当前位置: 首页 > news >正文 基于卡尔曼滤波的平面轨迹优化 news 2025/9/13 0:19:21 文章目录 概要卡尔曼滤波代码主函数代码CMakeLists.txt 概要 在进行目标跟踪时,算法实时测量得到的目标平面位置,是具有误差的,连续观测,所形成的轨迹如下图所示,需要对其进行噪声滤除。这篇博客将使用卡尔曼滤波,对轨迹进行优化。 优化的结果为黄色线。 卡尔曼滤波代码 #include <iostream> 查看全文 http://www.lryc.cn/news/287770.html 相关文章: GBASE南大通用分享如何更新嵌套的集合 Maya------插入循环边 Nginx_入门 坚持刷题 | 平衡二叉树 江大白 | 万字长文图解Numpy教程,看这一篇就够了! 数据结构——静态链表 C++ 知识列表【图】 系统登录的时候的密码如何做到以加密的形式进行登录【java.security包下的api】工具类。 java基础学习: 什么是泛型的类型擦除 Vue+OpenLayers7入门到实战:在地图上添加缩放控件、比例尺控件和鼠标经纬度位置显示控件 极简生活|可以慢慢变富的8个习惯 MySQL基础(一) 【Linux编译器-gcc/g++使用】 SQL提示与索引终章 基于OpenSSL的SSL/TLS加密套件全解析 01-echarts如何绘制三维折线图 Linux-共享内存 深入分析 Linux 网络丢包问题 web安全学习笔记【08】——算法1 2024最新版Python 3.12.1安装使用指南 Oracle 经典练习题 50 题 PyTorch的衍生资源 开源项目Git Commit规范与ChangeLog 【原理图PCB专题】OrCAD Capture CIS关闭开始界面 【Linux】Ubuntu的gnome切换KDE Plasma Docker(九)Docker Buildx Flink问题解决及性能调优-【Flink不同并行度引起sink2es报错问题】 瑞_数据结构与算法_二叉搜索树 Linux 命令行访问名字中包含空格的文件或文件夹 Dart/Flutter工具模块:the_utils
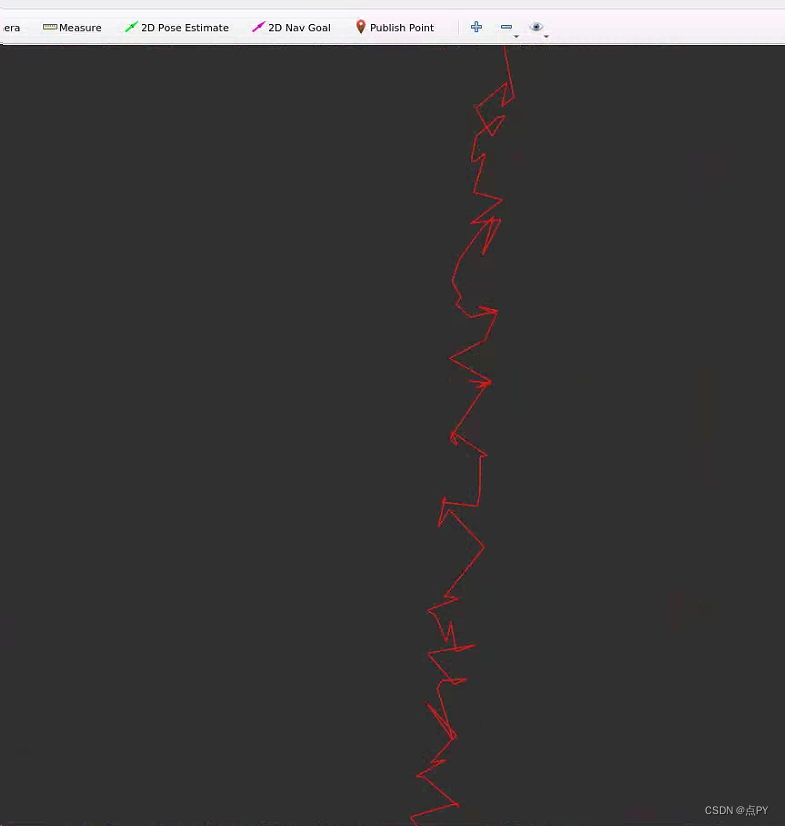
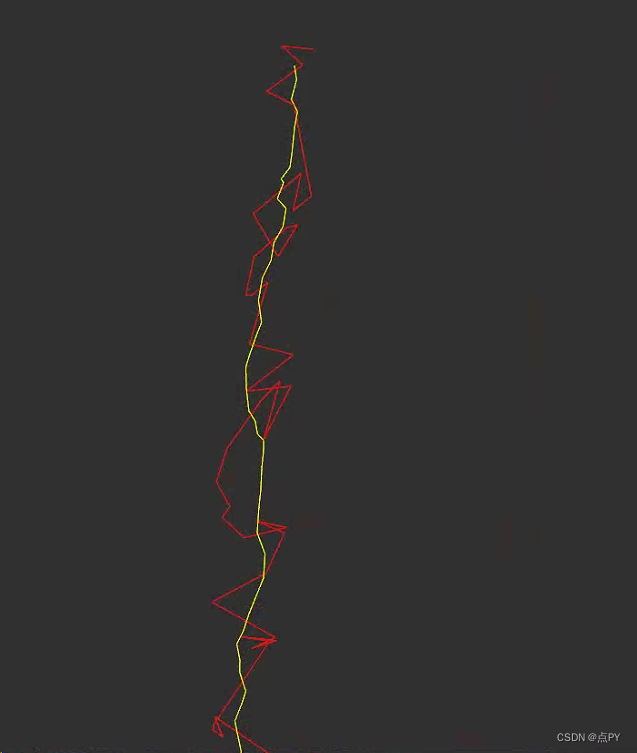
文章目录 概要卡尔曼滤波代码主函数代码CMakeLists.txt 概要 在进行目标跟踪时,算法实时测量得到的目标平面位置,是具有误差的,连续观测,所形成的轨迹如下图所示,需要对其进行噪声滤除。这篇博客将使用卡尔曼滤波,对轨迹进行优化。 优化的结果为黄色线。 卡尔曼滤波代码 #include <iostream> 查看全文 http://www.lryc.cn/news/287770.html 相关文章: GBASE南大通用分享如何更新嵌套的集合 Maya------插入循环边 Nginx_入门 坚持刷题 | 平衡二叉树 江大白 | 万字长文图解Numpy教程,看这一篇就够了! 数据结构——静态链表 C++ 知识列表【图】 系统登录的时候的密码如何做到以加密的形式进行登录【java.security包下的api】工具类。 java基础学习: 什么是泛型的类型擦除 Vue+OpenLayers7入门到实战:在地图上添加缩放控件、比例尺控件和鼠标经纬度位置显示控件 极简生活|可以慢慢变富的8个习惯 MySQL基础(一) 【Linux编译器-gcc/g++使用】 SQL提示与索引终章 基于OpenSSL的SSL/TLS加密套件全解析 01-echarts如何绘制三维折线图 Linux-共享内存 深入分析 Linux 网络丢包问题 web安全学习笔记【08】——算法1 2024最新版Python 3.12.1安装使用指南 Oracle 经典练习题 50 题 PyTorch的衍生资源 开源项目Git Commit规范与ChangeLog 【原理图PCB专题】OrCAD Capture CIS关闭开始界面 【Linux】Ubuntu的gnome切换KDE Plasma Docker(九)Docker Buildx Flink问题解决及性能调优-【Flink不同并行度引起sink2es报错问题】 瑞_数据结构与算法_二叉搜索树 Linux 命令行访问名字中包含空格的文件或文件夹 Dart/Flutter工具模块:the_utils