【兔子机器人】五连杆运动学解算与VMC(virtual model control)
VMC (virtual model control,虚拟模型控制) 是一种直觉控制方式,其关键是在每个需要控制的自由度上构造恰当的虚拟构件以产生合适的虚拟力。虚拟力不是实际执行机构的作用力或力矩,而是通过执行机构的作用经过机构转换而成。对于一些控制问题,我们可能需要将工作空间 (Task Space) 的力或力矩映射成关节空间 (Joint Space) 的关节力矩。
上交开源:
WBR腿部五连杆机构分析
file:///E:/%E6%95%99%E7%A0%94%E5%AE%A4%E9%A1%B9%E7%9B%AE/%E5%85%94%E5%AD%90%E6%9C%BA%E5%99%A8%E4%BA%BA/%E4%B8%8A%E6%B5%B7%E4%BA%A4%E9%80%9A%E5%A4%A7%E5%AD%A6RoboMaster2023%E5%B9%B3%E8%A1%A1%E6%AD%A5%E5%85%B5%E6%8E%A7%E5%88%B6%E7%B3%BB%E7%BB%9F%E5%BC%80%E6%BA%90/WBR_leg.html
五连杆运动学解算与VMC - 韭菜的菜的文章 - 知乎
https://zhuanlan.zhihu.com/p/613007726
【五连杆运动学解算与VMC】 https://www.bilibili.com/video/BV1Hk4y1h7r8/?share_source=copy_web&vd_source=77e36f24add8dc77c362748ffb980148
正运动学解算得出的结果非常复杂(利用MATLAB计算),在单片机这种平台算力不足
VMC解算的结果相对简单很多,可以在单片机上面运行
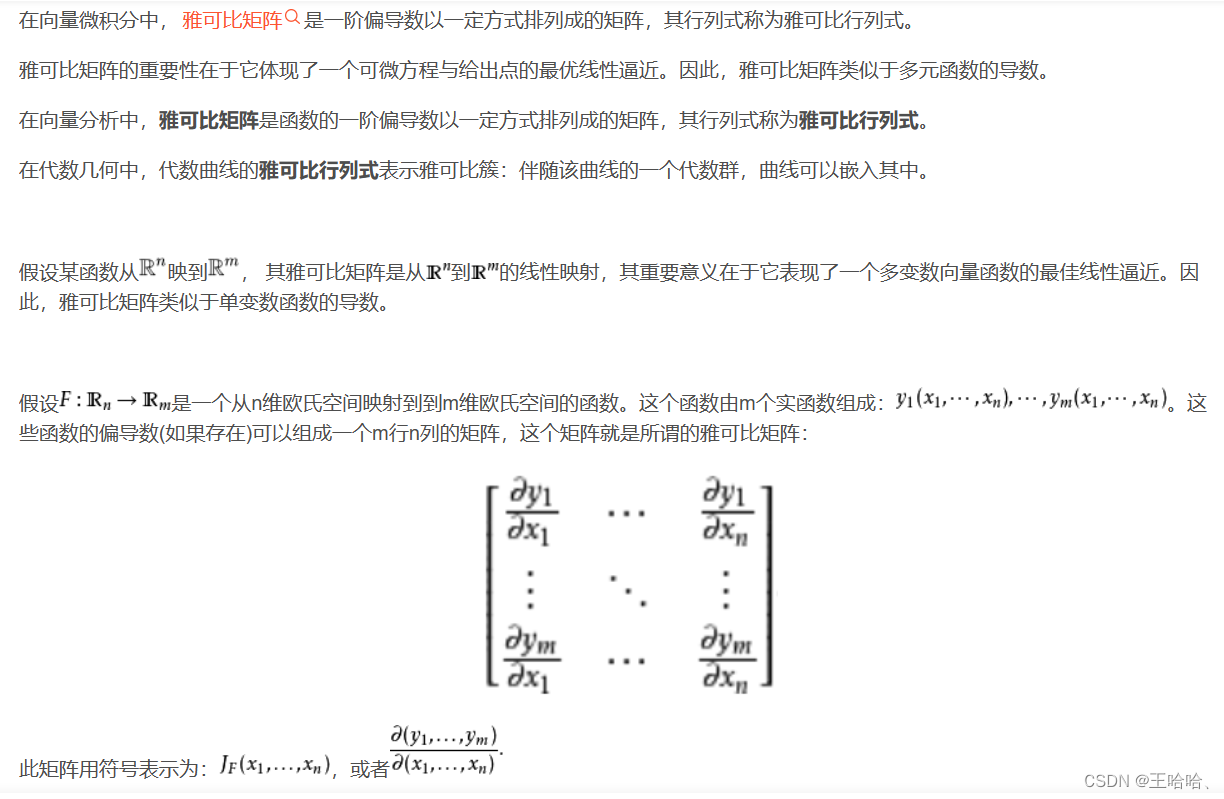
什么是Jacobian矩阵(雅克比矩阵)
http://t.csdnimg.cn/7Vv08