camera曝光时间
曝光和传感器读数
相机上的图像采集过程由两个不同的部分组成。第一部分是曝光。曝光完成后,第二步就是从传感器的寄存器中读取数据并传输(readout)。
曝光:曝光是图像传感器进行感光的一个过程,相机曝光时间,也就是快门速度,曝光即曝光时间控制,控制感光元件上总的光通量。曝光越大,光通量越大。在数码相机中,可以采用电子快门,也可以采用传统的机械快门。快门速度和光圈大小是互补的。
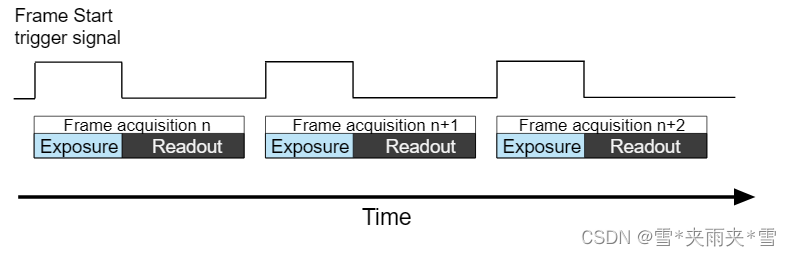
针对曝光和readout这两个步骤,相机操作有两种常见的方法:“non-overlapped”的曝光和“overlapped”的曝光。在非重叠(“non-overlapped”)模式中,每个图像采集的周期中,相机必须要完成曝光/readout整个过程才能进行下一轮图像采集开始前。
在global shutter相机上,非重叠图像采集如下所示:
在rolling shutter快门相机上,非重叠图像采集如下所示:
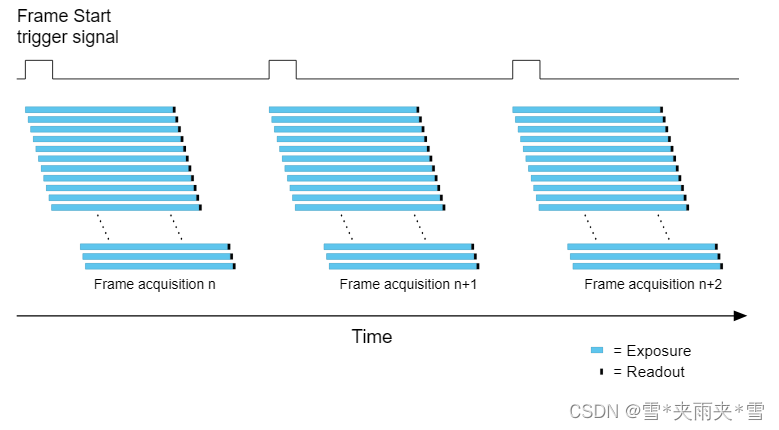
对于rolling shutter,非重叠图像采集non-overlapped就是在一行曝光完成后执行这一行数据的readout。图上可以看到,各行的曝光时间段是会有重叠的。
global shutter和rolling shutter的介绍见上一篇文章:camera卷帘快门(Rolling Shutter)与全局快门(Global Shutter)
Overlapping Image Acquisition
Overlapping Image Acquisition就是相机在曝光新图像的同时仍读取前一个图像的传感器数据。
如果您想提高相机的帧速率,这将非常有用。
在全局快门相机上,重叠图像采集如下所示:
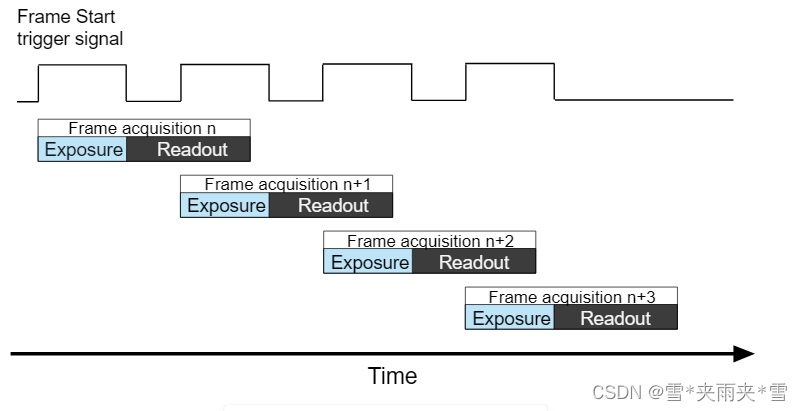
可以看到第一帧在进行readout的时候,第二帧已经开始曝光了,重叠指的就是曝光和readout重叠。
在卷帘快门相机上,重叠图像采集如下所示:
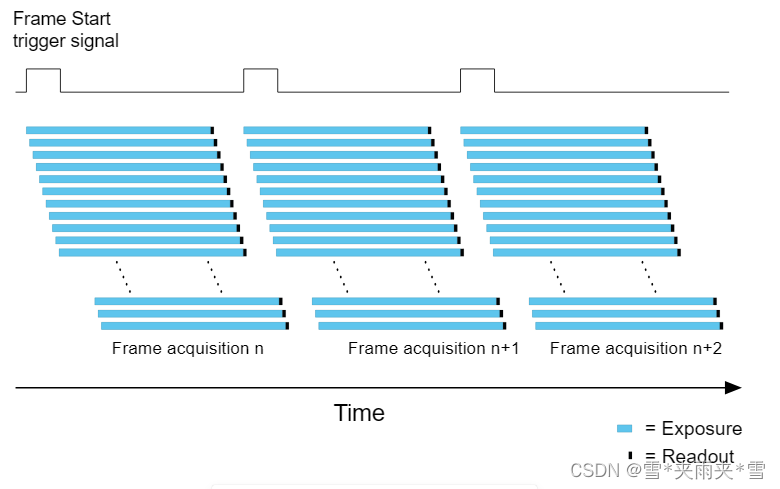
对于rolling shutter,重叠和非重叠采集是一样的。
帧率和曝光时间的关系
帧率(Frame rate)是用于测量显示帧数的度量。所谓测量单位就是每秒帧数(Frames per Second),简称FPS或“赫兹”(Hz)。
由于人眼特殊的生理结构,如果被观看的图像的帧率高于16fps,则认为是相干的。这种现象称为视觉持久性。这就是为什么电影胶片是一帧一帧地拍摄然后快速播放的原因。
由于人眼特殊的生理结构,如果被观看的图像的帧率高于16fps,则认为是连续的。这种现象称为视觉持久性。这就是为什么电影胶片是一帧一帧地拍摄然后播放看起来是连续的的原因。
每秒帧数 (fps) 或帧速率表示图形处理器在处理字段时每秒可以更新的次数。高帧率可以获得更流畅、更逼真的动画。一般30fps是可以接受的,但将性能提高到60fps可以显着提高交互感和真实感,但一般来说,当它超过75fps时,不容易注意到流畅度的显着提高。如果帧率超过屏幕刷新率,只会浪费图形处理能力,因为显示器无法以如此快的速度更新,因此超过刷新率的帧率就被浪费了。
最大帧速率(Frame Rate)/Line Rate:相机收集和传输图像的速率。对于面阵相机,它通常是每秒收集的帧数(帧/秒),而对于线阵相机,它是每秒收集的。行数 (Hz)。
有人问为什么我们在使用工业相机的时候,增加相机的曝光时间后,相机的帧率下降,而且下降得很严重。相机的帧率和曝光之间有什么关系?
如上面所述,相机获取一张图片包括曝光和readout读出数据两部分。
在“重叠”曝光模式下: FramePeriod≤曝光时间+读出时间
在“非重叠”曝光模式下:FramePeriod>曝光时间 + 读出时间
由此可知如果曝光周期设置过长的话帧率是会有所下降的。