OpenCV极坐标变换函数warpPolar的使用
学更好的别人,
做更好的自己。
——《微卡智享》

本文长度为1702字,预计阅读4分钟
前言
前阵子在做方案时,得了几张骨钉的图片,骨科耗材批号效期管理一直是比较麻烦的,贴RFID标签成本太高,所以一般考虑还是OCR的识别比较好,因为本身骨钉的字符是按圆印上去的,直接截取图片进行OCR没法识别,需要经过图像处理后再识别,所以这篇就是学习一下OpenCV的极坐标变换函数。

实现效果

源图像
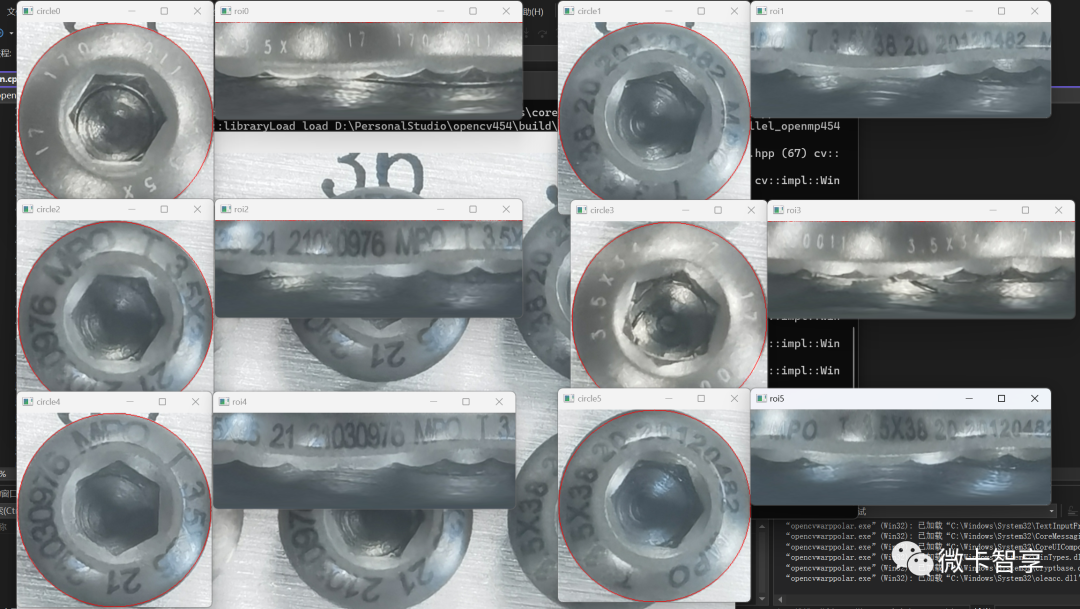 查找出骨钉后用极坐标变换生成的图像
查找出骨钉后用极坐标变换生成的图像
图像本来就是手机拍的,反光也比较厉害,所以本篇主要就是介绍极坐标变换,最后的OCR识别就不在这个范围内了。
极坐标变换函数
void cv::warpPolar(InputArray src, —原图像,单通道灰度图和三通道彩色图都可OutputArray dst, —输出图像,与原图像具有相同的数据类型和通道数Size dsize, —目标图像大小,如图不填这个值或dsize两个值中的某个值Point2f center, —极坐标变换时原点坐标double maxRadius, —极坐标系的极半径最大值int flags ) —插值方法与极坐标映射方法标志。方法之间通过“+”或者“|”号进行连接重点说明:
dsize:目标图像大小,Size(0,0)主要就是填写里面的width和height
-
当width和height两个值均<=0(默认),则目标图像将具有(几乎)相同的源边界圆面积
-
当width>0并且height <= 0,目标图像区域将与边界圆区域按比例缩放
-
当width和height都 > 0, 目标图像将具有给定的大小,因此边界圆的面积将缩放为dsize
flags:插值方法与极坐标映射方法标志
插值方法:图像缩放之后,肯定像素要进行重新计算的,就靠这个参数来指定重新计算像素的方式,一般分为:
-
INTER_NEAREST - 最邻近插值
-
INTER_LINEAR - 双线性插值,如果最后一个参数你不指定,默认使用这种方法
-
INTER_AREA -区域插值
-
INTER_CUBIC - 4x4像素邻域内的双立方插值
-
INTER_LANCZOS4 - 8x8像素邻域内的Lanczos插值
这个我们一般都默认为INTER_LINEAR - 双线性插值即可。
极坐标映射方法里面就三个,主要是极坐标变换、半对数极坐标变换和逆变换。
-
WARP_POLAR_LINEAR - 极坐标变换
-
WARP_POLAR_LOG - 半对数极坐标变换
-
WARP_INVERSE_MAP - 逆变换
核心来说其实就是两个极坐标变换和半对数极坐标变换,它们两个都是由圆变换为矩形,而逆变换就是针对两种变换由矩形再转为圆。逆变换在原来的flags后面用“+”连接即可。
warpPolar的起始位置和图像旋转角度
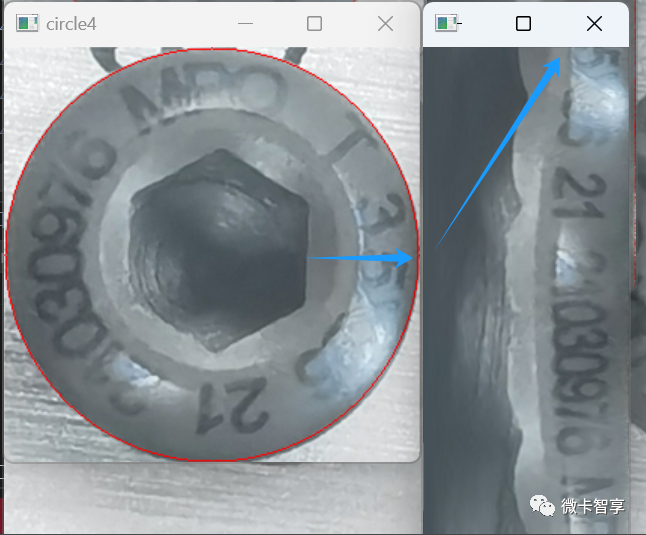
极坐标变换的起始位置默认就是3点钟的方向,上图中用蓝色箭头指的就是开始的位置,从3点钟方向顺时针来进行变换。
生成的矩形默认是向下垂直排列的,按我们自己的习惯肯定还需要将图像进行旋转,所以转换完后需要用rotate做一个图像的旋转。
代码如下:
//极坐标变换
//参数 flags=INTER_LINEAR 双线性插值
Mat warpPolarMat(Mat src, int flags = INTER_LINEAR + WARP_POLAR_LINEAR) {// 圆心坐标Point2f center = Point2f(src.cols / 2, src.rows / 2);// 圆的半径double maxRadius = min(center.y, center.x) - 1;// 圆的周长int circumference = maxRadius * 2 * 3.14;//输出图像Mat dst;// 极坐标变换, Size()表示OpenCV根据输入自行决定输出图像尺寸warpPolar(src, dst, Size(0, 0), center, maxRadius, flags);// 改变结果方向rotate(dst, dst, ROTATE_90_COUNTERCLOCKWISE);return dst;
}
实现思路及完整代码
| # | 实现步骤 |
|---|---|
| 1 | 图像简单处理(灰度图、中值滤波) |
| 2 | 霍夫圆检测获取到图像中的骨钉 |
| 3 | 将获取到的圆每个分别截取出来进行极坐标变换显示出来 |
完整代码
#include <iostream>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;//显示窗口设置
//参数 img 显示的图像源,
// winname 显示的窗口名称,
// pointx 显示的坐标x
// pointy 显示的坐标y
void setshowwindow(Mat img, string winname, int pointx, int pointy)
{//设置显示窗口namedWindow(winname, WindowFlags::WINDOW_NORMAL);//设置图像显示大小resizeWindow(winname, img.size());//设置图像显示位置moveWindow(winname, pointx, pointy);
}//极坐标变换
//参数 flags=INTER_LINEAR 双线性插值
Mat warpPolarMat(Mat src, int flags = INTER_LINEAR + WARP_POLAR_LINEAR) {// 圆心坐标Point2f center = Point2f(src.cols / 2, src.rows / 2);// 圆的半径double maxRadius = min(center.y, center.x) - 1;// 圆的周长int circumference = maxRadius * 2 * 3.14;//输出图像Mat dst;// 极坐标变换, Size()表示OpenCV根据输入自行决定输出图像尺寸warpPolar(src, dst, Size(0, 0), center, maxRadius, flags);// 改变结果方向rotate(dst, dst, ROTATE_90_COUNTERCLOCKWISE);return dst;
}int main(int argc, char** argv) {//测试图片文件 string testfile = "E:/DCIM/imagetest/06.png";//读取图片Mat src = imread(testfile);//修改图片大小setshowwindow(src, "src", 50, 200);imshow("src", src);//灰度图Mat gray;cvtColor(src, gray, COLOR_BGR2GRAY);//中值滤波medianBlur(gray, gray, 9);//霍夫圆检测vector<Vec3f> circles;HoughCircles(gray, circles, HOUGH_GRADIENT, 1, 50, 100, 100);//绘制检测到的圆型for (size_t i = 0; i < circles.size(); ++i) {Vec3f item = circles[i];//绘制检测到的圆circle(src, Point(item[0], item[1]), item[2], Scalar(0, 0, 255));//根据圆点和半径生成矩形Rect rect = Rect(Point(item[0] - item[2], item[1] - item[2]), Point(item[0] + item[2], item[1] + item[2]));//截图到当前圆的图像Mat rectsrc = src(rect);//极坐标变换Mat rectdst, showmat;rectdst = warpPolarMat(rectsrc);//设置当前圆显示位置String title = "circle" + to_string(i);String title2 = "roi" + to_string(i);if ((i % 2) == 0) {setshowwindow(rectsrc, title, 50, rectsrc.rows * (i / 2) + 2);setshowwindow(rectdst, title2, 50 + rectsrc.cols + 2, rectsrc.rows * (i / 2) + 2);}else {setshowwindow(rectsrc, title, (rectsrc.rows + rectdst.rows) * 2 , rectsrc.rows * (i / 2) + (i % 2) + 2);setshowwindow(rectdst, title2, (rectsrc.rows + rectdst.rows) *2 + rectsrc.rows , rectsrc.rows * (i / 2) + (i % 2) + 2);}imshow(title, rectsrc);imshow(title2, rectdst);}waitKey();return 0;
}完

往期精彩回顾
Android Aidl跨进程通讯(四)--接口回调,服务端向客户端发送数据
Android Aidl跨进程通讯(三)--进阶使用

Android Aidl跨进程通讯(二)--异常捕获处理