工程(十一)——NUC11+D435i+VINS-FUSION+ESDF建图(github代码)
博主的合并代码
git@github.com:huashu996/VINS-FUSION-ESDFmap.git
一、D435i深度相机配置
1.1 SDK+ROS
参考我之前的博客,步骤和所遇见的问题已经写的很详细了
https://blog.csdn.net/HUASHUDEYANJING/article/details/129323834?spm=1001.2014.3001.5501
1.2 相机标定参数
1、相机内参
通过rostopic的camera/info获取
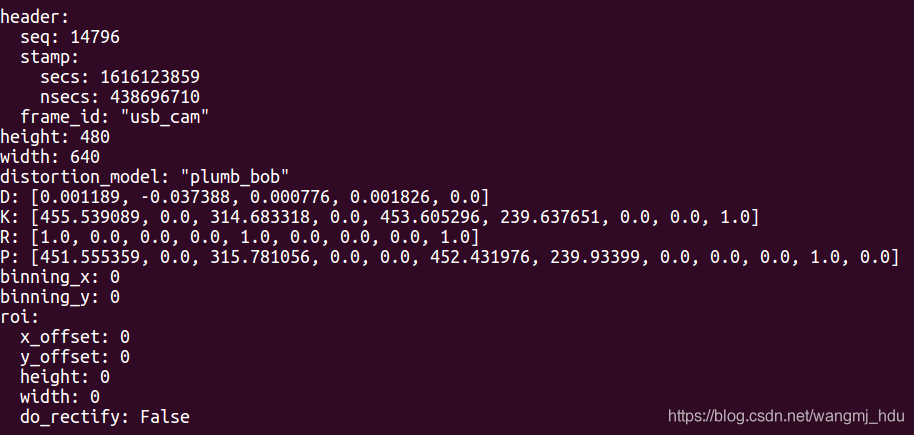
header:标准消息头
seq:序列ID,连续递增的ID号
stamp:两个时间戳
frame_id:与此数据相关联的帧ID
height:图像尺寸,height代表高度,(height*width)相机的分辨率,以像素为单位
width:图像尺寸,width代表宽度,(height*width)相机分辨率,以像素为单位
distortion_model:指定了相机畸变模型,对于大多数相机,"plumb_bob"简单的径向和切向畸变模型就足够了
D(distortion_parameters):畸变参数也叫失真系数,取决于畸变模型,(k1, k2, t1, t2, k3)
K:相机内参矩阵,使用焦距(fx, fy)和主点坐标(cx, cy),单位为像素,内参矩阵可以将相机坐标中的3D点投影到2D像素坐标,数据顺序(fx,cx,fy,cy,1)
R:旋转矩阵,将相机坐标系统对准理想的立体图像平面,使两张立体图像中的极线平行,仅对双目相机有效
P:投影矩阵,左边3*3矩阵是相机的内参矩阵,将相机坐标中的3D点投影到2D像素坐标,可能与相机内参K不同。对于单目相机Tx = Ty = 0。对于双目相机,Tx和Ty有所不同。
binning_x:图像下采样参数,水平方向
binning_y:图像下采样参数,竖直方向
(width / binning_x) x (height / binning_y)
下采样:binning_x = binning_y > 1。缩小图像,生成对应图像的缩略图,使得图像符合显示区域的大小。
roi:感兴趣区域定义,即完整图像上的一个矩形子窗口
2.相机外参标定
https://blog.csdn.net/qq_38364548/article/details/124917067
二、VINS-FUSION环境配置
2.1 重要环境配置如下
ubuntu18.04
ROS
pcl 1.7
opencv3
ceres-solver-1.14.0
整体环境配置还算简单要求不严格,间要说明以下。
ROS
sudo apt-get install ros-melodic-cv-bridge ros-melodic-tf ros-melodic-message-filters ros-melodic-image-transport ros-melodic-octomap*Ceres
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libeigen3-dev libgtest-dev
git clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver/
mkdir build
cd build
cmake ..
make
sudo make install代码安装
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash三、实际测试运行
3.1 D435I launch修改
为了启动IMU,双目摄像头
<launch><arg name="serial_no" default=""/><arg name="usb_port_id" default=""/><arg name="device_type" default=""/><arg name="json_file_path" default=""/><arg name="camera" default="camera"/><arg name="tf_prefix" default="$(arg camera)"/><arg name="external_manager" default="false"/><arg name="manager" default="realsense2_camera_manager"/><arg name="fisheye_width" default="640"/><arg name="fisheye_height" default="480"/><arg name="enable_fisheye" default="false"/><arg name="depth_width" default="640"/><arg name="depth_height" default="480"/><arg name="enable_depth" default="true"/><arg name="infra_width" default="640"/><arg name="infra_height" default="480"/><arg name="enable_infra1" default="true"/><arg name="enable_infra2" default="true"/><arg name="color_width" default="640"/><arg name="color_height" default="480"/><arg name="enable_color" default="true"/><arg name="fisheye_fps" default="30"/><arg name="depth_fps" default="30"/><arg name="infra_fps" default="30"/><arg name="color_fps" default="30"/><arg name="gyro_fps" default="200"/><arg name="accel_fps" default="250"/><arg name="enable_gyro" default="true"/><arg name="enable_accel" default="true"/><arg name="enable_pointcloud" default="false"/><arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/><arg name="pointcloud_texture_index" default="0"/><arg name="enable_sync" default="true"/><arg name="align_depth" default="true"/><arg name="publish_tf" default="true"/><arg name="tf_publish_rate" default="0"/><arg name="filters" default=""/><arg name="clip_distance" default="-2"/><arg name="linear_accel_cov" default="0.01"/><arg name="initial_reset" default="false"/><arg name="unite_imu_method" default="linear_interpolation"/><arg name="topic_odom_in" default="odom_in"/><arg name="calib_odom_file" default=""/><arg name="publish_odom_tf" default="true"/><arg name="allow_no_texture_points" default="false"/><arg name="emitter_enable" default="false"/><!-- rosparam set /camera/stereo_module/emitter_enabled false -->
<rosparam>/camera/stereo_module/emitter_enabled: 0
</rosparam><rosparam if="$(arg emitter_enable)">/camera/stereo_module/emitter_enabled: 1
</rosparam><group ns="$(arg camera)"><include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml"><arg name="tf_prefix" value="$(arg tf_prefix)"/><arg name="external_manager" value="$(arg external_manager)"/><arg name="manager" value="$(arg manager)"/><arg name="serial_no" value="$(arg serial_no)"/><arg name="usb_port_id" value="$(arg usb_port_id)"/><arg name="device_type" value="$(arg device_type)"/><arg name="json_file_path" value="$(arg json_file_path)"/><arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/><arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/><arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/><arg name="enable_sync" value="$(arg enable_sync)"/><arg name="align_depth" value="$(arg align_depth)"/><arg name="fisheye_width" value="$(arg fisheye_width)"/><arg name="fisheye_height" value="$(arg fisheye_height)"/><arg name="enable_fisheye" value="$(arg enable_fisheye)"/><arg name="depth_width" value="$(arg depth_width)"/><arg name="depth_height" value="$(arg depth_height)"/><arg name="enable_depth" value="$(arg enable_depth)"/><arg name="color_width" value="$(arg color_width)"/><arg name="color_height" value="$(arg color_height)"/><arg name="enable_color" value="$(arg enable_color)"/><arg name="infra_width" value="$(arg infra_width)"/><arg name="infra_height" value="$(arg infra_height)"/><arg name="enable_infra1" value="$(arg enable_infra1)"/><arg name="enable_infra2" value="$(arg enable_infra2)"/><arg name="fisheye_fps" value="$(arg fisheye_fps)"/><arg name="depth_fps" value="$(arg depth_fps)"/><arg name="infra_fps" value="$(arg infra_fps)"/><arg name="color_fps" value="$(arg color_fps)"/><arg name="gyro_fps" value="$(arg gyro_fps)"/><arg name="accel_fps" value="$(arg accel_fps)"/><arg name="enable_gyro" value="$(arg enable_gyro)"/><arg name="enable_accel" value="$(arg enable_accel)"/><arg name="publish_tf" value="$(arg publish_tf)"/><arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/><arg name="filters" value="$(arg filters)"/><arg name="clip_distance" value="$(arg clip_distance)"/><arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/><arg name="initial_reset" value="$(arg initial_reset)"/><arg name="unite_imu_method" value="$(arg unite_imu_method)"/><arg name="topic_odom_in" value="$(arg topic_odom_in)"/><arg name="calib_odom_file" value="$(arg calib_odom_file)"/><arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/><arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/></include></group>
</launch>3.2 单目+IMU
修改配置文件VINS-FUSION/src/VINS-Fusion-RGBD/config/realsense/realsense_d435i_config.yaml
主要修改相机的外参矩阵、内参矩阵、topic,不修改也能运行,漂移大。
roslaunch realsense2_camera rs_camera_vins.launch
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/realsense_d435i/realsense_d435i_config.yaml3.1 双目+IMU
修改配置文件VINS-FUSION/src/VINS-Fusion-RGBD/config/realsense/realsense_stereo_imu_config.yaml
主要修改两个相机的外参矩阵、内参矩阵、topic。
roslaunch realsense2_camera rs_camera_vins.launch
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/realsense_d435i/realsense_stereo_imu_config.yaml四、ESDF建图
4.1 下载代码编译
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/FIESTA
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash4.2 修改代码
1.修改launch
<launch><node pkg="fiesta" type="test_fiesta" name="fiesta" output="screen"required="true"><param name="resolution" value="0.05"/><param name="update_esdf_every_n_sec" value="0.1"/><!--Hash Table only--><param name="reserved_size" value="1000000"/><!--Array only--><param name="lx" value="-10.0"/><param name="ly" value="-10.0"/><param name="lz" value="-1"/><param name="rx" value="+10.0"/><param name="ry" value="+10.0"/><param name="rz" value="+3"/><!-- raycasting parameters --><param name="min_ray_length" value="0.5"/><param name="max_ray_length" value="5.0"/><!--If hash table is used, make sure the value is 0. In array implementation, 0 means no other thread.--><param name="ray_cast_num_thread" value="0"/><!-- needed when using depth image--><param name="center_x" value="381.91"/><param name="center_y" value="241.553"/><param name="focal_x" value="609.738"/><param name="focal_y" value="608.557"/><!-- probabilistic grid map --><param name="p_hit" value="0.70"/><param name="p_miss" value="0.35"/><param name="p_min" value="0.12"/><param name="p_max" value="0.97"/><param name="p_occ" value="0.80"/><!-- global / local --><param name="global_map" value="true"/><param name="global_update" value="true"/><param name="global_vis" value="true"/><param name="radius_x" value="3.0"/><param name="radius_y" value="3.0"/><param name="radius_z" value="1.5"/><!--depth_filter --><param name="use_depth_filter" value="true"/><param name="depth_filter_tolerance" value="0.1"/><param name="depth_filter_max_dist" value="10.0"/><param name="depth_filter_min_dist" value="0.1"/><!--unit: pixel--><param name="depth_filter_margin" value="0"/><!-- visulization --><!--0 for no visulize--><param name="visualize_every_n_updates" value="10"/><param name="slice_vis_max_dist" value="2.0"/><!-- relative to the lz if array is used, relative to the origin if hash table is used --><param name="slice_vis_level" value="1.6"/><param name="vis_lower_bound" value="0"/><param name="vis_upper_bound" value="+10"/><!-- subsribe source --><remap from="~depth" to="/camera/depth/image_rect_raw"/><remap from="~transform" to="/vins_estimator/camera_pose"/></node><node name="rvizvisualisation" pkg="rviz" type="rviz" output="log" args="-d $(find fiesta)/demo.rviz" />
</launch>2.修改主函数
FIESTA-master/src/FIESTA/test/test_fiesta.cpp,默认是点云输入格式。
#include "Fiesta.h"int main(int argc, char **argv) {ros::init(argc, argv, "FIESTA");ros::NodeHandle node("~");//fiesta::Fiesta<sensor_msgs::PointCloud2::ConstPtr, geometry_msgs::TransformStamped::ConstPtr> esdf_map(node);fiesta::Fiesta<sensor_msgs::Image::ConstPtr, nav_msgs::Odometry::ConstPtr> esdf_map(node);fiesta::Fiesta<sensor_msgs::Image::ConstPtr, nav_msgs::Odometry::ConstPtr> esdf_map(node);ros::spin();return 0;
}4.3 运行
roslaunch fiesta D435i.launch运行效果图
双目
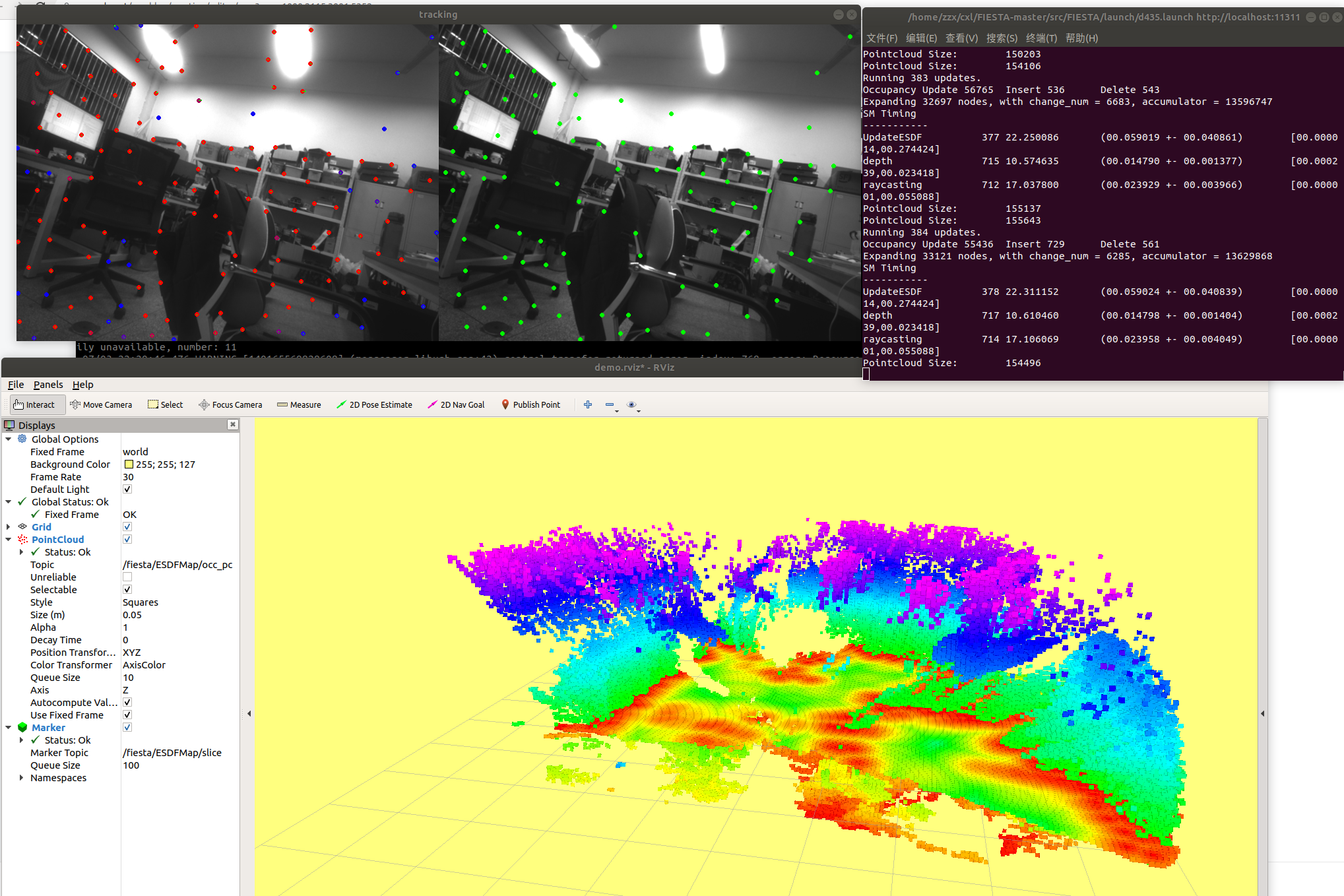
单目
