超维空间M1无人机使用说明书——53、ROS无人机二维码识别与降落——V2升级版本
引言:使用二维码引导无人机实现精准降落,首先需要实现对二维码的识别和定位,可以参考博客的二维码识别和定位内容。本小节主要是通过获取拿到的二维码位置,控制无人机全向的移动和降落,本小节再V1版本的基础上增加了动态调整,即无人机可以降落到动态移动的二维码标签上。基本原理就是无人机在降落的过程中,仍然不断地进行位置地调整,确保无人机能够实时地保持正对着静止或者移动的二维码。
源码链接
一、启动二维码识别与降落程序
roslaunch robot_bringup v2_ar_track_landing.launch
未出现红色报错,表明程序运行正常
launch文件详解
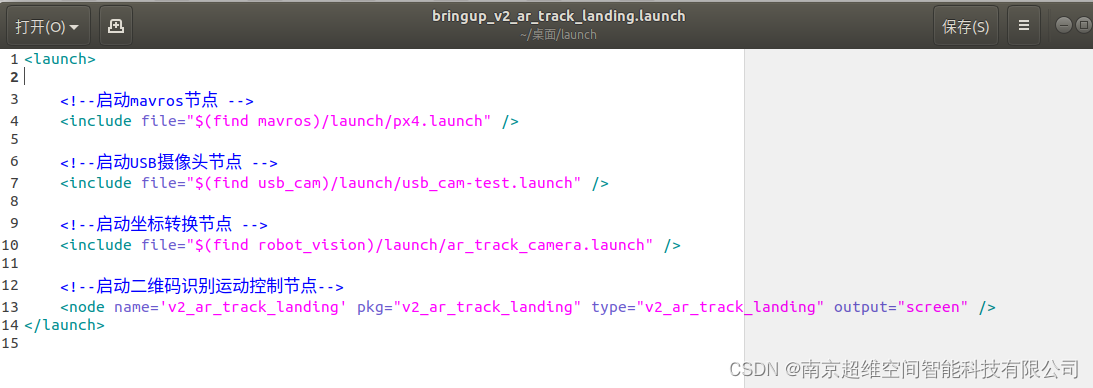
launch文件启动了四个节点,节点作用如下
1、mavros通信节点,实现底层PX4和ROS通信
2、启动USB摄像头节点,提供图像数据
3、启动二维码识别节点,以话题方式发布识别到的二维码位置信息
4、启动运动控制节点,该节点定位实时的二维码位置信息,进行运动控制