ROS开发基础-Linux基础第四部(开发板设置本地IP)
一 、网线连接设备
使用网线连接jetson NX与机械臂,如下图所示:

二、 修改上位机IPV4 IP
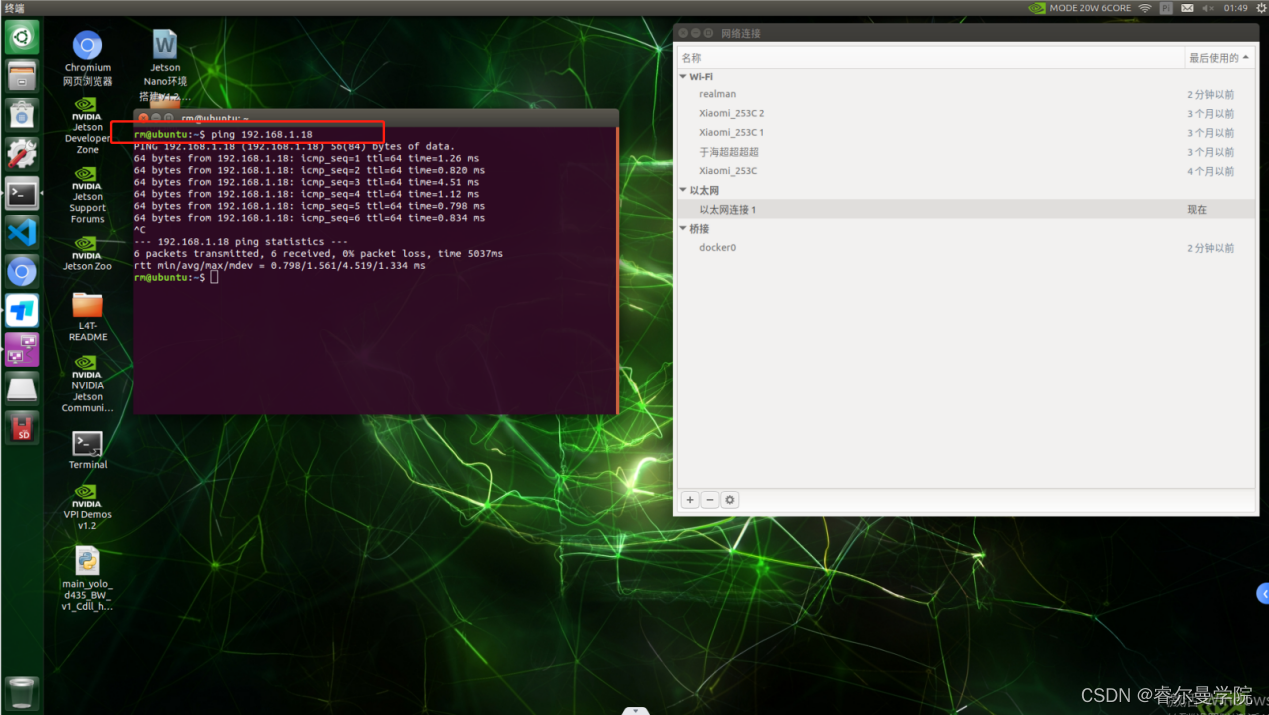
①测试是否可连接。网线连接机械臂之后,在桌面打开终端输入命令“ping 192.168.1.18”,如不可正常通信,可按照下述步骤进行设置。
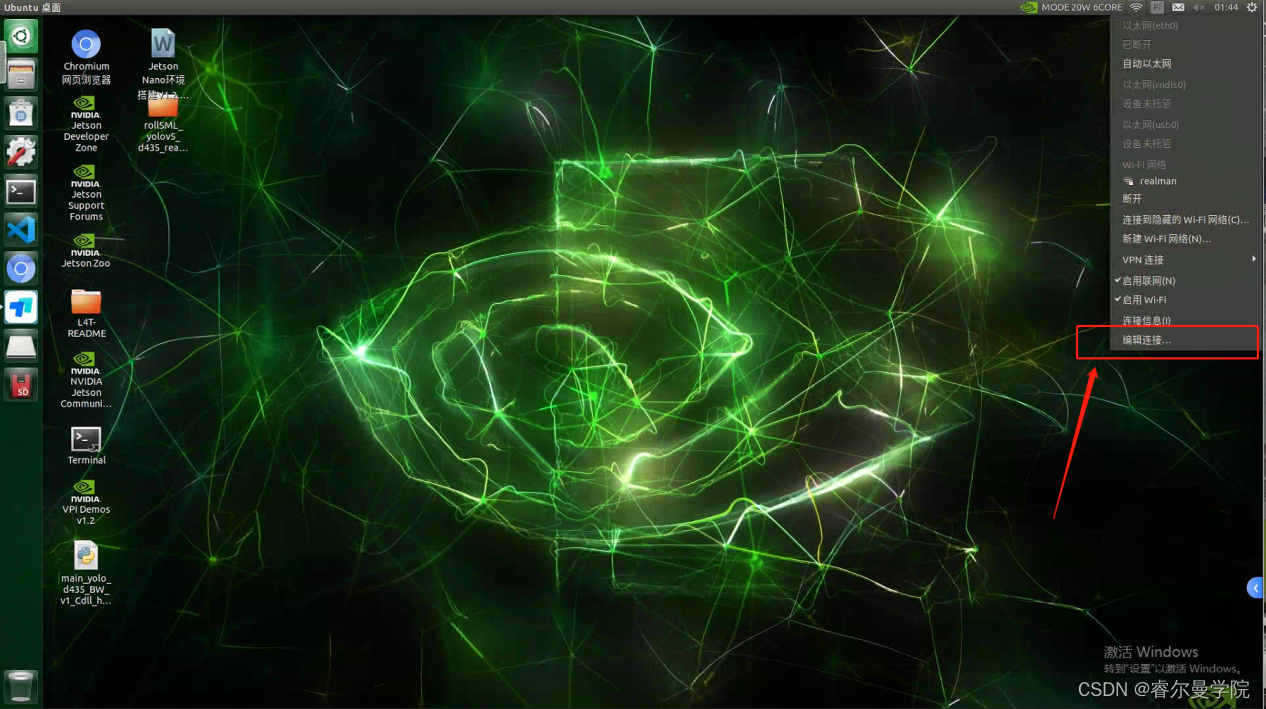
②在Ubuntu桌面点击网络,打开“编辑连接”界面。
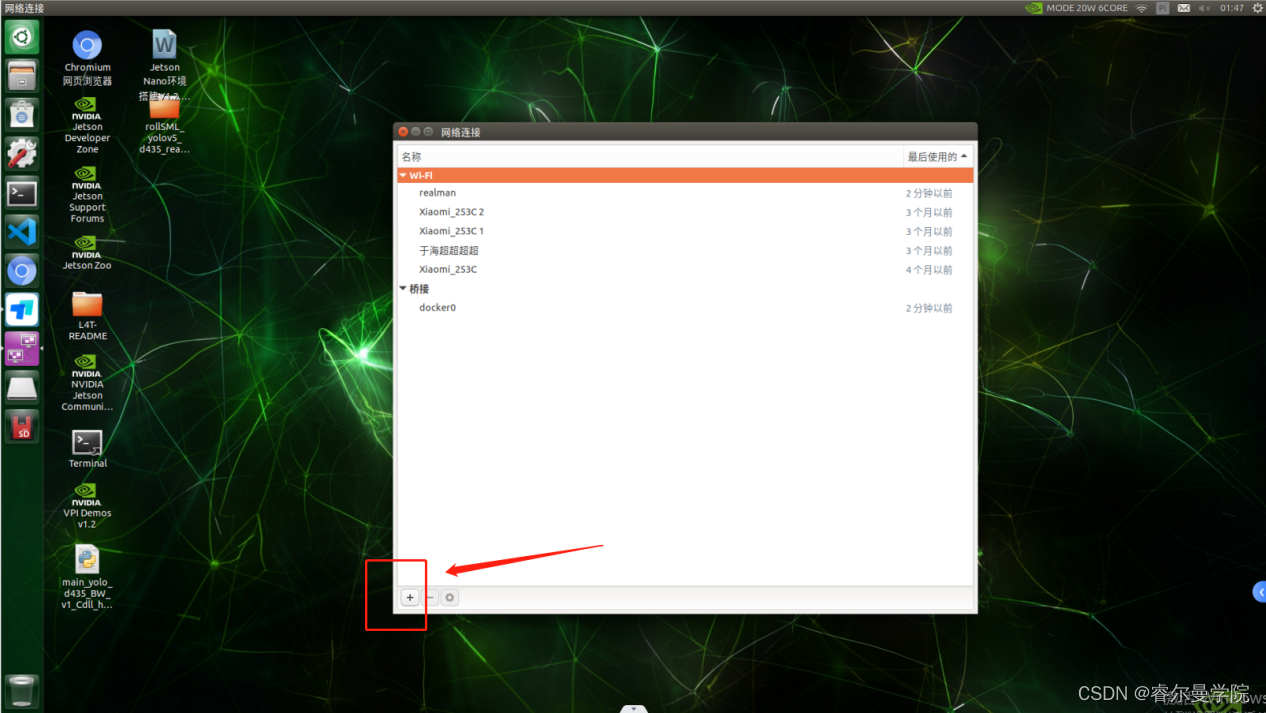
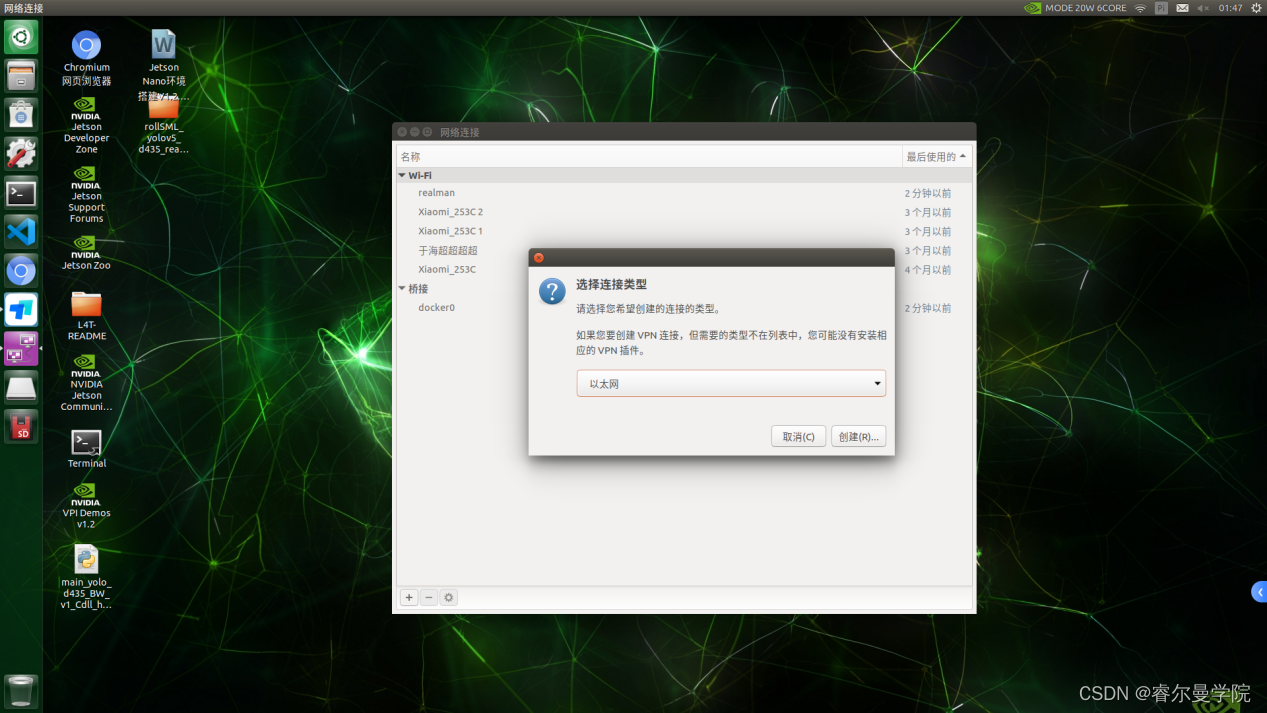
③单击“编辑连接”界面左下角“+”号按钮,添加“以太网”类型。
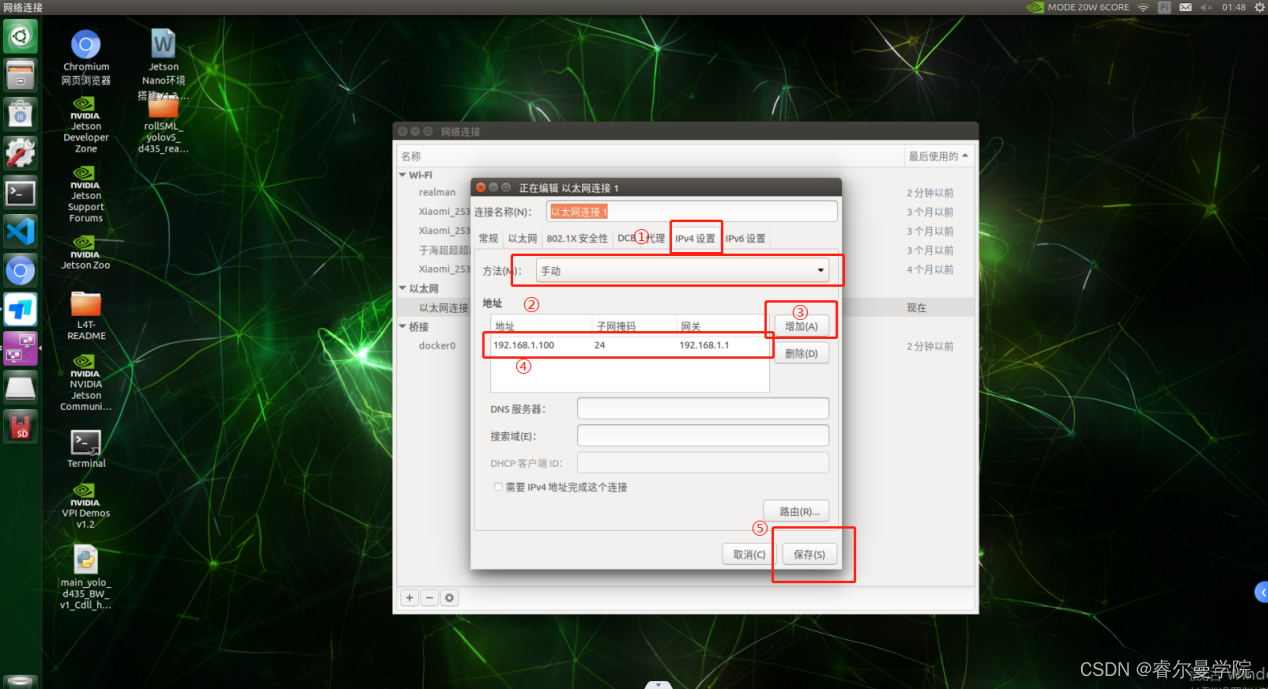
④双击打开以太网编辑界面,依次选择“IPV4设置”-->“手动设置IP”-->“增加”-->填写IP及网关信息-->“保存设置”。
⑤桌面打开终端,输入“ping 192.168.1.18”,此时终端输出为下图所示,说明连接成功。