【FMCW 03】测速
从上一讲 测距 末尾的frame讲起。我们知道一个chirp对应了一个采样后的IF信号,我们将这些采样后的IF信号按chirp的次序排列成一个帧(frame),这就得到了我们实际中接收后处理的FMCW信号。
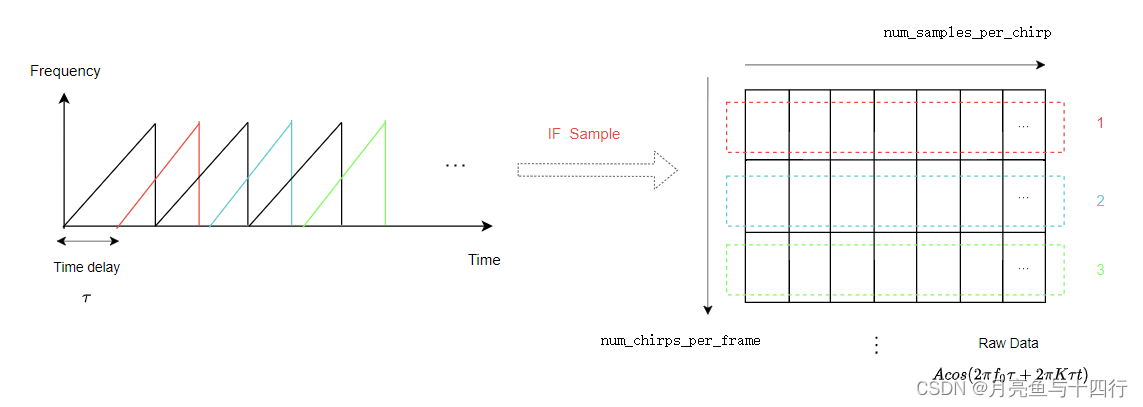
由于chirp的发射返回时间很短,所以我们称其所在时间维度为快时间(fast time)维,而相邻的chirp间存在一个chirp repetition time(CRT)相对较慢,于是我们将其所在时间维度为慢时间(slow time)维。借一幅《Soli: Ubiquitous Gesture Sensing with Millimeter》文中的图,可以对raw signal有一个直观的认识。

相位差的周期性
我们首先对FFT得到的频率谱做一个分析,其分为两部分,幅度部分和相位部分,幅度部分可以表示此处频率的强弱,相位部分表示的是此频率对应的相位。那么,对于,对做完range FFT后的frame矩阵而言,其fast time维度就转换成了range维度。
对于在某一个 range bin上的物体,我们已经知道其距离表示为
dtarget=c2Kfpeakd_{target} = \frac{c}{2K}f_{peak} dtarget=2Kcfpeak
这个距离的解我们知道是通过IF信号中频率部分2πKτ2 \pi K \tau2πKτ得到的,而我们现在关注其相位部分2πf0τ2 \pi f_0 \tau2πf0τ。
xIF(t)=Acos(2πKτt+2πfoτ)x_{\tiny{IF}}(t) = A \cos(2\pi K\tau t+2\pi f_o \tau ) xIF(t)=Acos(2πKτt+2πfoτ)
由于
τ=2dc\tau = \frac{2d}{c} τ=c2d
故相位ϕ\phiϕ
ϕ=2πfo2dc=4πfocd\phi = 2\pi f_o \frac{2d}{c}=\frac{4\pi f_o}{c}d ϕ=2πfoc2d=c4πfod

如果在这个range bin中的物体正在运动,那么每隔一个chirp的周期CRTCRTCRT,物体就会发生一个微动位移,而这个微动位移将造成相位较为剧烈的变化,即
Δϕ=4πfocΔd=4πf0cv⋅CRT\Delta \phi = \frac{4\pi f_o}{c} \Delta d =\frac{4\pi f_0}{c}v \cdot CRT Δϕ=c4πfoΔd=c4πf0v⋅CRT
如果我们将这个CRTCRTCRT看作一种采样,那么,对ϕ\phiϕ的变化进行分析,将能提取到有效的速度vvv的信息,这也正是我们采用frame传输的原因——获得速度信息。 这种视角先按下不表,最后再述。

我们也可将这个过程看作是相位差的周期性运动,那么我们对其进行FFT分析,也将得到这个周期性的相位差信息。
进一步转换到速度维,就有
v=c4πfo⋅CRTΔϕ=λ4π⋅CRTΔϕv = \frac{c}{4\pi f_o \cdot CRT}\Delta \phi =\frac{\lambda}{4 \pi \cdot CRT}\Delta \phi v=4πfo⋅CRTcΔϕ=4π⋅CRTλΔϕ
于是我们要做的Doppler FFT 或者说 Velocity FFT即是取出Range FFT某个range bin对应的一列slow time数据进行FFT。

多普勒效应
那么问题来了,为什么叫Doppler FFT呢?在基本的物理学中,我们曾学习过基本的多普勒效应。举一个生活中的例子,你在街上听到一辆警车向你呼啸而来,你听到警笛的声音是越来越急的(这对应的即是声波的频率越来越高),而当警车越来越远时,你听的警笛是越来越疏的(这对应的即是声波的频率越来越低)。
在这里,我们用一个移动通信中描述移动台所造成的多普勒频偏公式(见Rappaport书中的123页),即
fd=vλcosθf_d = \frac{v}{\lambda}\cos \theta fd=λvcosθ
在FMCW雷达考虑的场景中,取径向速度,即 cosθ=1\cos \theta = 1cosθ=1,同时由于电波一发一收,于是造成的fdf_dfd为
fd=2vλf_d = 2\frac{v}{\lambda} fd=2λv
进一步代入 v 的公式转换为
fd=Δϕ2π⋅CRTf_d = \frac{\Delta \phi}{2 \pi \cdot CRT} fd=2π⋅CRTΔϕ
值得指出的是,主频率部分亦会由于物体的运动产生频偏。但当物体的距离d发生微小的变化时,IF signal 信号的相位变化非常明显,而频率的变化并不显著,远远达不到在CRT的时间内,区分信号的频率。 即相位变化对微动位移有着敏感性。
我们不如用TI教程中的例子来感性认识一下:取 λ=4mm\lambda = 4mmλ=4mm,CRT=40μsCRT = 40 \mu sCRT=40μs,K=50MHz/μsK = 50MHz/\mu sK=50MHz/μs,当物体发生一个1mm的微动位移时,有:
相位变化 Δϕ=4πΔdλ=π=180∘相位变化 \ \Delta \phi = \frac{4 \pi \Delta d}{\lambda} =\pi =180^{\circ} 相位变化 Δϕ=λ4πΔd=π=180∘
频率变化 Δf=2KcΔd=333Hz频率变化 \ \Delta f = \frac{2K}{c} \Delta d=333Hz 频率变化 Δf=c2KΔd=333Hz
而这个频偏在slow time的频率轴引起的变化其实并不大,即
Δf⋅CRT=333×40×10−6=0.013cycles\Delta f \cdot CRT=333\times 40 \times 10 ^{-6} = 0.013 \ cycles Δf⋅CRT=333×40×10−6=0.013 cycles
最大速度与速度分辨率
最大速度
由于Δϕ\Delta \phiΔϕ 的限制,给出了最大速度的限制,即
−π<Δϕ<π-\pi < \Delta \phi < \pi −π<Δϕ<π
于是
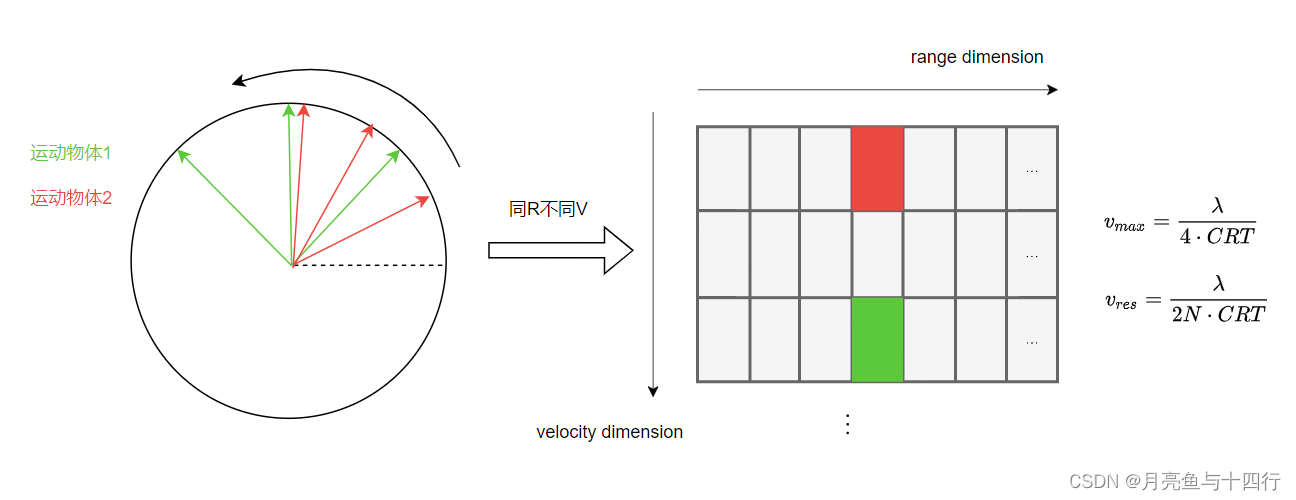
−λ4⋅CRT<v<λ4⋅CRT-\frac{\lambda}{4 \cdot CRT} < v <\frac{\lambda}{4 \cdot CRT} −4⋅CRTλ<v<4⋅CRTλ
感性认识一下,比如用 5mm5mm5mm 的毫米波雷达,再用 100μs100 \mu s100μs 的CRT,此时能达到的最大速度为
vmax=λ4⋅CRT=12.5m/sv_{max} = \frac{\lambda}{4 \cdot CRT} =12.5m/s vmax=4⋅CRTλ=12.5m/s
速度分辨率
继续借用TI教程里的一张图(这里定义 ω=Δϕ\omega = \Delta \phiω=Δϕ),容易发现,速度分辨率与我们的在数字域上的角速度分辨率有关,由于
Δω=2πNradians/sample=1Ncycles/sample\Delta \omega = \frac{2\pi}{N} \ radians/sample=\frac{1}{N} \ cycles/sample Δω=N2π radians/sample=N1 cycles/sample

于是就有
Δv=λ4π⋅CRTΔω=λ2N⋅CRT\Delta v = \frac{\lambda}{4 \pi \cdot CRT} \Delta \omega = \frac{\lambda}{2N \cdot CRT} Δv=4π⋅CRTλΔω=2N⋅CRTλ
仍用最大速度中的测算数据,并取 N = 512,我们感性认识到此时的速度分辨率为:
vres=λ2N⋅CRT=0.0488m/sv_{res} = \frac{\lambda}{2N \cdot CRT}=0.0488m/s vres=2N⋅CRTλ=0.0488m/s
基于CRT的采样视角
如果我们基于CRT的采样视角去理解这个相位变化,那么对于式子
Δϕ=4πfocΔd=4πf0cv⋅CRT\Delta \phi = \frac{4\pi f_o}{c} \Delta d =\frac{4\pi f_0}{c}v \cdot CRT Δϕ=c4πfoΔd=c4πf0v⋅CRT
我们两边同除 CRTCRTCRT,就有:
ΔϕCRT=4πf0cv\frac{\Delta \phi}{CRT}=\frac{4\pi f_0}{c}v CRTΔϕ=c4πf0v
根据微分学的知识,我们知道左边可理解为对ϕ\phiϕ的微分,即
w=dϕdt=2πfpeakw = \frac{d\phi}{dt} = 2\pi f_{peak} w=dtdϕ=2πfpeak
于是就有:
fpeak=2vλf_{peak} = 2\frac{v}{\lambda} fpeak=2λv
这个式子说明,从频率轴去看,此时直接测得的就是多普勒频偏。进一步就有:
v=λ2fpeakv =\frac{\lambda}{2 } f_{peak} v=2λfpeak
由于此时 CRTCRTCRT 的倒数即是我们等效的采样率。于是,频率分辨率的范围就在
−12⋅CRT<fpeak<12⋅CRT-\frac{1}{2 \cdot CRT} <f_{peak}<\frac{1}{2\cdot CRT} −2⋅CRT1<fpeak<2⋅CRT1
于是,可得速度的测量范围为
−λ4⋅CRT<v<λ4⋅CRT-\frac{\lambda}{4 \cdot CRT} < v <\frac{\lambda}{4 \cdot CRT} −4⋅CRTλ<v<4⋅CRTλ
和速度的分辨率
vres=λ2fres=λ2N⋅CRTv_{res} =\frac{\lambda}{2 } f_{res} = \frac{\lambda}{2N \cdot CRT} vres=2λfres=2N⋅CRTλ
这种视角个人兴趣所至,以增参考。最后,同样用一张图结束本节的内容。