当前位置: 首页 > news >正文 【机器人最短路径规划问题(栅格地图)】基于遗传算法求解 news 2025/9/10 7:11:48 基于遗传算法求解机器人最短路径规划问题(栅格地图)的仿真结果 仿真结果: 路径长度的变化曲线: 遗传算法优化后的机器人避障路径: 查看全文 http://www.lryc.cn/news/307500.html 相关文章: 如何做代币分析:以 TRX 币为例 关于地址引用与值引用的坑 初谈软件工程(一) 自动化开展思路 安装使用zookeeper nginx实现http反向代理及负载均衡 vue组件中data为什么必须是一个函数 科技论文编写思路 Windows虚拟机克隆后修改SID 前端架构: 脚手架工具rxjs的快速上手应用 小程序框架(概念、工作原理、发展及应用) 音视频数字化(数字与模拟-电影) 在 Ubuntu 中, 使用 fsck 命令来修复磁盘文件系统 LED电子显示屏连接方式解析 Mysql运维篇(五) 部署MHA--主机环境配置 Offer必备算法09_分治快排_四道力扣OJ(快排三路划分) Linux下性能分析的可视化图表工具 泽攸科技JS系列高精度台阶仪在半导体领域的应用 c++实现栈和队列类 MySQL优化之索引下推 【Java程序设计】【C00338】基于Springboot的银行客户管理系统(有论文) C语言中大小写字母的转化 Camunda7.18流程引擎启动出现Table ‘camunda_platform_docker.ACT_GE_PROPERTY‘的解决方案 红队打靶:DR4G0N B4LL打靶思路详解(vulnhub) SQL Server添加用户登录 pytest如何在类的方法之间共享变量? 配置前端项目到 github-pages VSCode使用教程 vscode——本地配置(C和C++环境配置)(2) 【从零开始学习重要知识点 | 第一篇】快速了解什么是幂等性以及常见解决方案
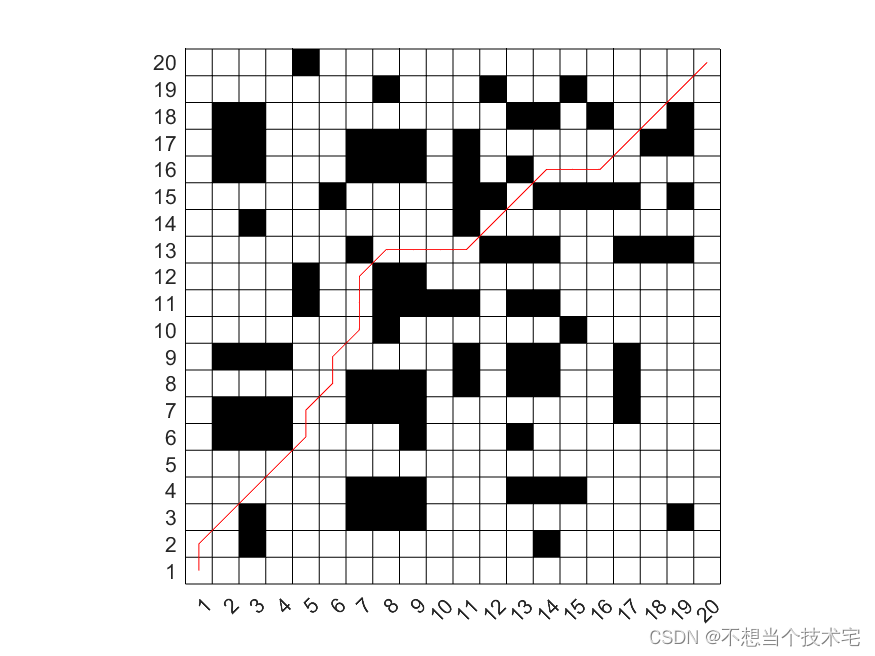
基于遗传算法求解机器人最短路径规划问题(栅格地图)的仿真结果 仿真结果: 路径长度的变化曲线: 遗传算法优化后的机器人避障路径: 查看全文 http://www.lryc.cn/news/307500.html 相关文章: 如何做代币分析:以 TRX 币为例 关于地址引用与值引用的坑 初谈软件工程(一) 自动化开展思路 安装使用zookeeper nginx实现http反向代理及负载均衡 vue组件中data为什么必须是一个函数 科技论文编写思路 Windows虚拟机克隆后修改SID 前端架构: 脚手架工具rxjs的快速上手应用 小程序框架(概念、工作原理、发展及应用) 音视频数字化(数字与模拟-电影) 在 Ubuntu 中, 使用 fsck 命令来修复磁盘文件系统 LED电子显示屏连接方式解析 Mysql运维篇(五) 部署MHA--主机环境配置 Offer必备算法09_分治快排_四道力扣OJ(快排三路划分) Linux下性能分析的可视化图表工具 泽攸科技JS系列高精度台阶仪在半导体领域的应用 c++实现栈和队列类 MySQL优化之索引下推 【Java程序设计】【C00338】基于Springboot的银行客户管理系统(有论文) C语言中大小写字母的转化 Camunda7.18流程引擎启动出现Table ‘camunda_platform_docker.ACT_GE_PROPERTY‘的解决方案 红队打靶:DR4G0N B4LL打靶思路详解(vulnhub) SQL Server添加用户登录 pytest如何在类的方法之间共享变量? 配置前端项目到 github-pages VSCode使用教程 vscode——本地配置(C和C++环境配置)(2) 【从零开始学习重要知识点 | 第一篇】快速了解什么是幂等性以及常见解决方案