本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-3+4
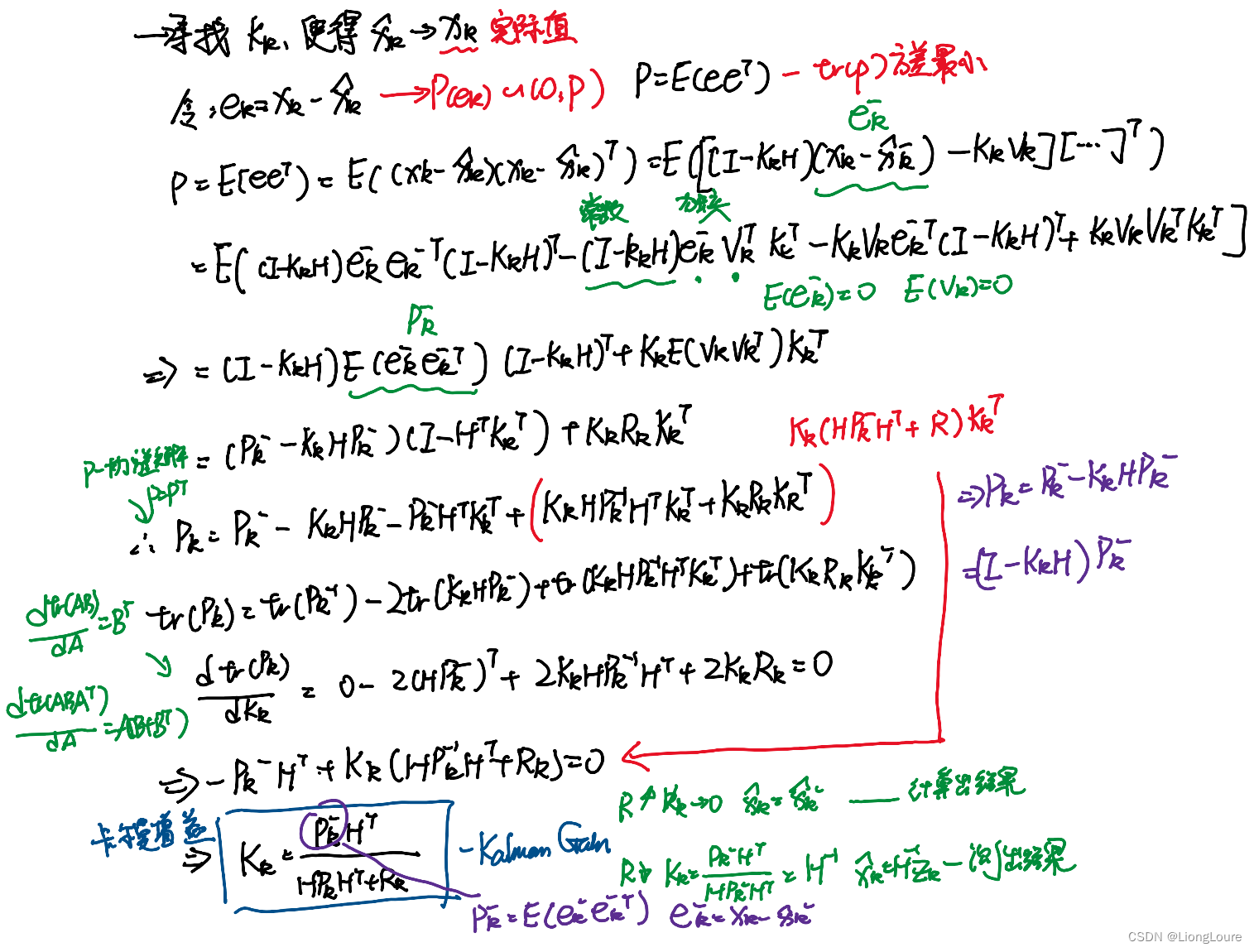
- 3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导
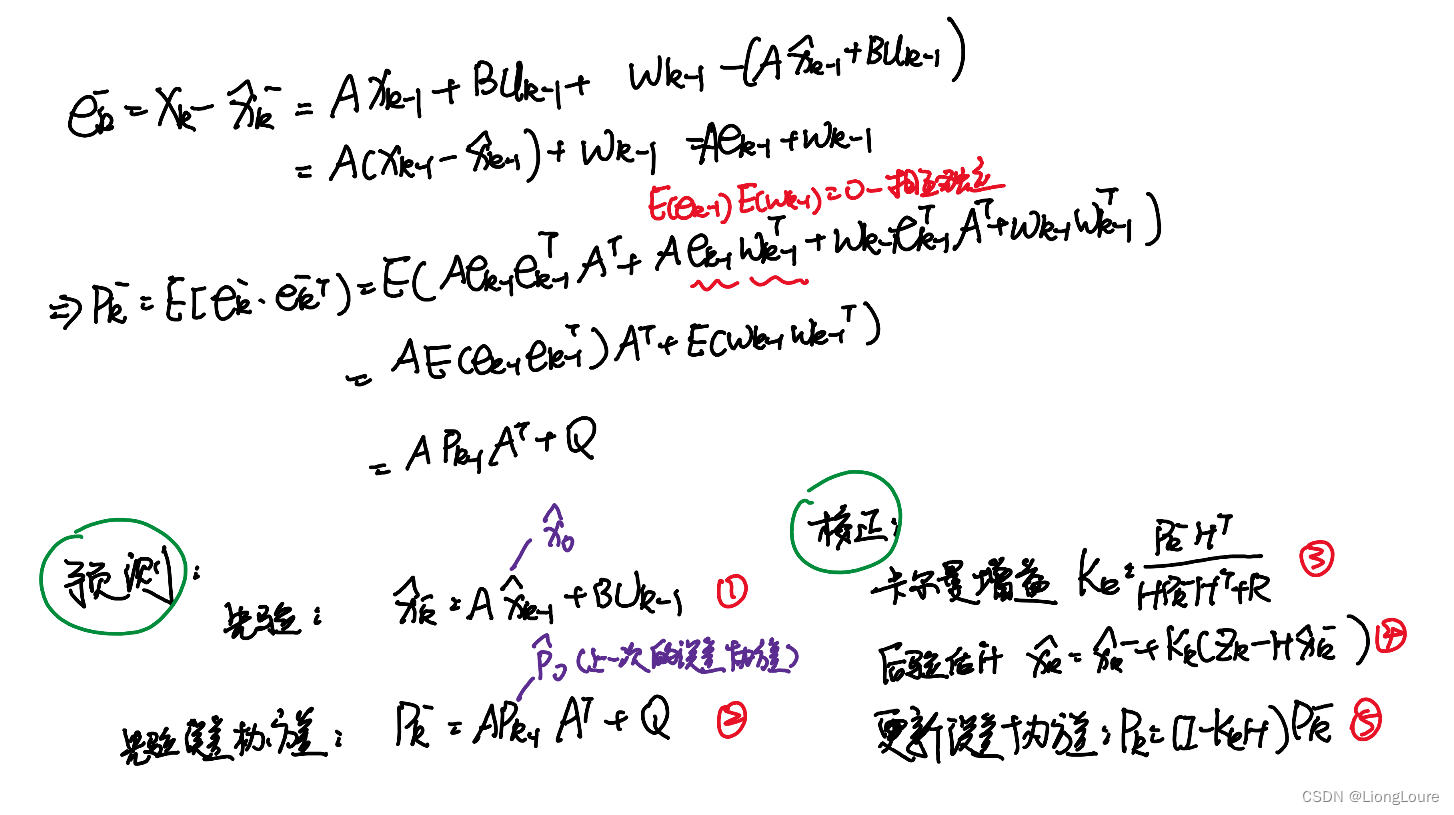
- 4. Priori/Posterrori error Covariance Martix 误差协方差矩阵
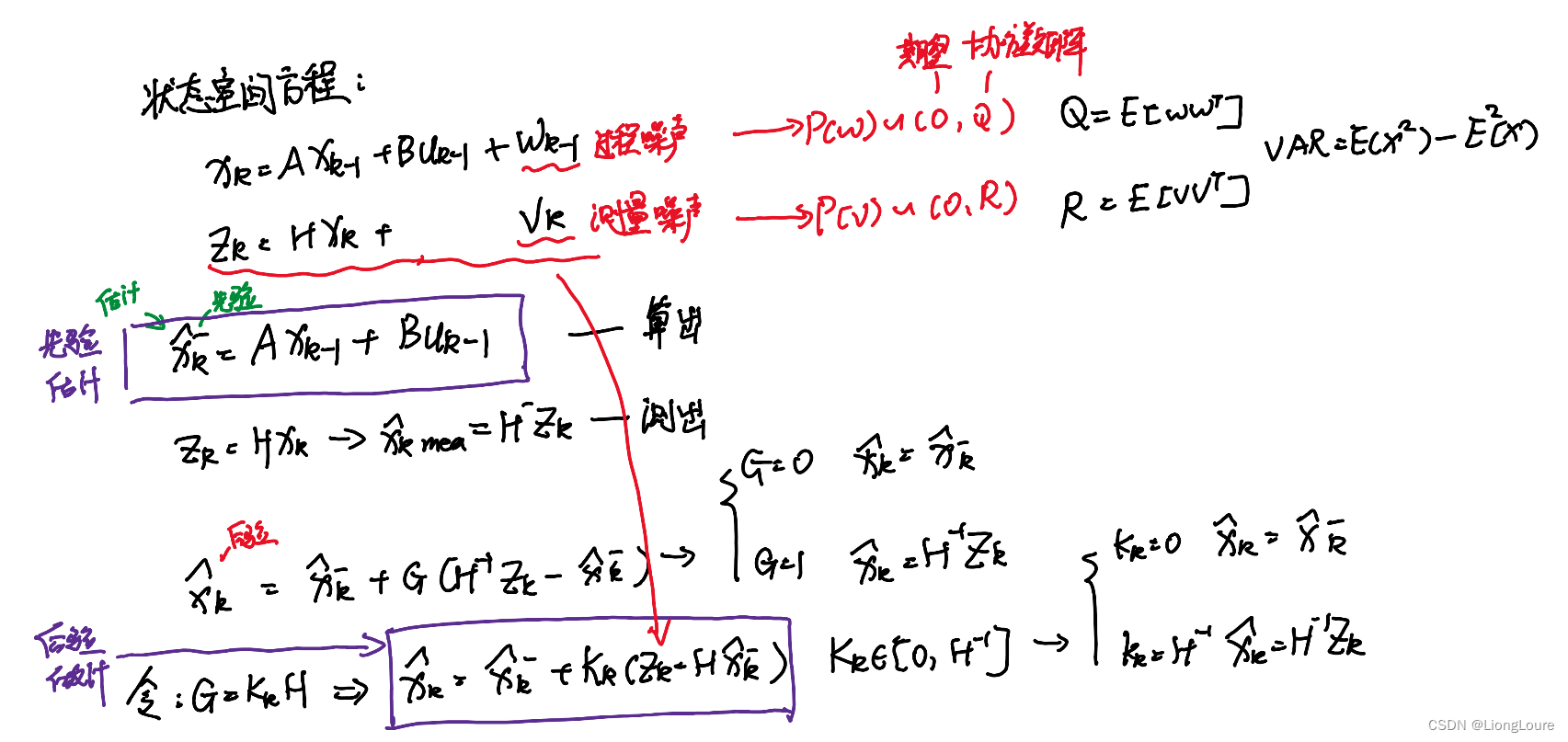
3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导
4. Priori/Posterrori error Covariance Martix 误差协方差矩阵