想了解步进伺服的朋友可以了解下这个方案
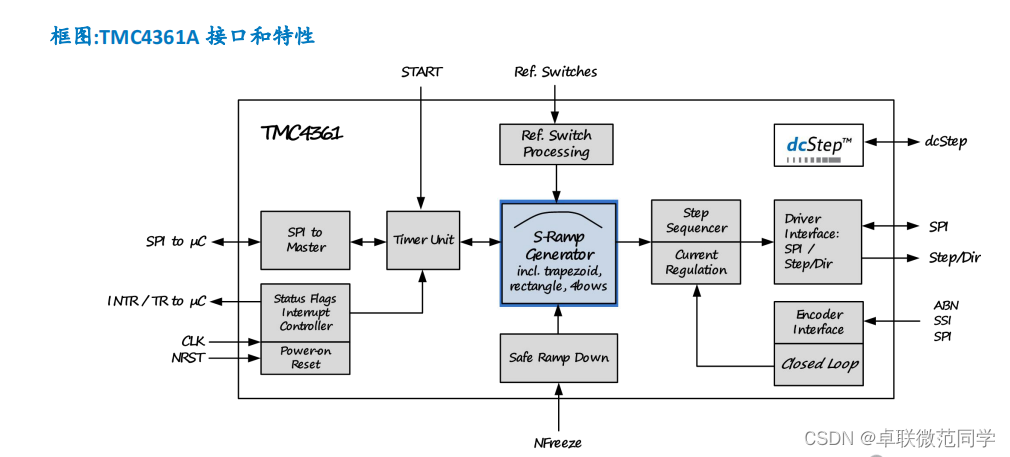
TMC4361A 是一款小型化、高性能的驱动步进电机的运动控制器。实用于很多的斜坡轮廓的应用,特别是速度快、限制过冲的运动场合。用户根据自己的要求实现 S 形或 sixPoint™六点式速度轮廓配置及闭环或开环的操作、动态修改运动参数。TMC4361A 包含 SPI接口、Step/Dir 接口及闭环所需的编码器接口。是步进伺服控制芯片首选,下面我们了解下TMC4361手册如下:

为实现某些应用,TMC4361A可与TMC5240A 或 TMC5160 结合使用。如果需要这些组合,TMC2240 或者 TMC2160 的所有信息和配置程序,同样适用于 TMC5240A 或 TMC5160,因为从 TMC4361A 的角度来看,这些芯片都是软件兼容的。
