「优选算法刷题」:寻找旋转排序数组中的最小值
一、题目
已知一个长度为 n 的数组,预先按照升序排列,经由 1 到 n 次 旋转 后,得到输入数组。例如,原数组 nums = [0,1,2,4,5,6,7] 在变化后可能得到:
- 若旋转
4次,则可以得到[4,5,6,7,0,1,2] - 若旋转
7次,则可以得到[0,1,2,4,5,6,7]
注意,数组 [a[0], a[1], a[2], ..., a[n-1]] 旋转一次 的结果为数组 [a[n-1], a[0], a[1], a[2], ..., a[n-2]] 。
给你一个元素值 互不相同 的数组 nums ,它原来是一个升序排列的数组,并按上述情形进行了多次旋转。请你找出并返回数组中的 最小元素 。
你必须设计一个时间复杂度为 O(log n) 的算法解决此问题。
示例 1:
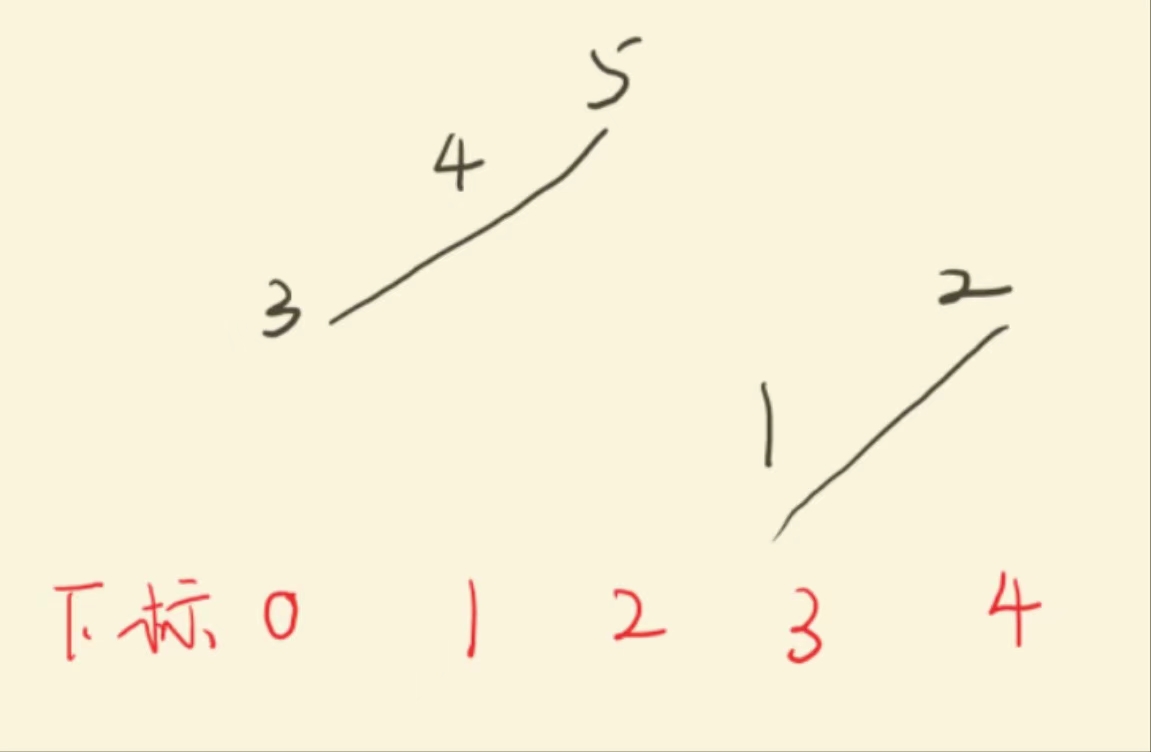
输入:nums = [3,4,5,1,2] 输出:1 解释:原数组为 [1,2,3,4,5] ,旋转 3 次得到输入数组。
示例 2:
输入:nums = [4,5,6,7,0,1,2] 输出:0 解释:原数组为 [0,1,2,4,5,6,7] ,旋转 3 次得到输入数组。
示例 3:
输入:nums = [11,13,15,17] 输出:11 解释:原数组为 [11,13,15,17] ,旋转 4 次得到输入数组。
二、思路解析
观察一下题目所给的数据,比如示例 1 ,我们可以发现下标为 3 的元素 1 跟其他元素有所不同:
而这就是一个二段性,使得查找区间能够⼀分为二,也是二分查找的本质。
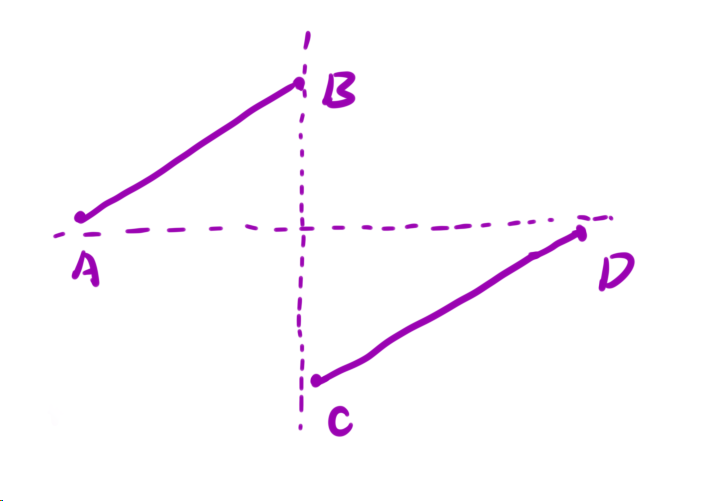
而这个二段性还可以继续抽象成上图,其中 C 点就是我们要求的点。
因此,初始化左右两个指针 left , right :
然后根据 mid 的落点,我们可以这样划分下⼀次查询的区间:
▪ 当 mid 在 [A,B] 区间的时候,也就是 mid 位置的值严格大于 D 点的值,下⼀次查询区间在 [mid + 1,right] 上;
▪ 当 mid 在 [C,D] 区间的时候,也就是 mid 位置的值严格小于等于 D 点的值,下次查询区间在[left,mid] 上。
当区间长度变成 1 的时候,就是我们要找的结果。
具体实现请看下面代码👇
三、完整代码
class Solution {public int findMin(int[] nums) {int left = 0;int right = nums.length - 1;int x = nums[right];while(left < right){int mid = left + (right - left - 1) / 2;if(x < nums[mid]){left = mid + 1;}else{right = mid;}}return nums[left];}
}以上就是本篇博客的全部内容啦,如有不足之处,还请各位指出,期待能和各位一起进步!