Rancher管理k8s集群和创建k8s集群 生成对抗网络 – Generative Adversarial Networks | GAN 基于深度学习的生活垃圾智能分类系统(微信小程序+YOLOv5+训练数据集+开题报告+中期检查+论文) 软件包名生成参考 八大排序算法(面试被问到) SCP指令详细使用介绍 《前端面试题》- JS基础 - 防抖和节流 RAGFlow:基于OCR和文档解析的下一代 RAG 引擎 正则表达式|*+? 前端开发攻略---根据音频节奏实时绘制不断变化的波形图。深入剖析如何通过代码实现音频数据的可视化。 【计算机毕业设计】基于Java+SSM的实战开发项目150套(附源码+演示视频+LW) STM32H7的MPU学习和应用示例 964: 数细胞 流程图步骤条 GPT知识库浅析 SpringMVC--SpringMVC的视图 Datax,hbase与mysql数据相互同步