基于半车悬架的轴距预瞄与轴间预瞄仿真对比
目录
前言
1. 半车悬架模型
2.轴距预瞄(单点预瞄)和轴间预瞄(两点预瞄)原理与仿真分析
2.1轴距预瞄(单点预瞄)
2.1.1预瞄原理
2.2.轴间预瞄(两点预瞄)
2.2.1预瞄原理
2.3仿真分析
3.总结
前言
对于悬架而言,四个车轮实际的输入信息是受到前后延时以及左右相干的,以及我们前车轮走过的路面实际上可以作为后车轮输入的已知信息,或者利用质心与后轮的关系,可以得到已知的后轮激励信息,可以改善悬架的性能指标。
对于目前的文献主要有轴距预瞄(单点预瞄)和轴间预瞄(两点预瞄),本篇将以前后半车(俯仰)悬架进行仿真分析,剖析预瞄的作用和原理所在,这里以半车模型为例:
1. 半车悬架模型
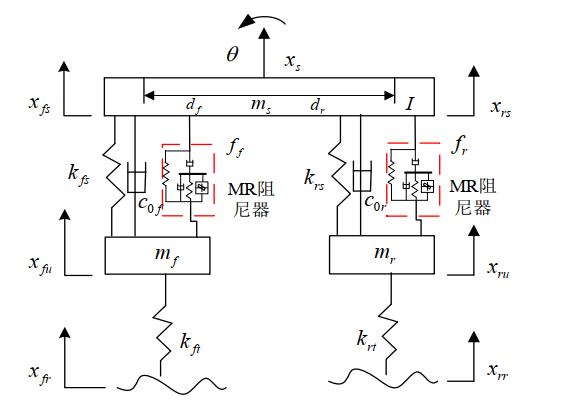
其中, ms、 xs、 xfs、 xrs 分别为簧载质量及其质心、 前端、后端的垂向位移; mf、 xfu 分别为前悬架非簧载质量及其垂向位移; mr、 xru 分别为后悬架非簧载质量及其垂向位移; θ为俯仰角, I 为转动惯量; kfs、 c0f 分别为前悬架的弹簧刚度和不可调阻尼系数; krs、 c0r 分别为后悬架的弹簧刚度和不可调阻尼系数; kft、 krt 分别为前、 后轮胎刚度; ff、 fr 分别为前、后悬架的可调阻尼力; xfr、 xrr 分别为前、 后轮路面激励; df、 dr 分别为前、 后轮到质心的距离。
假设俯仰角很小θ,车身的绝对位移和速度近似为:
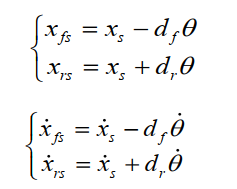
所以前后轮四自由度 1/2 车半主动悬架系统的动力学方程可表示为:

对于其它类型的悬架建模可了解往期链接:
半车(前后、左右)、整车悬架详细推导建模和simulink仿真分析_半车模型的最小实现_Mr. 邹的博客-CSDN博客
2.轴距预瞄(单点预瞄)和轴间预瞄(两点预瞄)原理与仿真分析
2.1轴距预瞄(单点预瞄)
2.1.1预瞄原理
利用传感器的信息可以获得前轮路面激励信息:

但是对于后轮信息可以通过前轮延时手段获得,虽然传感器传输信息有时间戳,但是认为Δt≈0,所以可以认为x01即为前轮路面激励。
2.2.轴间预瞄(两点预瞄)
2.2.1预瞄原理
同理可以通过传感器信息获得前轮位移信息,后轮的路面位移输入是前轮处延迟以及后轮与前轮轴之间某点(可以理解为质心)处延迟的路面位移信号的某种组合

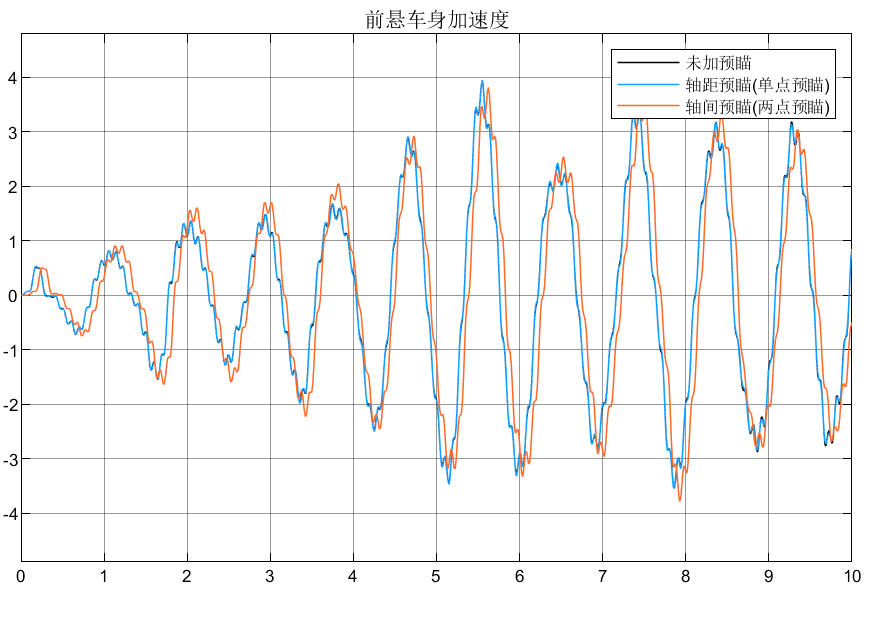
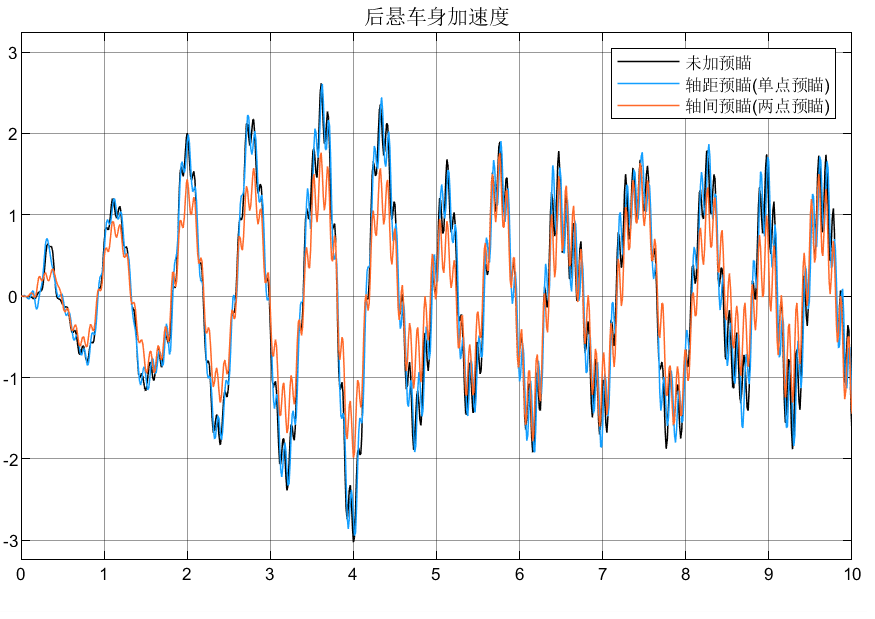
2.3仿真分析
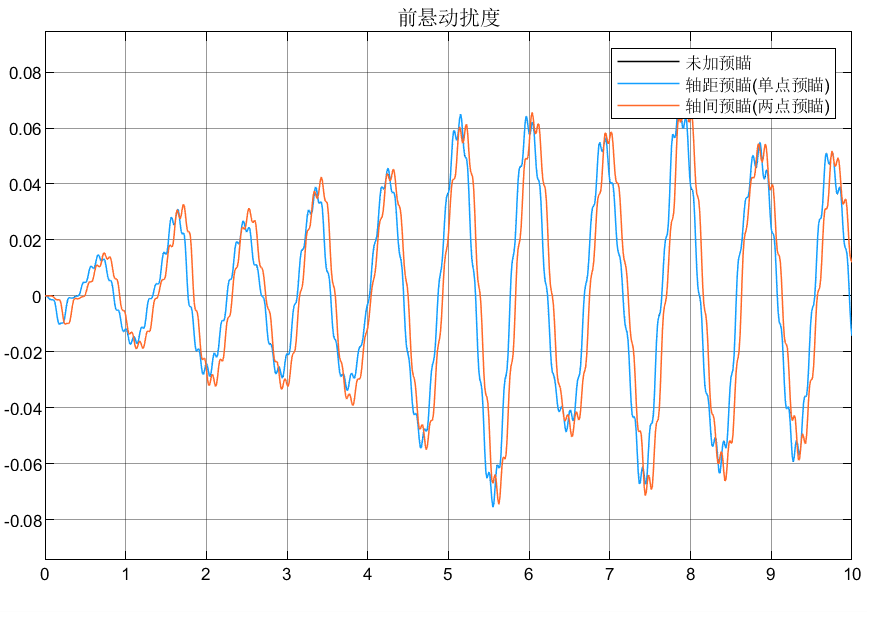
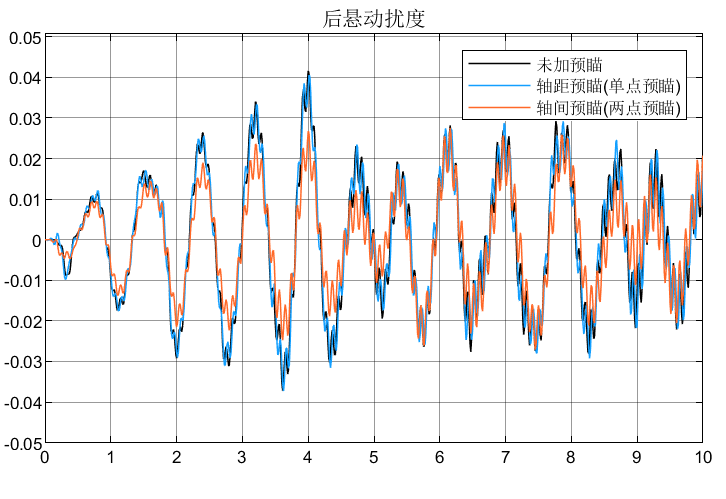
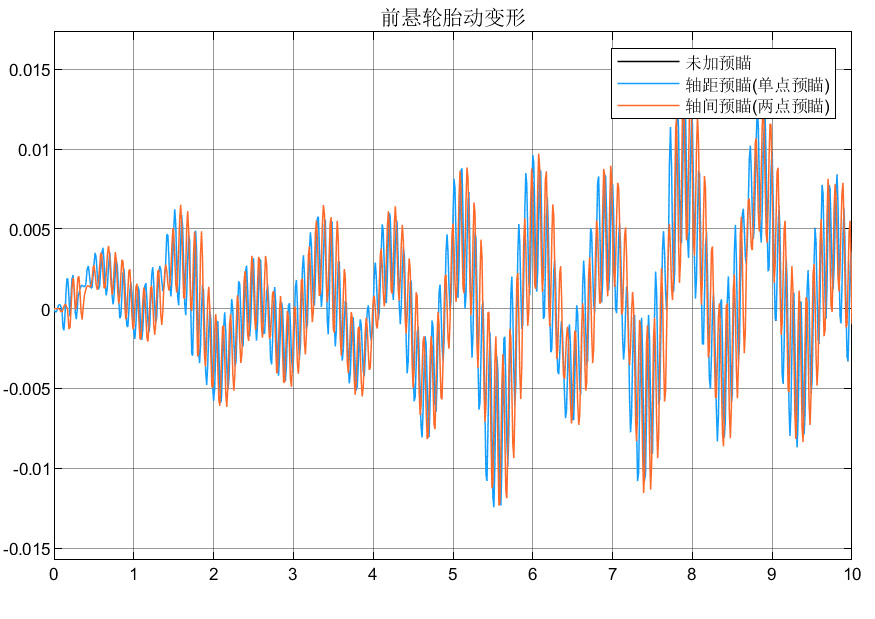
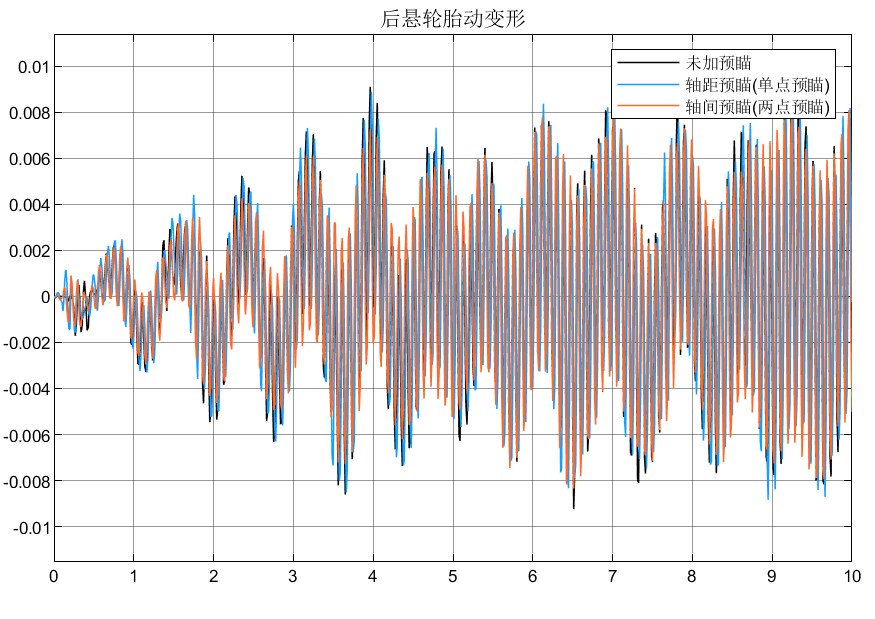
3.总结
①可以看到后悬由于有预瞄,所以相对于前悬的性能指标有所改善;
②轴间预瞄由于可以调节权系数,所以相对于轴距预瞄表现更好。