【VRTK】【VR开发】【Unity】13-攀爬
课程配套学习资源下载
https://download.csdn.net/download/weixin_41697242/88485426?spm=1001.2014.3001.5503
【概述】
VRTK提供两个预制件实现攀爬
- Climbing Controller,用于控制Player的物理义体
- Climbable Interactable,用于设置可攀爬对象
【设置Climbing Controller】
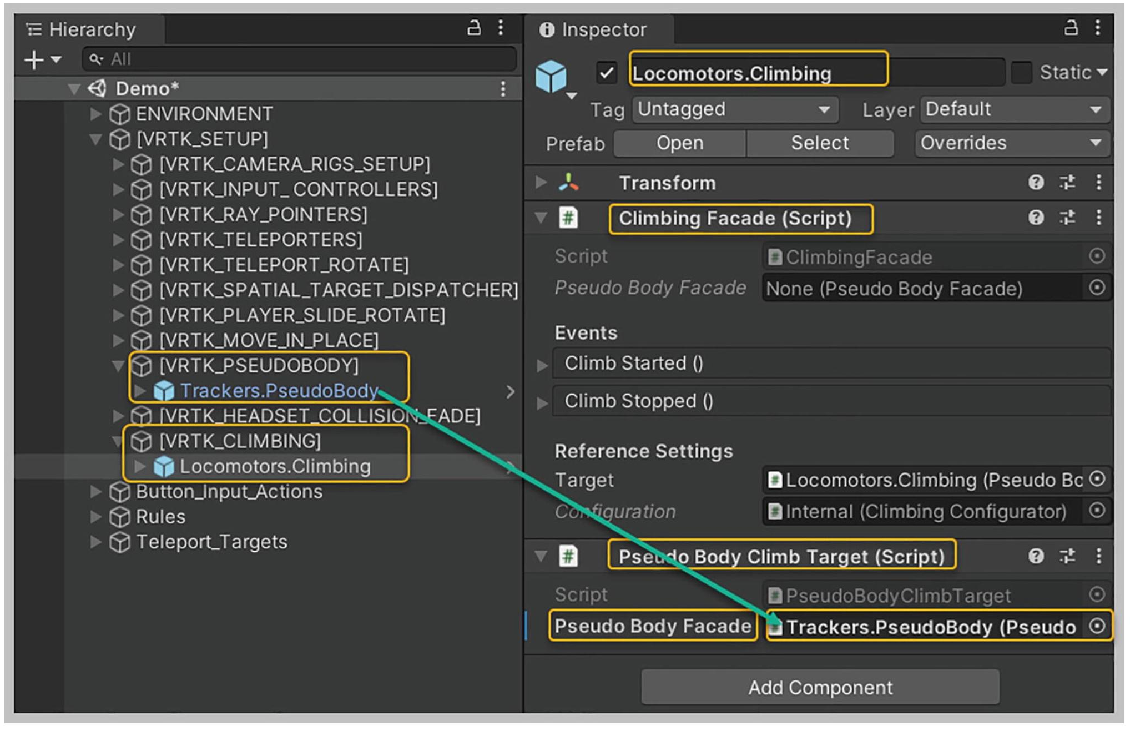
- 在Hierarchy选中VRTK SETUP,新建一个空对象命名为“VRTK CLIMBING”
- 打开Project面板,展开Packages-》Tilia Locomotors Climbing Unity-》。。。-》Prefabs,将Locomotors Climbing预制件拖放到Hierarchy的VRTK CLIMBING下。
- 接着指明提供物理作用的义体对象。在Hierarchy中选中Locomotors Climbing,属性面板中展开Climbing Facade-》Pseudo-Body Climb Target,从Hierarchy中将Pseudo-Body对象拖拽给Pseudo-Body Facade属性。
【设置集装箱为可攀爬】
-
从Projec