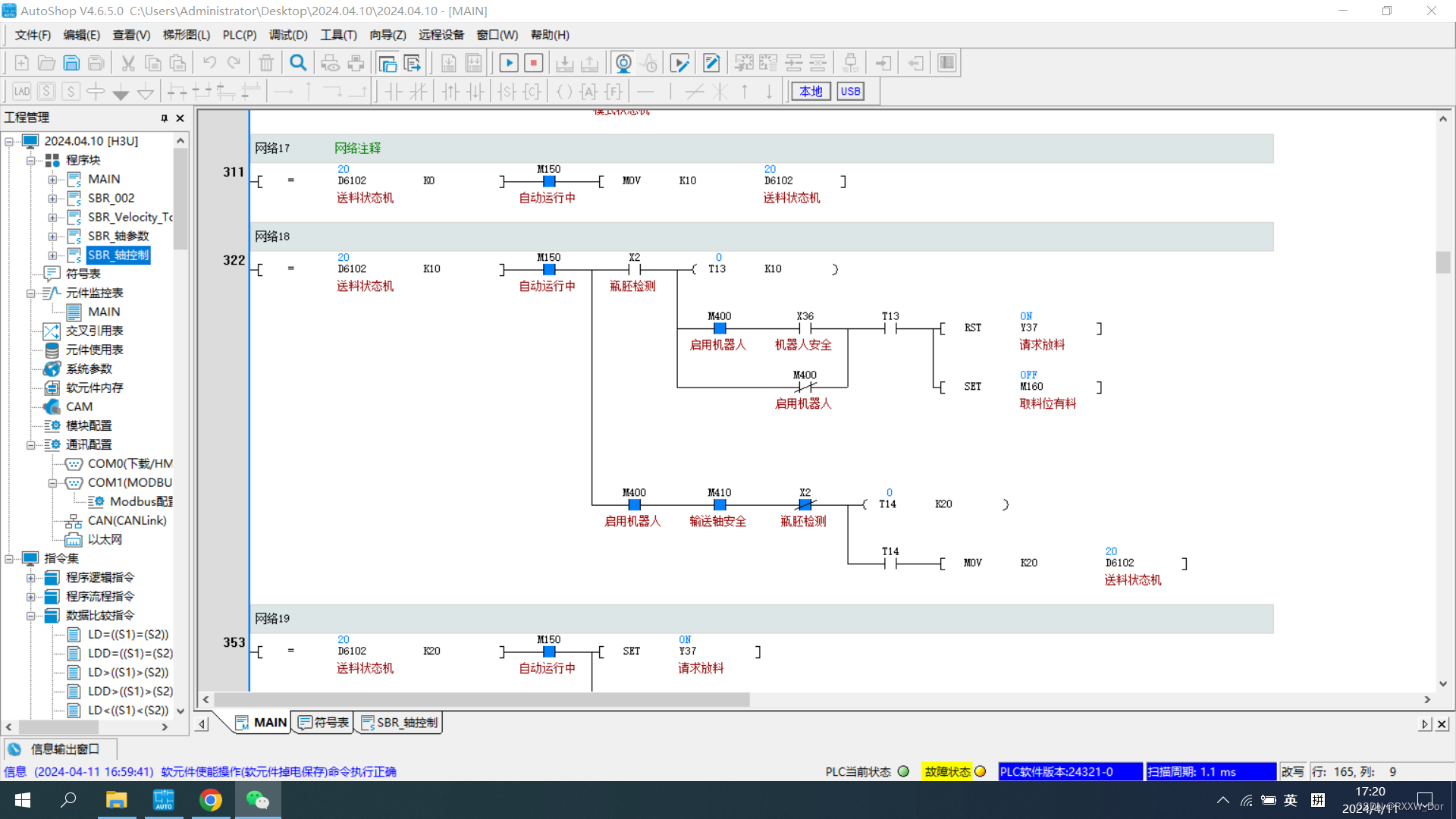
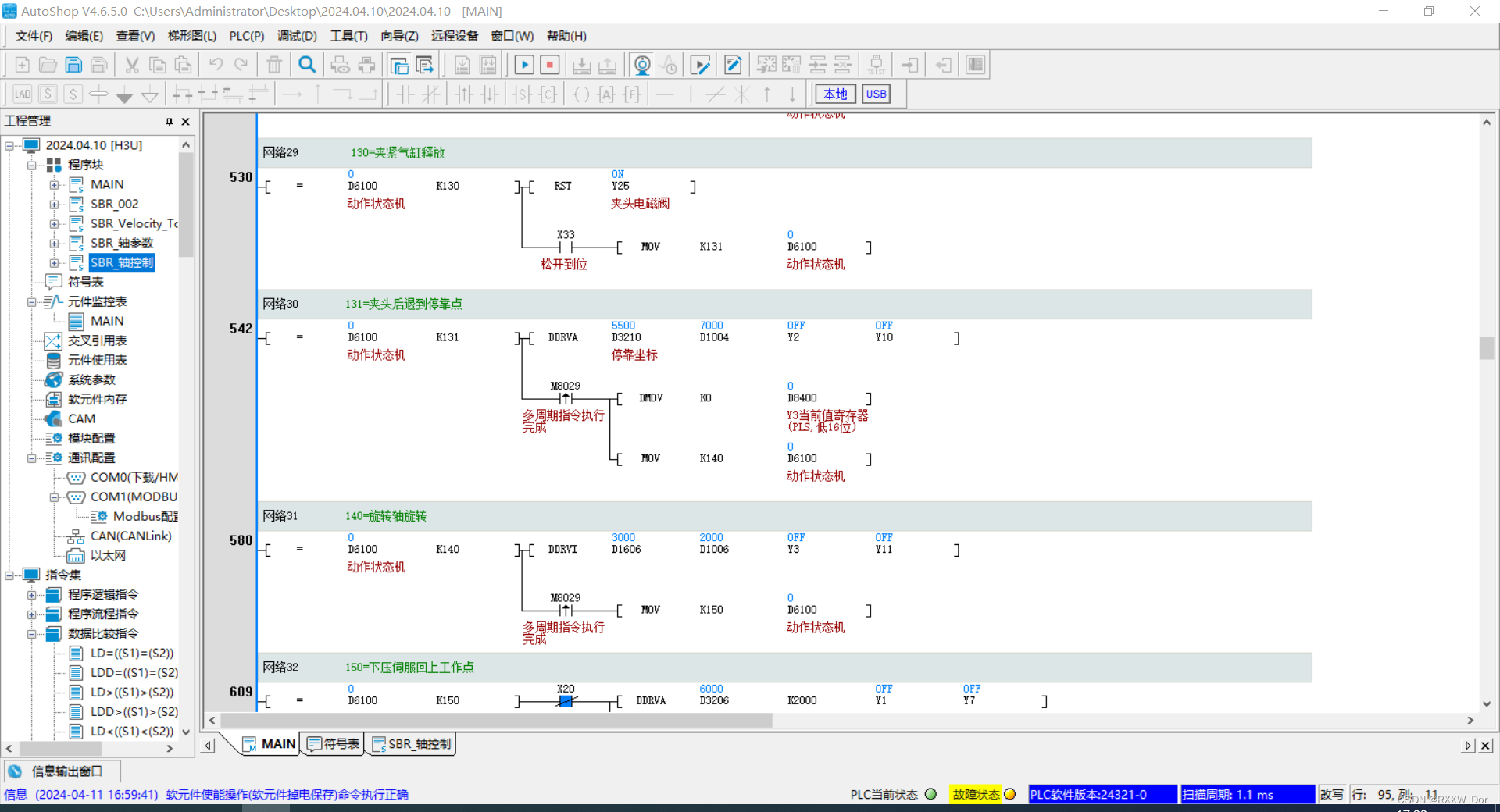
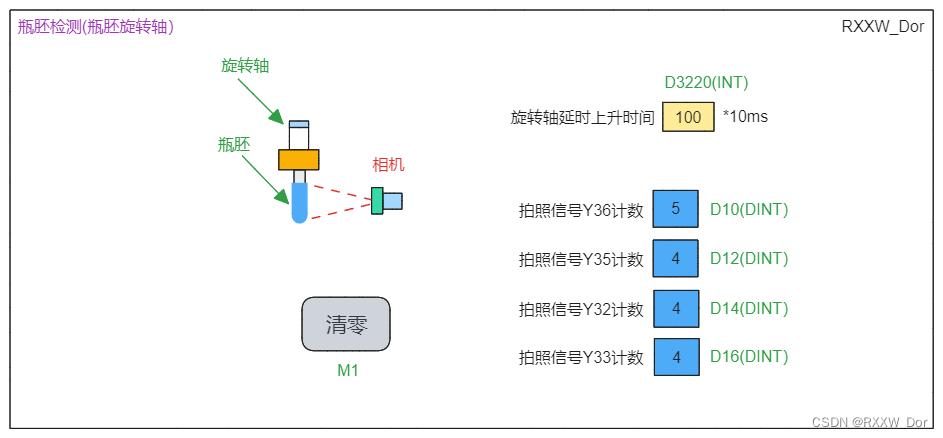
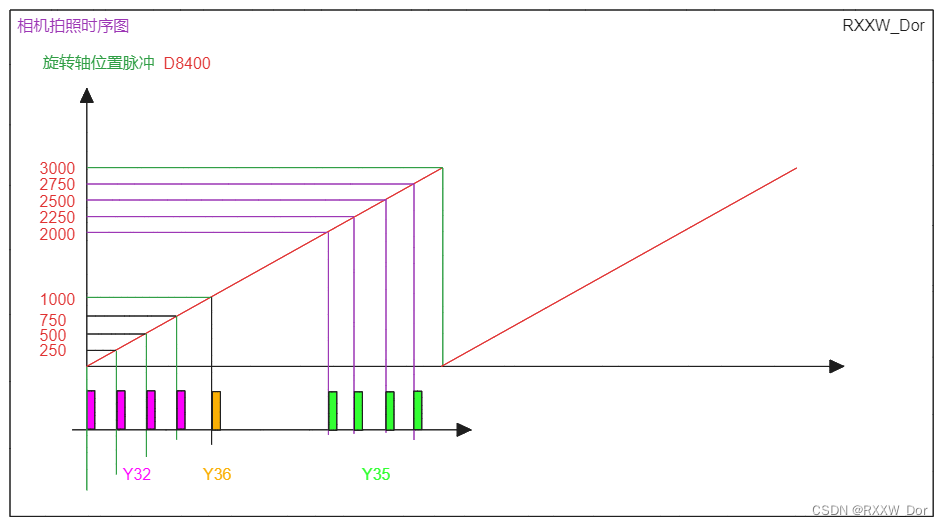
当前位置: 首页 > news >正文 机器人瓶胚检测工作站(H3U脉冲轴控制) news 2025/8/5 23:29:02 1、变量定义 2、程序监控1 2、 程序监控2 3、程序监控3 机器人输送料和机构的动作安全尤为重要,下面我们讨论下安全联锁控制逻辑 4、相机拍照触发信号 5、相机拍照触发时序 查看全文 http://www.lryc.cn/news/337870.html 相关文章: 数字货币:未来金融的崭新篇章 USACO18DEC部分题 补题报告 聊一聊一些关于npm、pnpm、yarn的事 c语言多功能计算软件170 python图形化展示数据:保存为图片后查看 PostgreSQL入门到实战-第二十四弹 Spring Boot 统一功能处理(二) Flutter开发基础之动画专题 PHP 图片裁剪类封装 Android 14.0 SystemUI修改状态栏电池图标样式为横屏显示 FPGA:图像数字细节增强算法(工程+仿真+实物,可用毕设) Android netty的使用 苹果电脑启动磁盘是什么意思 苹果电脑磁盘清理软件 mac找不到启动磁盘 启动磁盘没有足够的空间来进行分区 【Java SE】多态 Yarn vs npm的大同小异Yarn是什么? 1.Godot引擎|场景|节点|GDS|介绍 springboot3 redis 实现分布式锁 2024年第十四届MathorCup数学应用挑战赛A题思路分享(妈妈杯) 运动听歌哪款耳机靠谱?精选五款热门开放式耳机 Kubernetes学习笔记12 Qt Designer 控件箱中的控件介绍及布局比列分配 蓝桥集训之三国游戏 MySQL知识整理 代码随想录算法训练营第36天| 435. 无重叠区间、 763.划分字母区间*、56. 合并区间 SpringBoot整合Nacos vue3 浅学 三小时使用鸿蒙OS模仿羊了个羊,附源码 如何使用 ArcGIS Pro 制作热力图 SpringBoot之集成Redis mybatis-plus与mybatis同时使用别名问题
1、变量定义 2、程序监控1 2、 程序监控2 3、程序监控3 机器人输送料和机构的动作安全尤为重要,下面我们讨论下安全联锁控制逻辑 4、相机拍照触发信号 5、相机拍照触发时序 查看全文 http://www.lryc.cn/news/337870.html 相关文章: 数字货币:未来金融的崭新篇章 USACO18DEC部分题 补题报告 聊一聊一些关于npm、pnpm、yarn的事 c语言多功能计算软件170 python图形化展示数据:保存为图片后查看 PostgreSQL入门到实战-第二十四弹 Spring Boot 统一功能处理(二) Flutter开发基础之动画专题 PHP 图片裁剪类封装 Android 14.0 SystemUI修改状态栏电池图标样式为横屏显示 FPGA:图像数字细节增强算法(工程+仿真+实物,可用毕设) Android netty的使用 苹果电脑启动磁盘是什么意思 苹果电脑磁盘清理软件 mac找不到启动磁盘 启动磁盘没有足够的空间来进行分区 【Java SE】多态 Yarn vs npm的大同小异Yarn是什么? 1.Godot引擎|场景|节点|GDS|介绍 springboot3 redis 实现分布式锁 2024年第十四届MathorCup数学应用挑战赛A题思路分享(妈妈杯) 运动听歌哪款耳机靠谱?精选五款热门开放式耳机 Kubernetes学习笔记12 Qt Designer 控件箱中的控件介绍及布局比列分配 蓝桥集训之三国游戏 MySQL知识整理 代码随想录算法训练营第36天| 435. 无重叠区间、 763.划分字母区间*、56. 合并区间 SpringBoot整合Nacos vue3 浅学 三小时使用鸿蒙OS模仿羊了个羊,附源码 如何使用 ArcGIS Pro 制作热力图 SpringBoot之集成Redis mybatis-plus与mybatis同时使用别名问题