viple模拟器使用(五):Web 2D模拟器中实现两距离局部最优迷宫算法
关于两距离局部最优迷宫算法的原理本文不再赘述,详情请参考:viple模拟器使用(四),归纳总结为:
前方有路,则直行;
前方无路,则右转90度,标记右转完成;右转完成后进行测量,记录测量值为右侧距离。再左转180度进行测量,将测量值(实际上为左侧距离)与右侧距离进行比较,比较出哪边更宽敞就走那一边。
核心思想:只使用前方的距离传感器,前方有路则直行;前方无路,则探测右侧、左侧距离,往更安全的那一边行进。
Web 2D中可以使用机器人驱动器俩控制两个电机,从而控制机器人前进、后退、左转、右转以及暂停。(下面案例展示,如何通过驱动器,使得机器人前进和左转,那么,后退和右转是一样的道理,就不再编写)
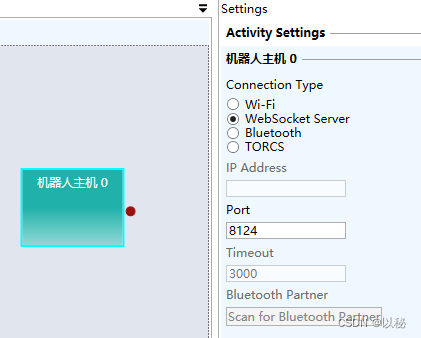
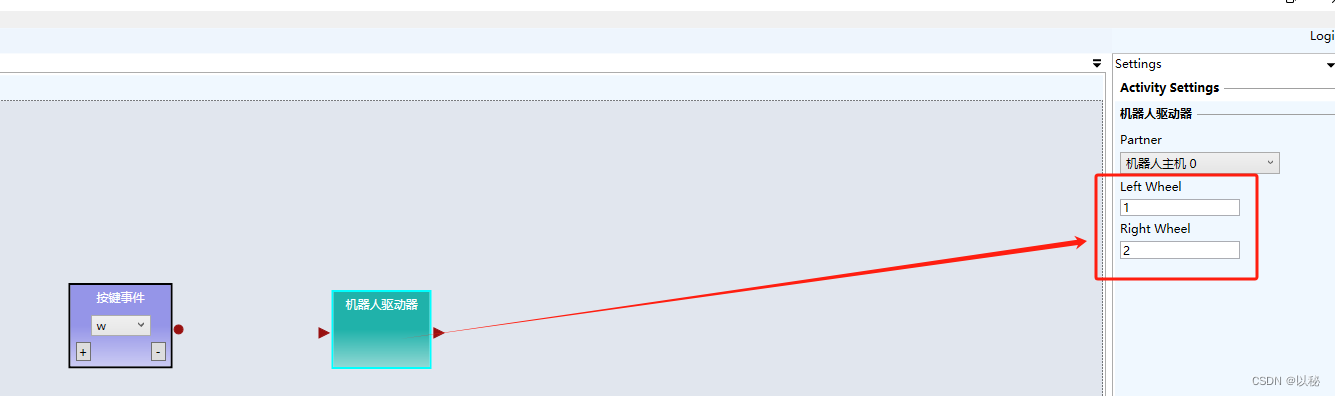
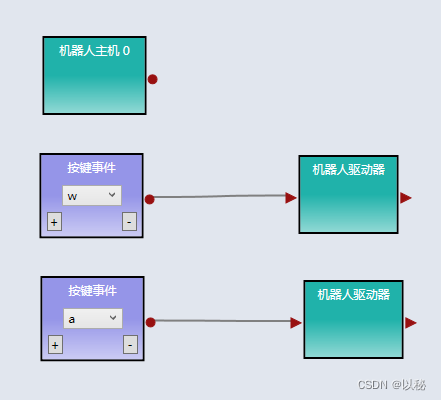
首先对主机进行配置,拖入2个机器人驱动器并进行配置
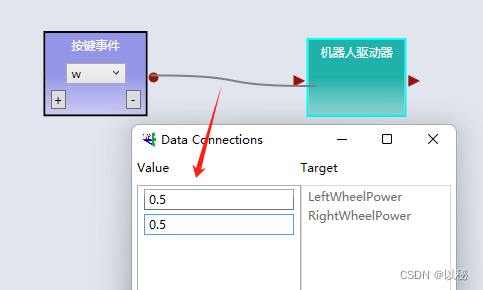
控制前进
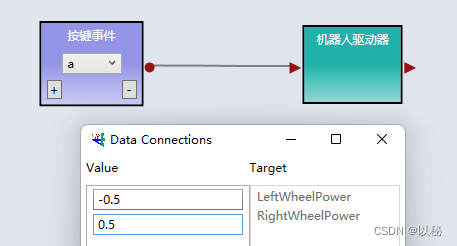
控制左转
整体程序如下:
运行:
启动viple
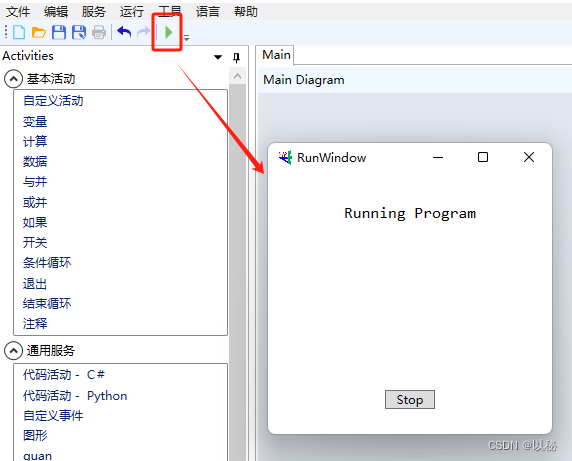
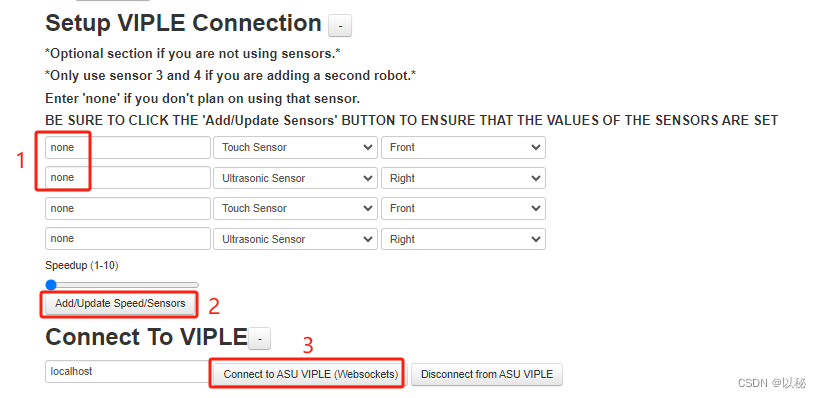
再点击运行,选择:启动Web 2D模拟器。并按照如下顺序进行如下配置
按下字母键w,观察到机器人前进,按下字母键a,观察到机器人左转,测试完毕。该步骤实现了简单的Web 2D模拟器的线控模拟,能连接上viple程序,能运行viple程序。
Web 2D模拟器中实现两距离局部最优迷宫算法,实现核心:根据原理,每完成一步,就进行测试。
第1步:配置主机,通过按键初始化机器人前进并记录状态。
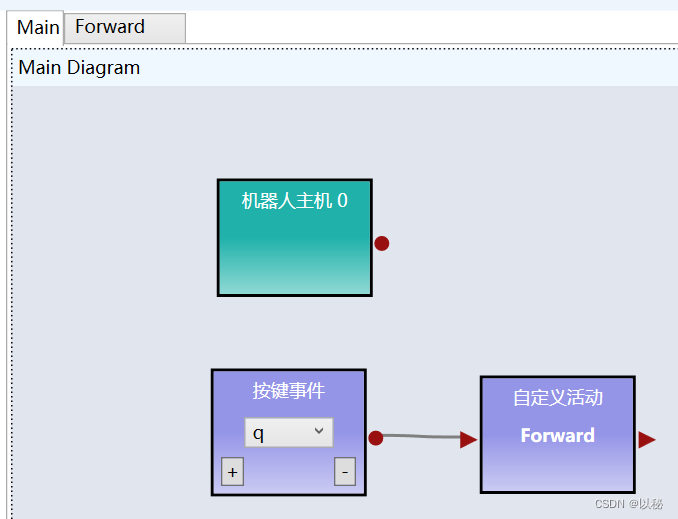
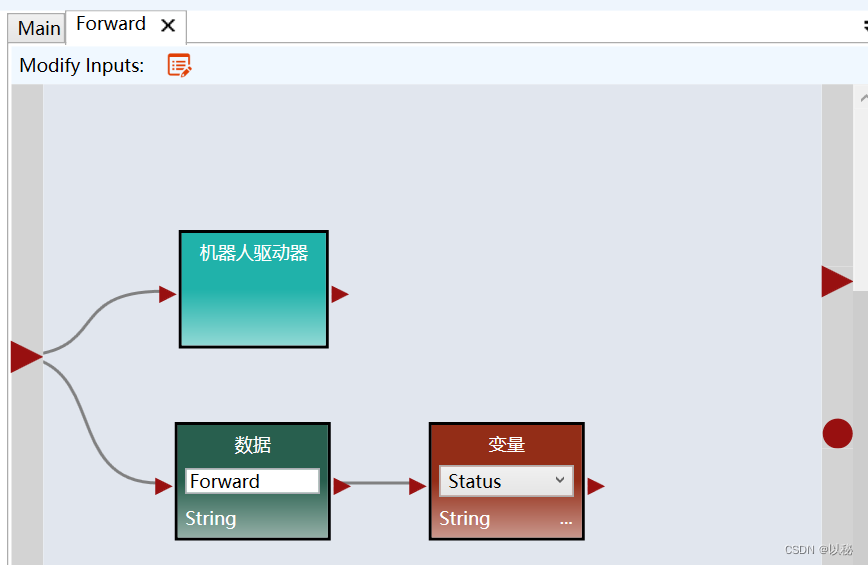
机器人驱动器,由于控制两个电机,所以,需要配置两个电机的端口号,假设左轮电机和右轮电机的端口号分别配置为5和8。由于Forward自定义活动是为了让机器人前进,所以,驱动器左右轮电机的驱动功率值设置为0~1之间的正数,且相等,才能实现机器人笔直前进,这里设置左右轮的驱动功率值均为为0.5
测试:运行后,按下字母q,机器人直行前进。

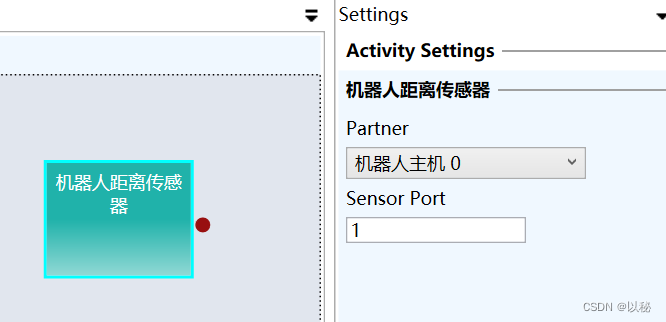
第2步:检测前方无路,进行右转90度。
使用前方的距离传感器进行测量,首先需要配置前方距离传感器的传感器端口号,端口号假设配置为1。

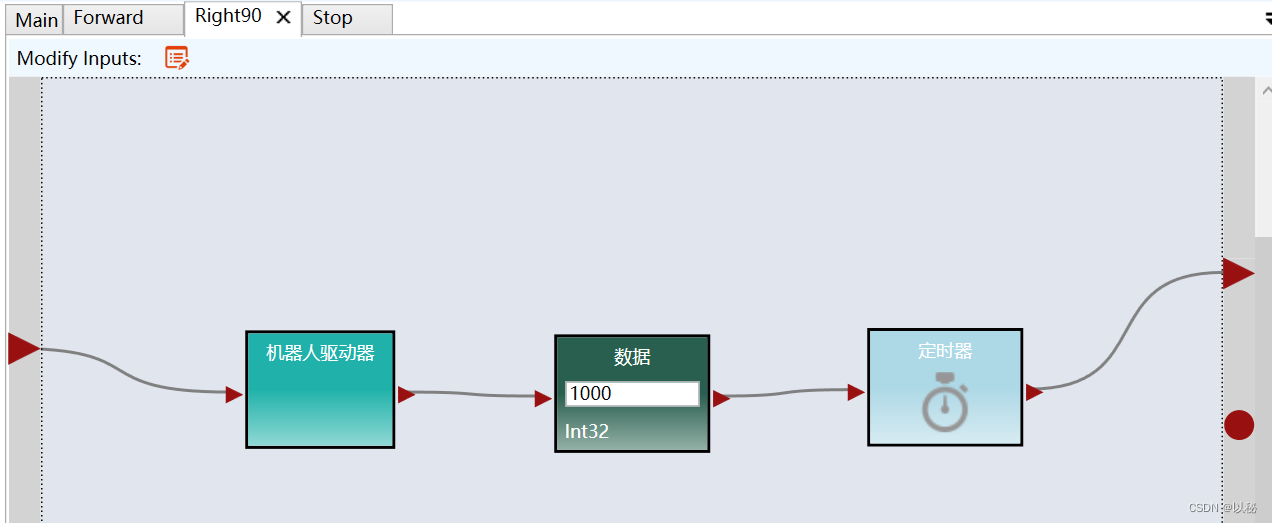
Right90
Stop
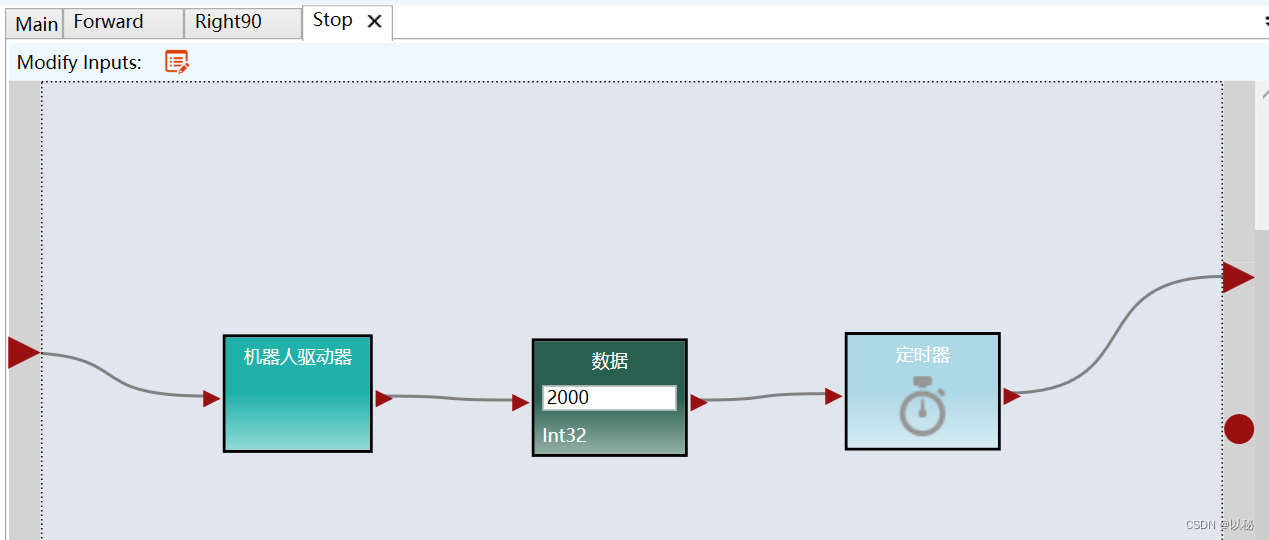
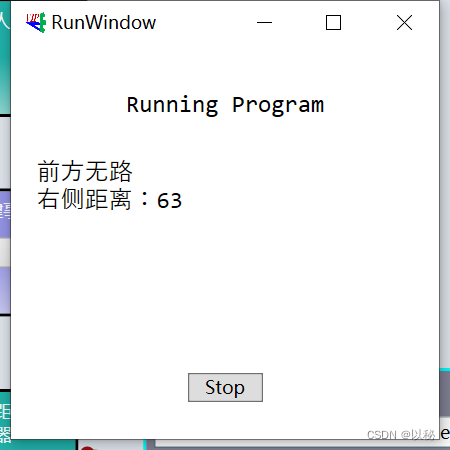
测试:运行后,机器人距离墙还有一定距离的时候,发现前方有障碍物,打印出数据,并暂停,再右转90度,再停下来。
第3步:检测右转90度完成后,测量距离,并将测量值存放到右侧变量中;再左转180度。
由于右转90度完成后,更新为新状态“右转90度完成了”,所以,可以在如果活动中直接进行判断。

测量出右侧距离后,存储了,并且还打印出来了,接下来做:再左转180度(可以参考右转90度的操作)

Left180:
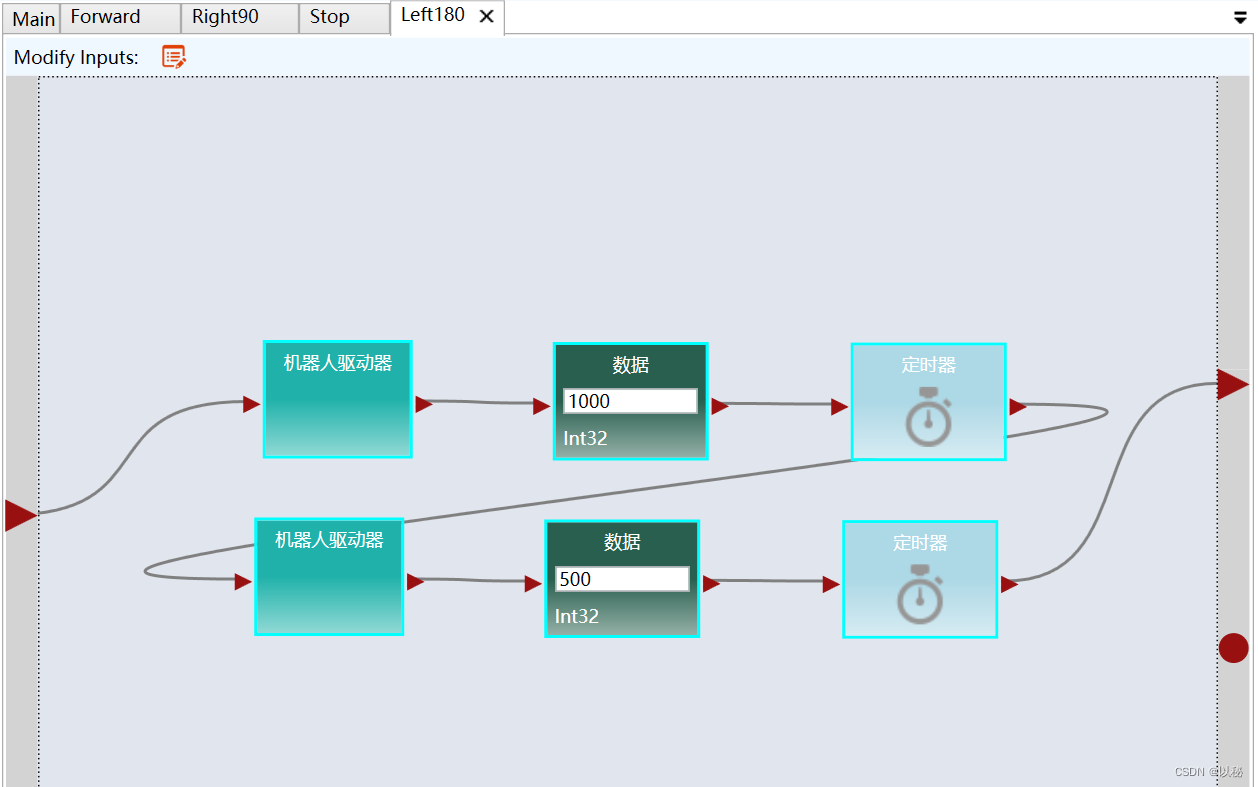
测试:运行后,机器人左转180度,做完动作后暂停下来,并且可以在viple运行界面看到测出来的右侧距离。
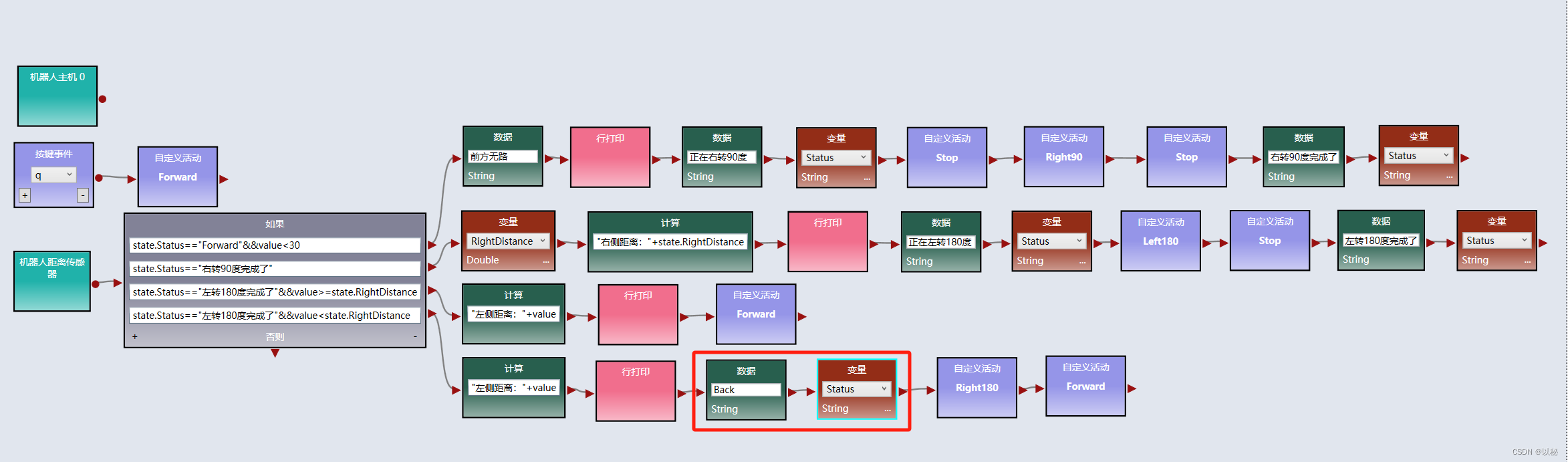
第4步:检测左转180度完成后,再一次测量距离,测量值与右侧变量进行比较,如果是大于等于关系,则说明应该左转,此时机器人面向左方,所以无需调整方向,直接直行即可。如果是小于关系,则说明应该右转,此时机器人面向左方,所以需要调整方向到右方(可通过右转180度完成),再直行。
左侧距离 ≥ 右侧距离
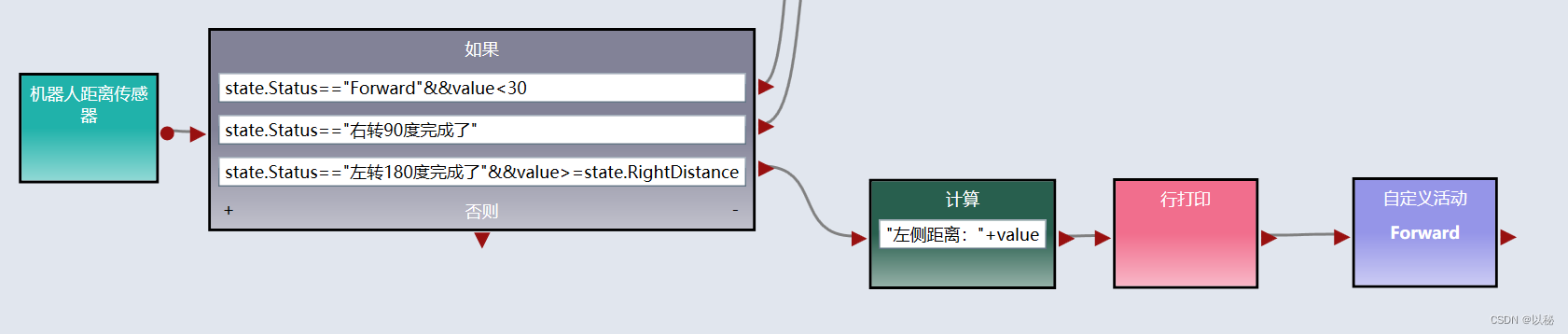
左侧距离 < 右侧距离

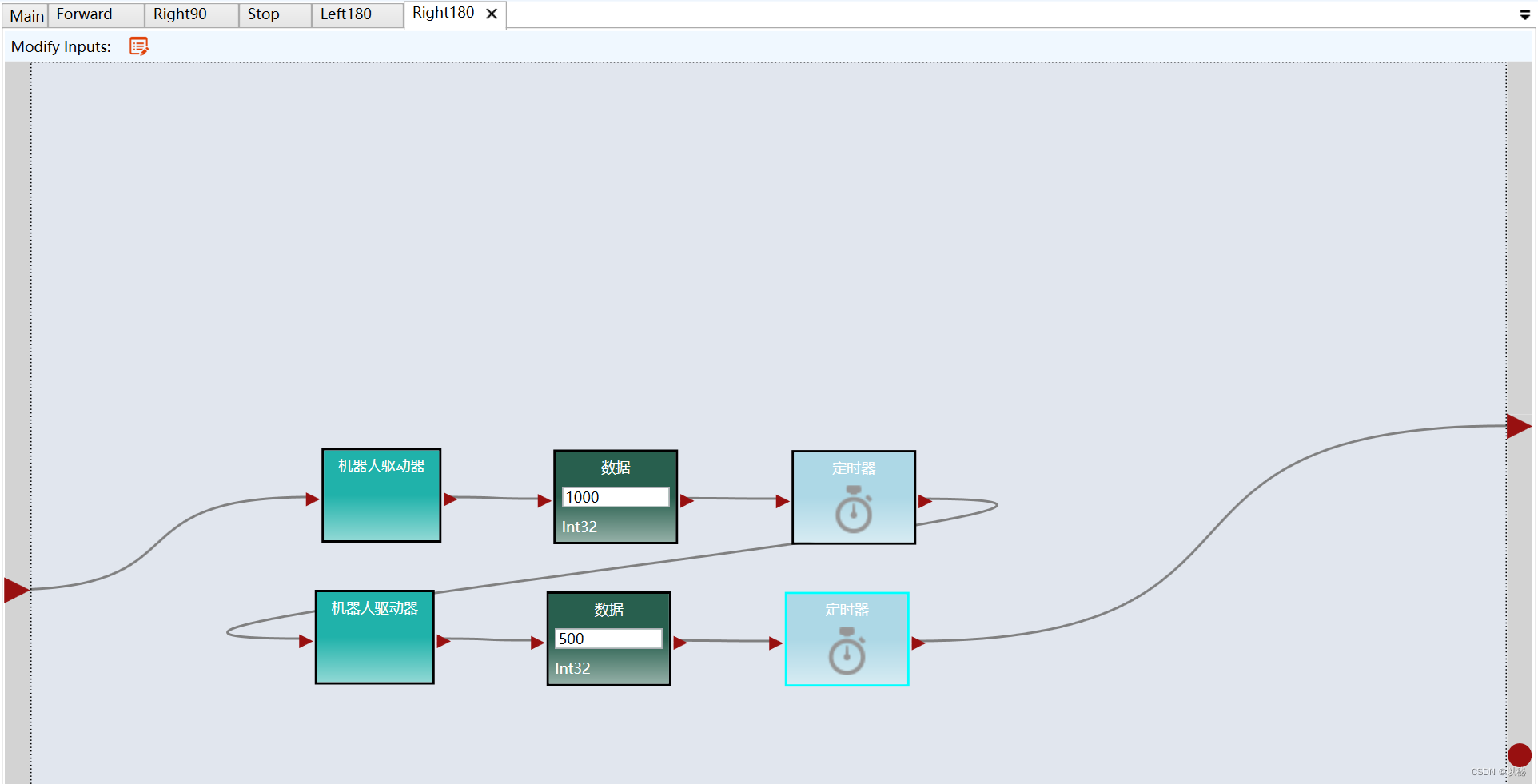
Right180
测试:运行后,前方无路,先打印右侧距离,再打印左侧距离,再选择往更宽敞的那一边前进。
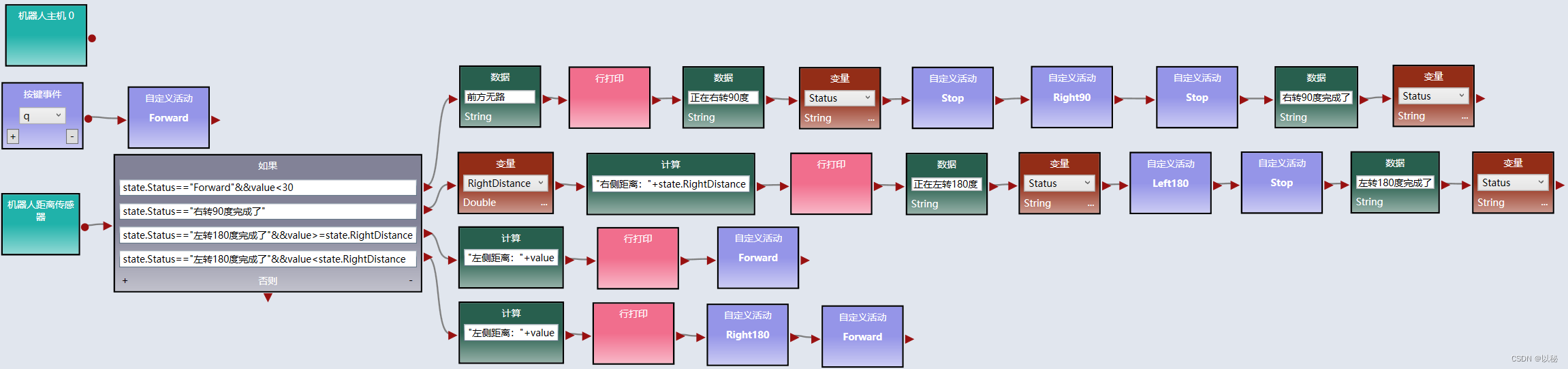
整体Main程序
第5步:观察运行现象,再进行适当调整参数,使得效果较佳即可。
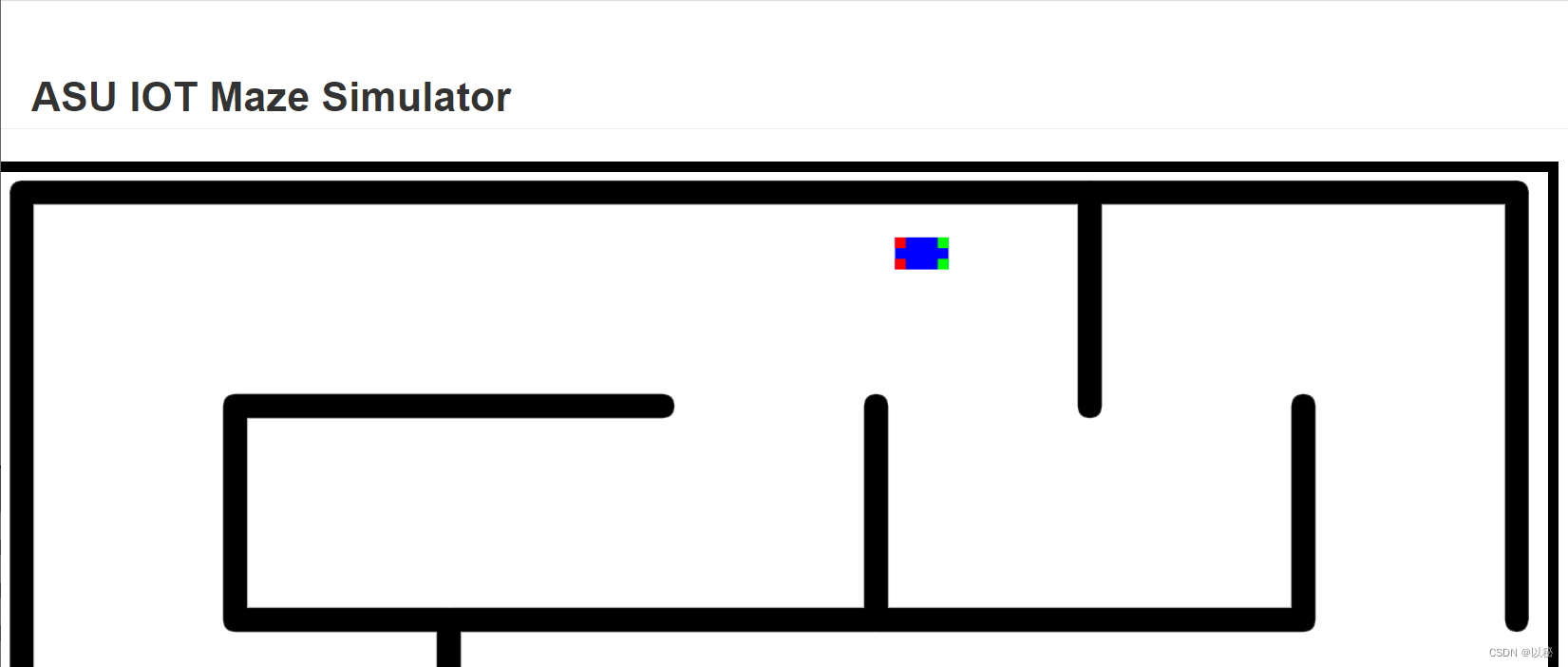
测试:查看运行结果,点击查看运行结果(哔哩哔哩视频的清晰度可以调整,效果更佳),再进行调参数
从运行结果发现,当右侧大于左侧时,右侧测距进行了多次打印,这是因为没有对状态进行锁定。
第6步:运行展示
最终测试,选择较好的结果作为整体运行结果