当前位置: 首页 > news >正文 自动驾驶框架:自动驾驶汽车定位-感知-规划-决策-控制概述,按照我的架构图理解:决策决定的是速度,规划决定的是路径(架构理解推荐) news 2025/9/10 7:14:15 1.按照我的架构图理解:决策决定的是速度,规划决定的是路径 参考链接:【自动驾驶】运动规划丨速度规划丨自动驾驶速度规划及状态协调方法 2.下面是参考别人的理解: 自动驾驶汽车定位-感知-规划-决策-控制概述 规划-决策-控制知识 参考链接: https://blog.csdn.net/weixin_42301220/article/details/124832403 https://github.com/CHH3213/chhRobotics 查看全文 http://www.lryc.cn/news/307521.html 相关文章: Gemma 淘宝关键词搜索API、搜索商品接口、商品价格监控 vue实现水印功能 记录一下我的Ruby On Rails的systemd服务脚本 【计算机网络】传输层——TCP和UDP详解 stm32和嵌入式linux可以同步学习吗? maven--->maven中的<properties>属性有什么作用? android 网络请求总结 用 Python 自动化处理无聊的事情 稀疏计算、彩票假说、MoE、SparseGPT Git Windows安装教程 iOS高级理论:Runtime应用 php判断和过滤get或者post的html标签,防止跨站点脚本(XSS),链接注入,框架注入等攻击 PySide6实现课堂点名程序 瑞_Redis_Redis命令 js 算法题 在数组中找出和为目标值 target 的那 两个 整数,并返回它们的数组下标 基于springboot接口的编写 【HarmonyOS】鸿蒙开发之Video组件——第3.7章 React引入css的几种方式以及应用 [算法沉淀记录] 排序算法 —— 冒泡排序 【机器人最短路径规划问题(栅格地图)】基于遗传算法求解 如何做代币分析:以 TRX 币为例 关于地址引用与值引用的坑 初谈软件工程(一) 自动化开展思路 安装使用zookeeper nginx实现http反向代理及负载均衡 vue组件中data为什么必须是一个函数 科技论文编写思路 Windows虚拟机克隆后修改SID
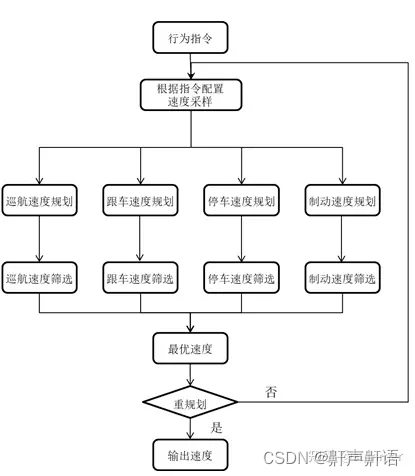
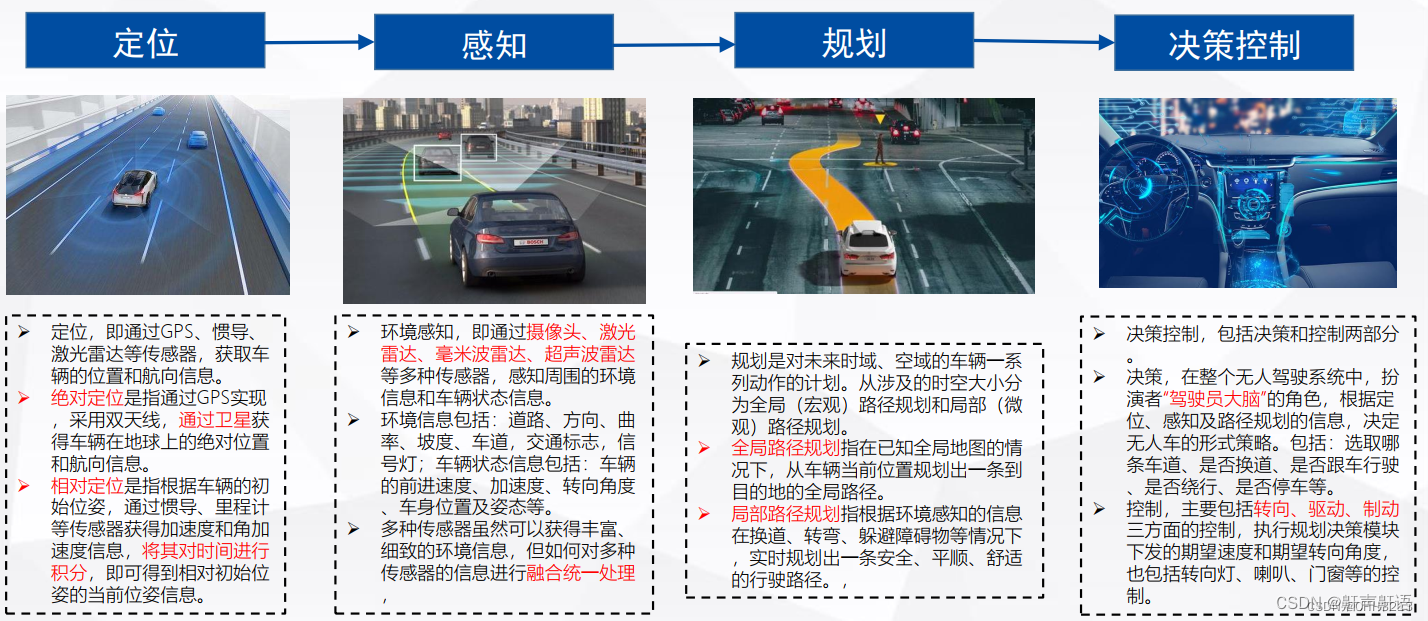
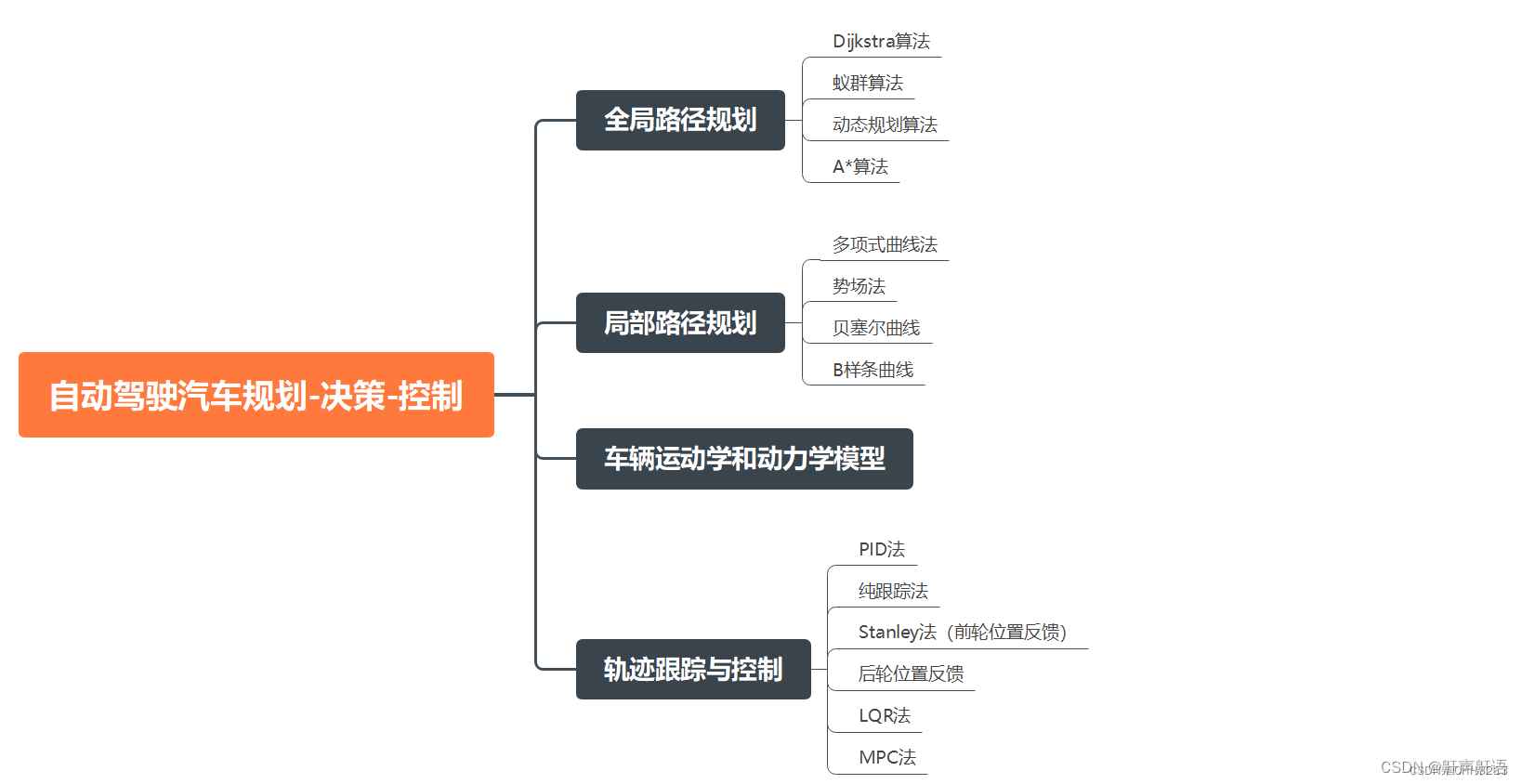
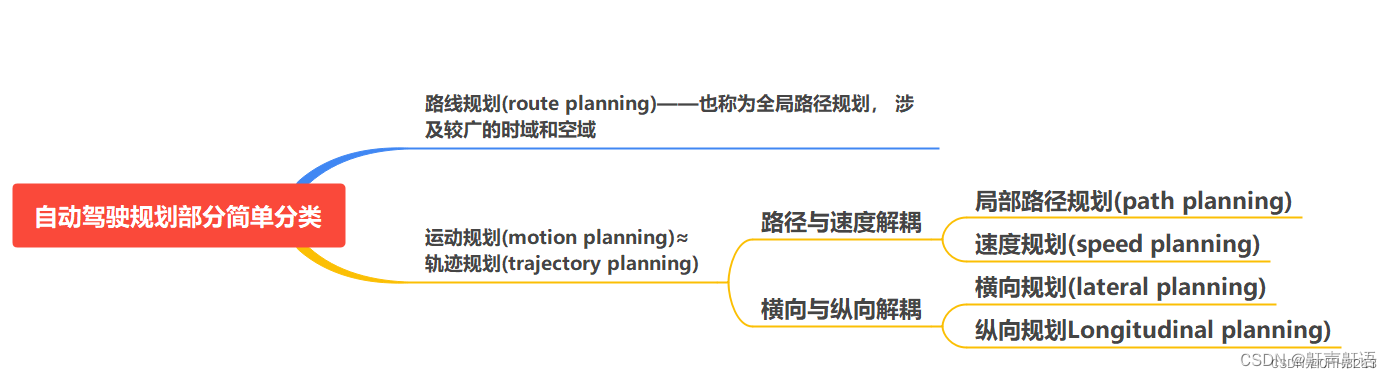
1.按照我的架构图理解:决策决定的是速度,规划决定的是路径 参考链接:【自动驾驶】运动规划丨速度规划丨自动驾驶速度规划及状态协调方法 2.下面是参考别人的理解: 自动驾驶汽车定位-感知-规划-决策-控制概述 规划-决策-控制知识 参考链接: https://blog.csdn.net/weixin_42301220/article/details/124832403 https://github.com/CHH3213/chhRobotics 查看全文 http://www.lryc.cn/news/307521.html 相关文章: Gemma 淘宝关键词搜索API、搜索商品接口、商品价格监控 vue实现水印功能 记录一下我的Ruby On Rails的systemd服务脚本 【计算机网络】传输层——TCP和UDP详解 stm32和嵌入式linux可以同步学习吗? maven--->maven中的<properties>属性有什么作用? android 网络请求总结 用 Python 自动化处理无聊的事情 稀疏计算、彩票假说、MoE、SparseGPT Git Windows安装教程 iOS高级理论:Runtime应用 php判断和过滤get或者post的html标签,防止跨站点脚本(XSS),链接注入,框架注入等攻击 PySide6实现课堂点名程序 瑞_Redis_Redis命令 js 算法题 在数组中找出和为目标值 target 的那 两个 整数,并返回它们的数组下标 基于springboot接口的编写 【HarmonyOS】鸿蒙开发之Video组件——第3.7章 React引入css的几种方式以及应用 [算法沉淀记录] 排序算法 —— 冒泡排序 【机器人最短路径规划问题(栅格地图)】基于遗传算法求解 如何做代币分析:以 TRX 币为例 关于地址引用与值引用的坑 初谈软件工程(一) 自动化开展思路 安装使用zookeeper nginx实现http反向代理及负载均衡 vue组件中data为什么必须是一个函数 科技论文编写思路 Windows虚拟机克隆后修改SID