每日学术速递3.2
CV - 计算机视觉 | ML - 机器学习 | RL - 强化学习 | NLP 自然语言处理
Subjects: cs.CV
1.Interactive Segmentation as Gaussian Process Classification(CVPR 2023)

标题:作为高斯过程分类的交互式分割
作者:Minghao Zhou, Hong Wang, Qian Zhao, Yuexiang Li, Yawen Huang, Deyu Meng, Yefeng Zheng
文章链接:https://arxiv.org/abs/2302.14578v1
项目代码:https://github.com/zmhhmz/gpcis_cvpr2023

摘要:
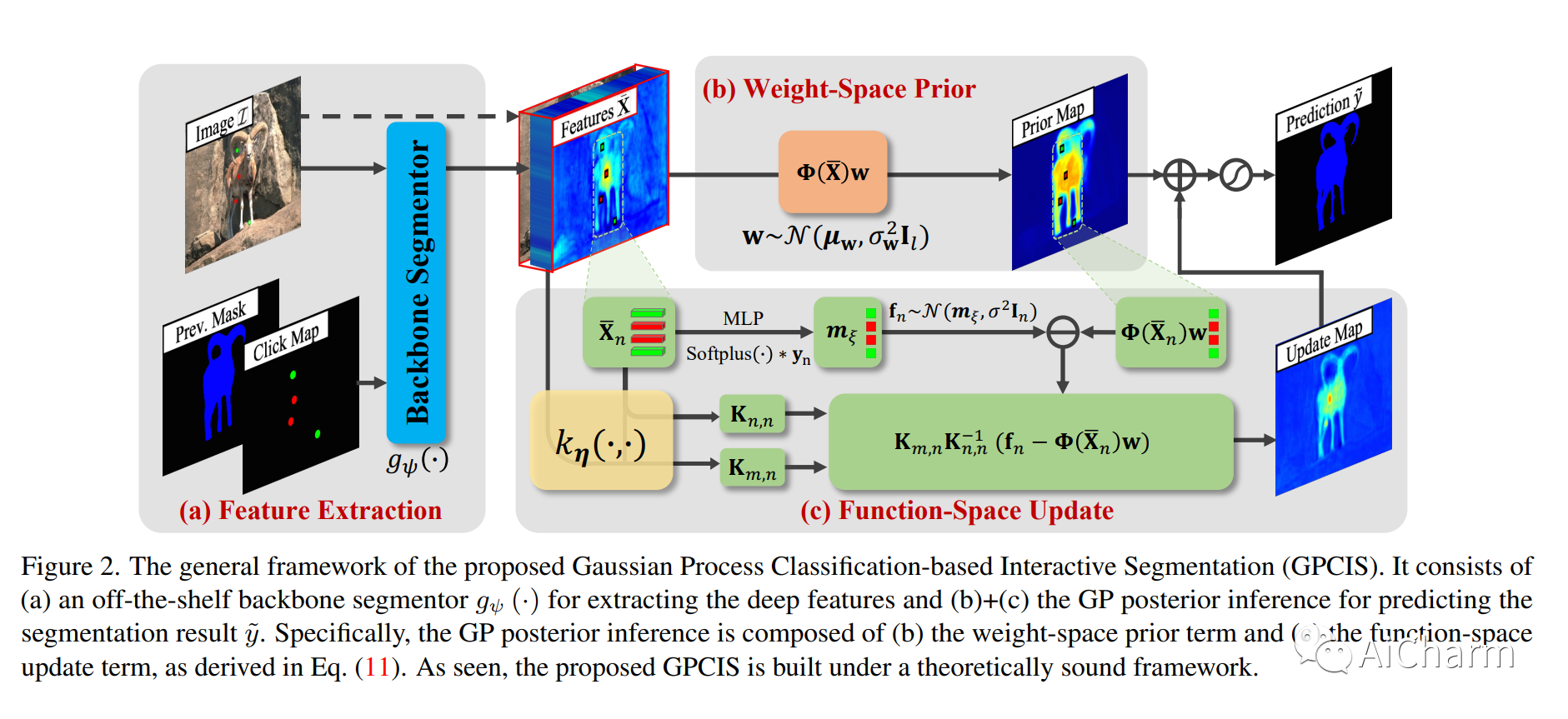
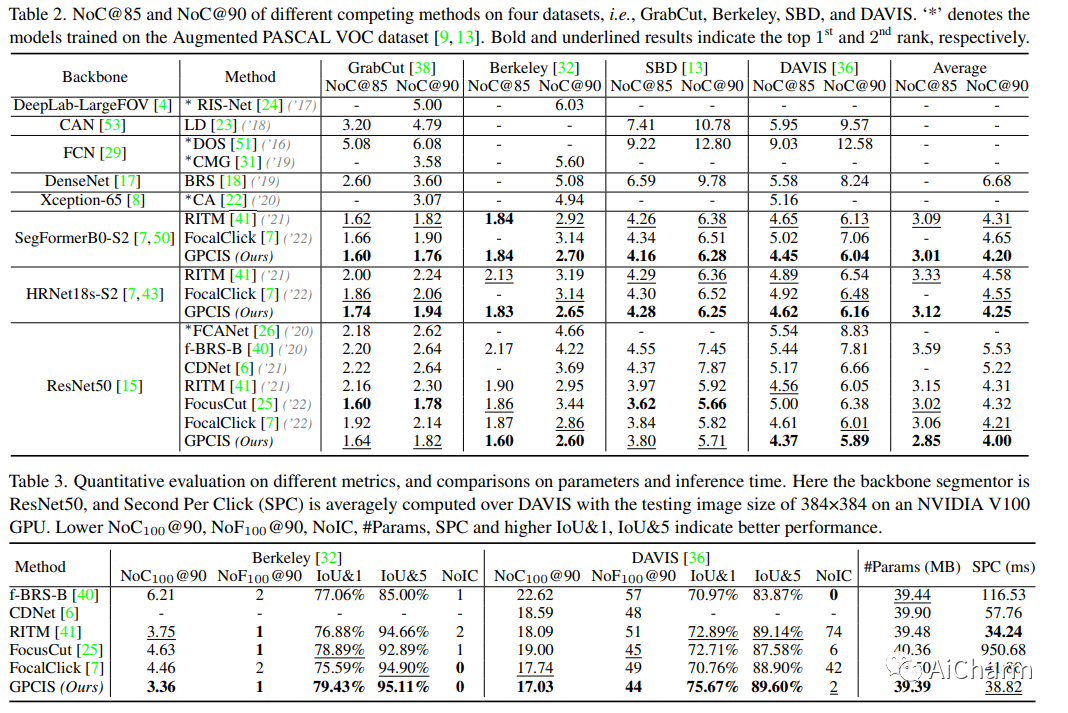
基于点击的交互式分割(IS)旨在提取用户交互下的目标对象。对于这项任务,当前大多数基于深度学习 (DL) 的方法主要遵循语义分割的一般流程。尽管取得了令人鼓舞的性能,但它们并没有完全明确地利用和传播点击信息,不可避免地导致不令人满意的分割结果,即使在点击点也是如此。针对这个问题,在本文中,我们建议将 IS 任务制定为每个图像上基于高斯过程 (GP) 的逐像素二进制分类模型。为了解决这个模型,我们利用分摊变分推理以数据驱动的方式逼近难处理的 GP 后验,然后将近似的 GP 后验解耦为双空间形式,以实现具有线性复杂度的高效采样。然后,我们相应地构建了一个 GP 分类框架,命名为 GPCIS,它与深度内核学习机制相结合,具有更大的灵活性。所提出的 GPCIS 的主要特点在于:1)在派生 GP 后验的明确指导下,点击中包含的信息可以很好地传播到整个图像,然后促进分割;2)点击预测的准确性有很好的理论支持。GPCIS 的这些优点及其良好的通用性和高效率已通过几个基准的综合实验得到证实,并与代表性方法进行了定量和定性比较。
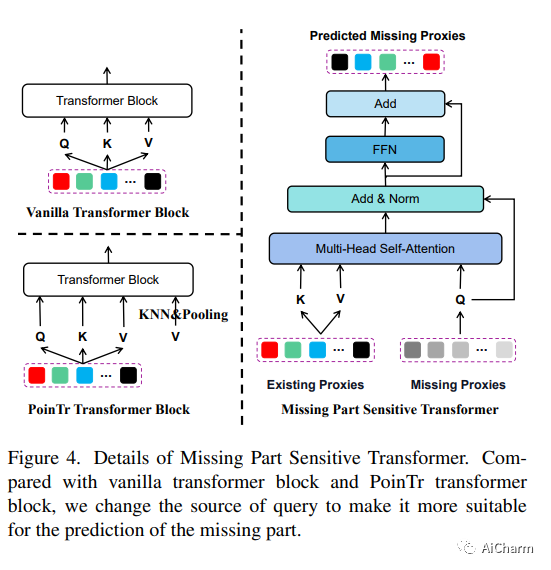
2.ProxyFormer: Proxy Alignment Assisted Point Cloud Completion with Missing Part Sensitive Transformer(CVPR 2023)
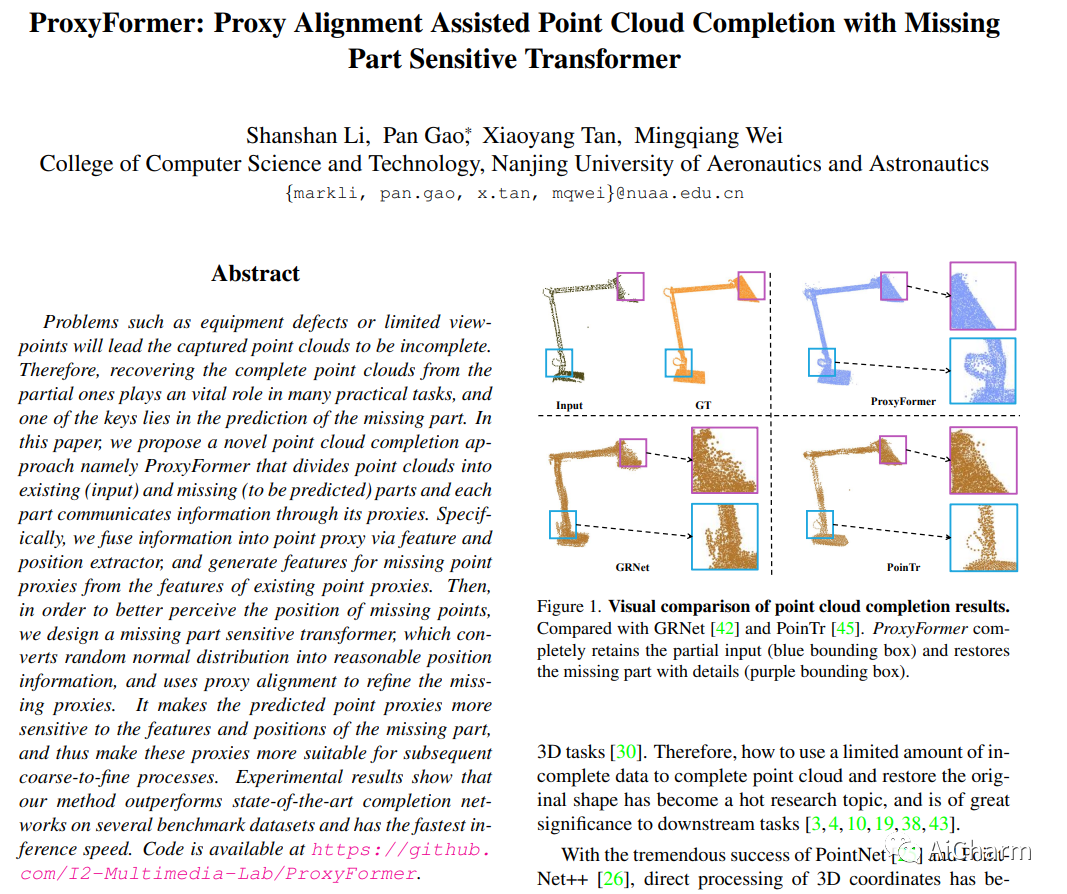
标题:ProxyFormer:代理对齐辅助点云完成与缺失部分敏感变压器
作者:Shanshan Li, Pan Gao, Xiaoyang Tan, Mingqiang Wei
文章链接:https://arxiv.org/abs/2302.14435v1
项目代码:https://github.com/i2-multimedia-lab/proxyformer

摘要:
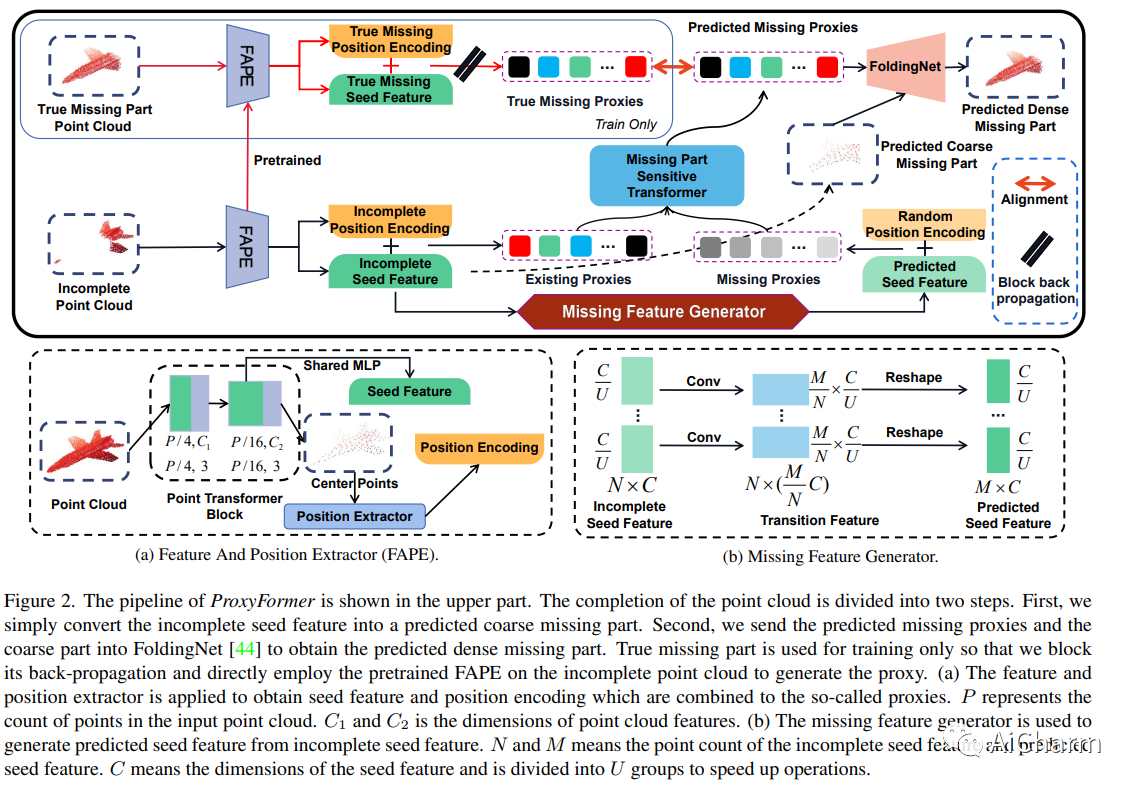
设备缺陷或视点受限等问题会导致捕获的点云不完整。因此,从部分点云中恢复完整点云在许多实际任务中起着至关重要的作用,而关键之一在于对缺失部分的预测。在本文中,我们提出了一种新颖的点云完成方法,即 ProxyFormer,它将点云分为现有(输入)和缺失(待预测)部分,每个部分通过其代理传递信息。具体来说,我们通过特征和位置提取器将信息融合到点代理中,并从现有点代理的特征中生成缺失点代理的特征。然后,为了更好地感知缺失点的位置,我们设计了一个缺失部分敏感转换器,将随机正态分布转换为合理的位置信息,并使用代理对齐来细化缺失代理。它使预测点代理对缺失部分的特征和位置更加敏感,从而使这些代理更适合后续的由粗到精的过程。实验结果表明,我们的方法在几个基准数据集上优于最先进的补全网络,并且具有最快的推理速度。代码可在 https://github.com/I2-Multimedia-Lab/ProxyFormer 获得。
Subjects: cs.LG
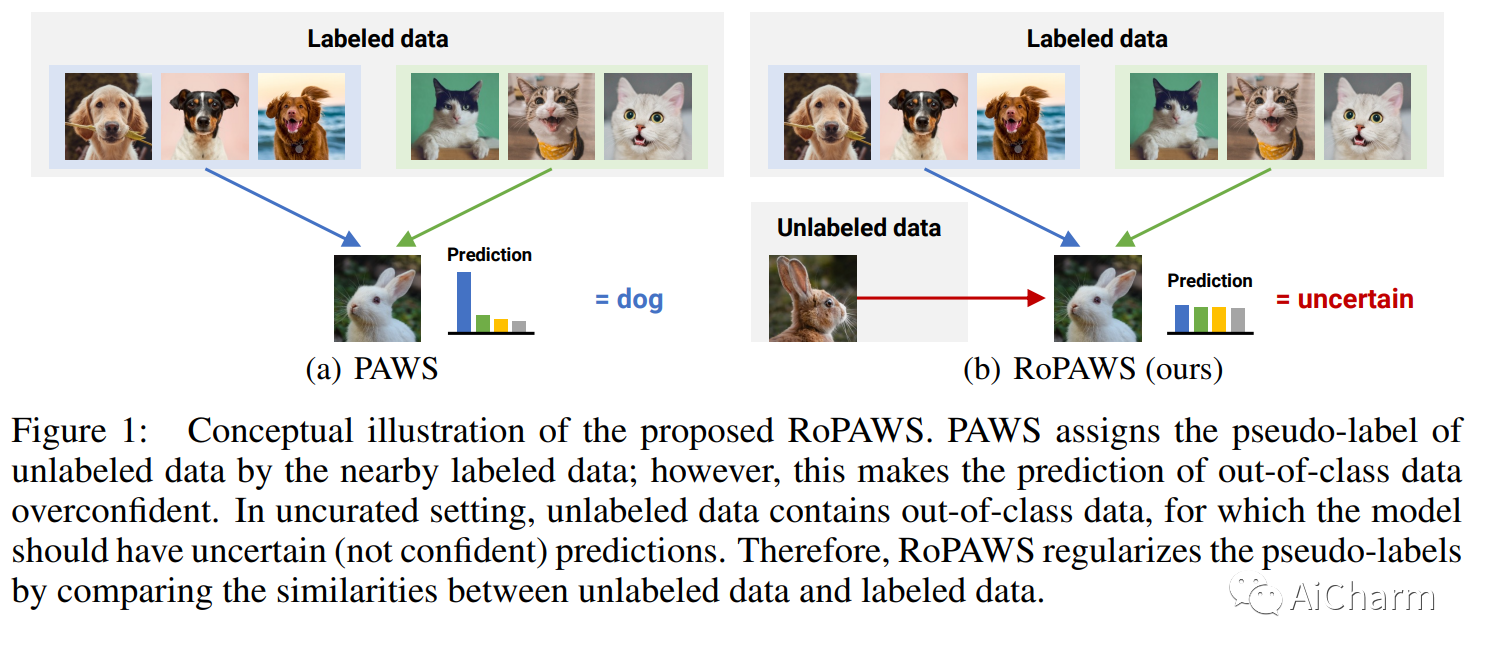
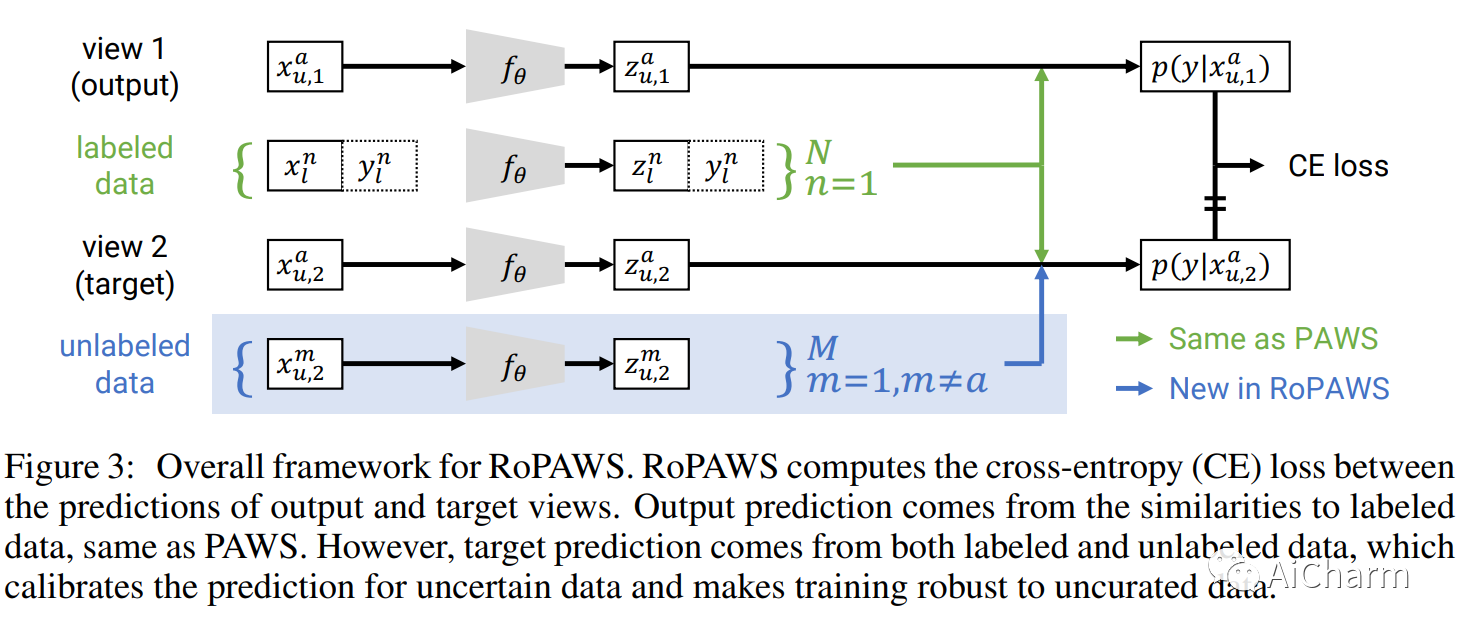
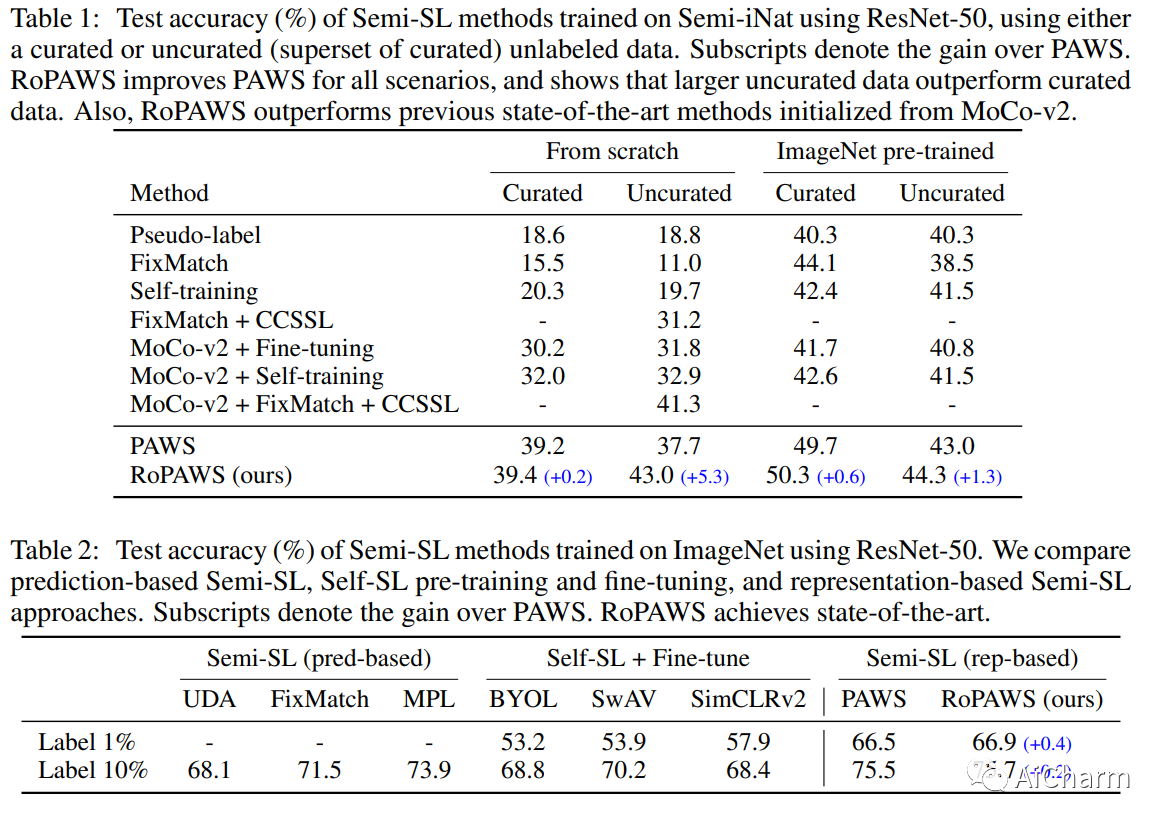
3.RoPAWS: Robust Semi-supervised Representation Learning from Uncurated Data(ICLR 2023)

标题:RoPAWS:从未经整理的数据中进行稳健的半监督表示学习
作者:Sangwoo Mo, Jong-Chyi Su, Chih-Yao Ma, Mido Assran, Ishan Misra, Licheng Yu, Sean Bell
文章链接:https://arxiv.org/abs/2302.14483v1
项目代码:https://github.com/facebookresearch/suncet
摘要:
半监督学习旨在使用有限的标签训练模型。用于图像分类的最先进的半监督方法(例如 PAWS)依赖于使用大规模未标记但经过整理的数据学习的自我监督表示。但是,当使用未经整理的真实世界未标记数据(例如,包含类外数据)时,PAWS 通常效率较低。我们提出了 RoPAWS,它是 PAWS 的强大扩展,可以处理真实世界的未标记数据。我们首先将 PAWS 重新解释为使用核密度估计对密度进行建模的生成分类器。从这个概率的角度来看,我们根据标记和未标记数据的密度校准其预测,从而根据贝叶斯规则得出一个简单的封闭形式的解决方案。我们证明,RoPAWS 显着提高了未策划的 Semi-iNat 的 PAWS + 5.3% 和策划的 ImageNet + 0.4%。
更多Ai资讯:公主号AiCharm