Linux系统认知——驱动认知
文章目录
- 一、驱动相关概念
- 1.什么是驱动
- 2.被驱动设备分类
- 3.设备文件的主设备号和次设备号
- 4.设备驱动整体调用过程
- 二、基于框架编写驱动代码
- 1.驱动代码框架
- 2.驱动代码的编译和测试
- 三、树莓派I/O口驱动的编写
- 1.微机的总线地址、物理地址、虚拟地址介绍
- 2.通过树莓派芯片手册确定需要配置的寄存器
- 3.根据驱动框架编写树莓派Pin4引脚的驱动
一、驱动相关概念
1.什么是驱动
Linux内核驱动:是指一段代码,这段代码可以驱动底层硬件,即驱动就是对底层硬件设备的操作进行封装,并向上层提供函数接口。
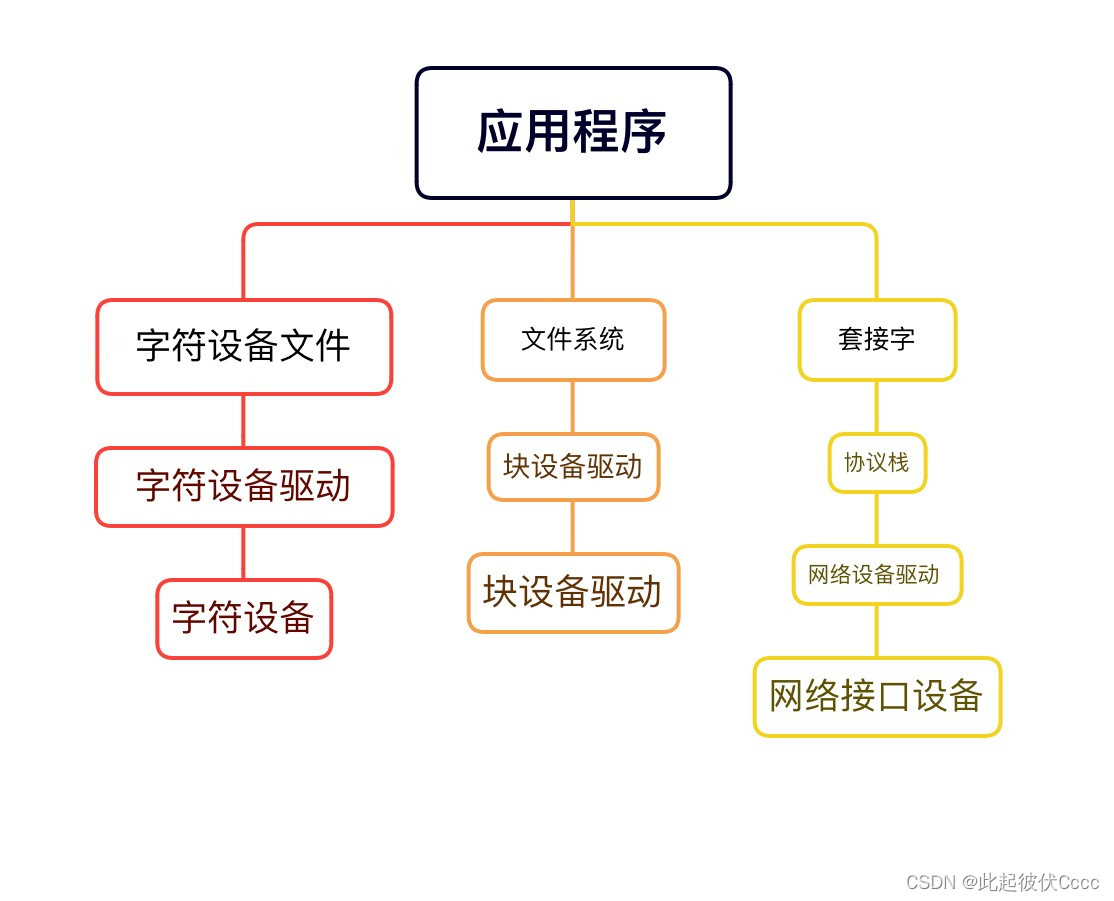
2.被驱动设备分类
- 字符设备:
指只能一个字节一个字节读写的设备,不能随机读取设备内存中的某一数据,读取数据需要按照先后顺序。字符设备是面向流的设备,常见的字符设备有鼠标、键盘、串口、控制台和LED设备等,字符设备驱动程序通常至少要实现open、close、read和write的系统调用,字符终端(/dev/console)和串口(/dev/ttyS0以及类似设备)就是两个字符设备,它们能很好的说明“流”这种抽象概念。 - 块设备:
指可以从设备的任意位置读取一定长度数据的设备。块设备包括硬盘、磁盘、U盘和SD卡等。 - 网络设备:
网络设备可以是一个硬件设备,如网卡; 但也可以是一个纯粹的软件设备, 比如回环接口(lo).一个网络接口负责发送和接收数据报文。
3.设备文件的主设备号和次设备号
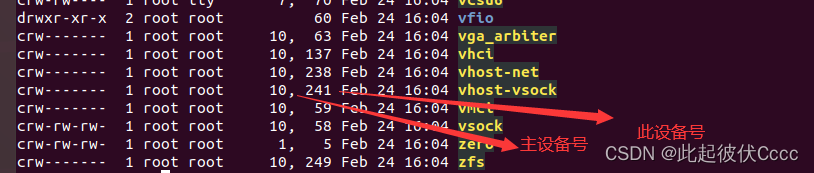
Linux的设备管理是和文件系统紧密结合的,各种设备都以文件的形式存放在/dev目录下,称为设备文件,应用程序可以打开、关闭和读写这些设备文件,完成对设备的操作,就像操作普通的数据文件一样。为了管理这些设备,系统为设备编了号,每个设备号又分为主设备号和次设备号。主设备号用来区分不同种类的设备,而次设备号用来区分同一类型的多个设备。
一个字符设备或者块设备都有一个主设备号和次设备号。主设备号和次设备号统称为设备号。主设备号用来表示一个特定的驱动程序。次设备号用来表示使用该驱动程序的各设备。例如一个嵌入式系统,有两个LED指示灯,LED灯需要独立的打开或者关闭。那么,可以写一个LED灯的字符设备驱动程序,可以将其主设备号注册成5号设备,次设备号分别为1和2。这里,次设备号就分别表示两个LED灯。
设备文件通常都在 /dev 目录下。
设备号的作用:
在内核空间中,存在一个驱动链表管理所用设备的驱动。驱动链表主要有两个功能,分别为添加(编写完驱动程序,加载到内核)功能和查找(调用驱动程序)功能。在这些过程中,驱动插入链表的顺序由设备号检索,这便是设备号的主要作用。
4.设备驱动整体调用过程
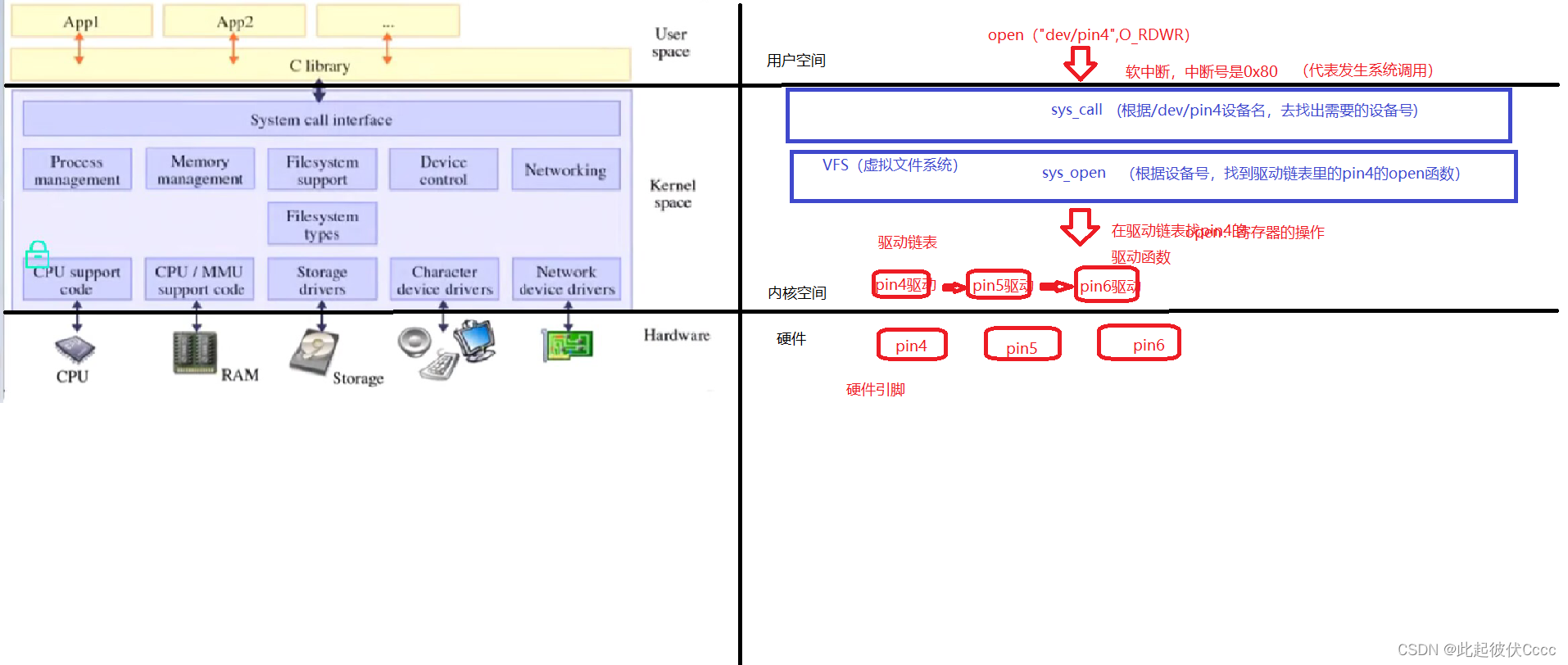
(1)C语言上层调用open函数。open(“dev/pin4”,O_RDWR);调用/dev下的pin4以可读可写的方式打开。对于上层open调用到内核时会发生一次软中断中断号是0X80,从用户空间进入到内核空间
(2)open会调用到system_call(内核函数),system_call会根据/dev/pin4设备名,去找出需要的设备号。
(3)再调到虚拟文件VFS ,调用VFS里的sys_open,sys_open会找到在驱动链表里面,根据主设备号和次设备号找到引脚4里的open函数,引脚4里的open是对寄存器操作及对硬件的操作。
二、基于框架编写驱动代码
1.驱动代码框架
#include <linux/fs.h> //file_operations声明#include <linux/module.h> //module_init module_exit声明
#include <linux/init.h> //__init __exit 宏定义声明
#include <linux/device.h> //class devise声明
#include <linux/uaccess.h> //copy_from_user 的头文件
#include <linux/types.h> //设备号 dev_t 类型声明
#include <asm/io.h> //ioremap iounmap的头文件static struct class *pin4_class;
static struct device *pin4_class_dev;static dev_t devno; //设备号
static int major =231; //主设备号
static int minor =0; //次设备号
static char *module_name="pin4"; //模块名static int pin4_open(struct inode *inode,struct file *file)
{printk("pin4_open\n"); //内核的打印函数和printf类似return 0;
}static ssize_t pin4_write(struct file *file,const char __user *buf,size_t count, loff_t *ppos)
{printk("pin4_write\n");return 0;
}
static struct file_operations pin4_fops = {.owner = THIS_MODULE,.open = pin4_open,//当应用层调用open函数时,内核会调用pin4_open..write = pin4_write,//当应用层调用write函数时,内核会调用pin4_write.
};int __init pin4_drv_init(void) //真实的驱动入口
{int ret;devno = MKDEV(major,minor); //创建设备号ret = register_chrdev(major, module_name,&pin4_fops); //注册驱动 告诉内核,把这个驱动加入到内核驱动的链表中pin4_class=class_create(THIS_MODULE,"myfirstdemo");//由代码在dev下自动生成设备pin4_class_dev =device_create(pin4_class,NULL,devno,NULL,module_name); //创建设备文件return 0;
}void __exit pin4_drv_exit(void)
{device_destroy(pin4_class,devno);class_destroy(pin4_class);unregister_chrdev(major, module_name); //卸载驱动}module_init(pin4_drv_init); //入口
module_exit(pin4_drv_exit);
MODULE_LICENSE("GPL v2");`
2.驱动代码的编译和测试
(1)进入Linux源码树目录下的驱动目录,因为驱动的是字符设备,所以进入的是驱动目录下的char目录。/home/zh/SYSTEM/linux-rpi-4.14.y/drivers/char

(2)将驱动代码放到上述目录下

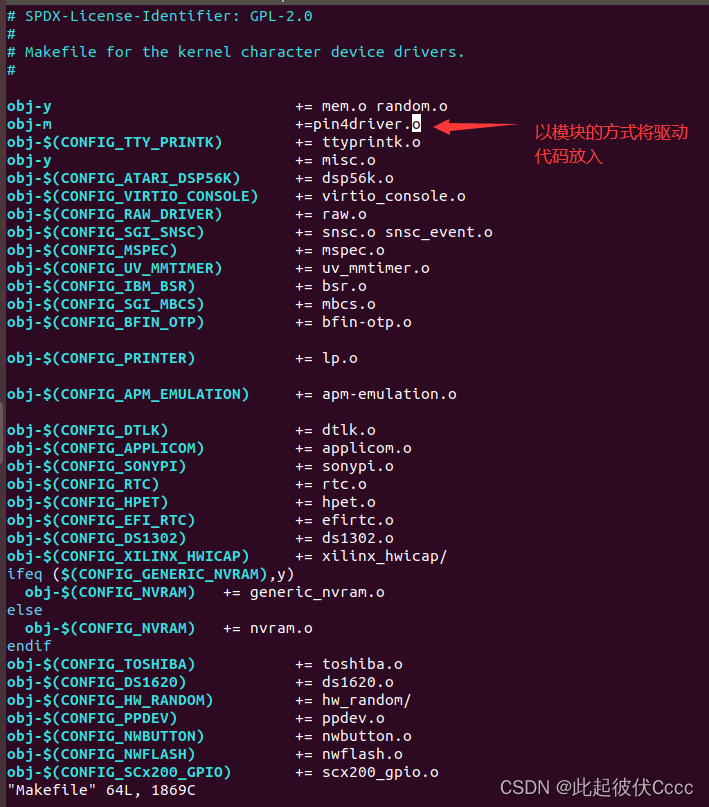
(3)修改Makefile文件
在字符驱动目录下 打开Makefile文件,并以模块的方式将驱动载入:
(4)模块编译
进入源码树目录进行模块化编译,键入
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make modules
(5)将编译好的驱动模块传到树莓派中
scp ./drivers/char/pin4driver.ko pi@192.168.169.221:/home/pi

加载内核驱动模块,在dev/目录下生成pin4驱动
sudo insmod pin4driver.kormmod pin4driver.ko //卸载驱动模块

(6)给pin4驱动加权限
sudo chmod 666 /dev/pin4
(7)驱动程序测试
pin4test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <unistd.h>
#include <string.h>
int main(int argc, char const *argv[])
{/* code */int fd;fd = open("/dev/pin4",O_RDWR);write(fd,"hello",strlen("hello"));return 0;
}
执行测试程序后用dmesg 查看内核打印信息发现打印了驱动函数的内容

三、树莓派I/O口驱动的编写
这里以驱动树莓派pin4引脚置0或置1为例。
1.微机的总线地址、物理地址、虚拟地址介绍
(1)总线地址
地址总线(Address Bus)是一种计算机总线,是CPU或有DMA能力的单元,用来沟通这些单元想要访问(读取/写入)计算机内存组件/地方的物理地址。
地址总线决定了cpu所能访问的最大内存空间的大小,即cpu能访问的内存范围。
比如:装了32位的win 7 系统,内存8G,可系统最大只能识别3.29G,所以要使用4G以上大内存就要用windows x64位系统。装了32位的操作系统CPU的访问范围是2^32 bit,就是4194304kbit,就是4G。树莓派也是32位 ,一个G的内存,但它只能访问949M,剩下的另作他用。
(2)物理地址
在存储器里以字节为单位存储信息,为正确地存放或取得信息,每一个字节单元给以一个唯一的存储器地址,称为物理地址(Physical Address),又叫实际地址或绝对地址。
物理地址它是在地址总线上,以电子形式存在的,使得数据总线可以访问主存的某个特定存储单元的内存地址。在和虚拟内存的计算机中,物理地址这个术语多用于区分虚拟地址。尤其是在使用内存管理单元(MMU)转换内存地址的计算机中,虚拟和物理地址分别指在经MMU转换之前和之后的地址。
(3)虚拟地址
虚拟地址顾名思义即为逻辑地址(基于算法的地址)。
CPU启动保护模式后,程序运行在虚拟地址空间中。注意,并不是所有的“程序”都是运行在虚拟地址中。CPU在启动的时候是运行在实模式的,Bootloader以及内核在初始化页表之前并不使用虚拟地址,而是直接使用物理地址的。
如果CPU寄存器中的分页标志位被设置,那么执行内存操作的机器指令时,CPU(准确来说,是MMU,即Memory Management Unit,内存管理单元)会自动根据页目录和页表中的信息,把虚拟地址转换成物理地址,完成该指令。
使用了分页机制之后,4G的地址空间被分成了固定大小的页,每一页或者被映射到物理内存,或者被映射到硬盘上的交换文件中,或者没有映射任何东西。对于一般程序来说,4G的地址空间,只有一小部分映射了物理内存,大片大片的部分是没有映射任何东西。物理内存也被分页,来映射地址空间。
2.通过树莓派芯片手册确定需要配置的寄存器
在BCM2835芯片手册的第六章描述了General Purpose I/O (GPIO)外设相关寄存器。
这里驱动pin4引脚需要用到的寄存器有:
1.GPIO Function Select Registers (GPFSELn) 功能选择寄存器:
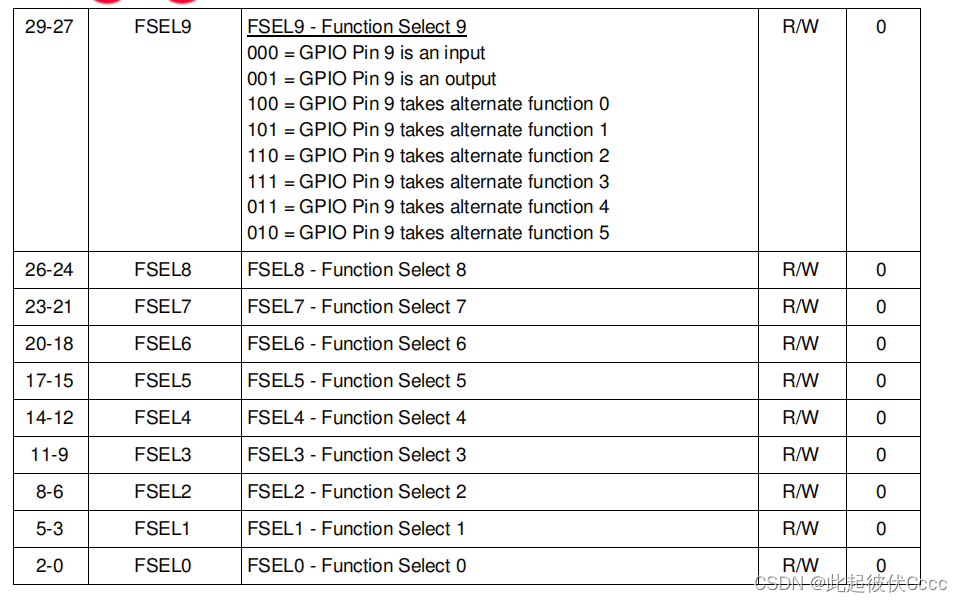
该寄存器共有五组,每个寄存器都有32位,以GPIO Alternate function select register 0为例,其中:
29-0位 :每三位对于一个引脚,比如29-27对应的是GPIO Pin 9,26-24对应的是GPIO Pin 8,且这三位取不同的值代表该三位对应的引脚选择不同的功能。比如,当29-27位为000时表示GPIO Pin 9是输入功能,29-27位为001时表示GPIO Pin 9是输出的功能。
2.GPIO Pin Output Set Registers (GPSETn) 置位寄存器:
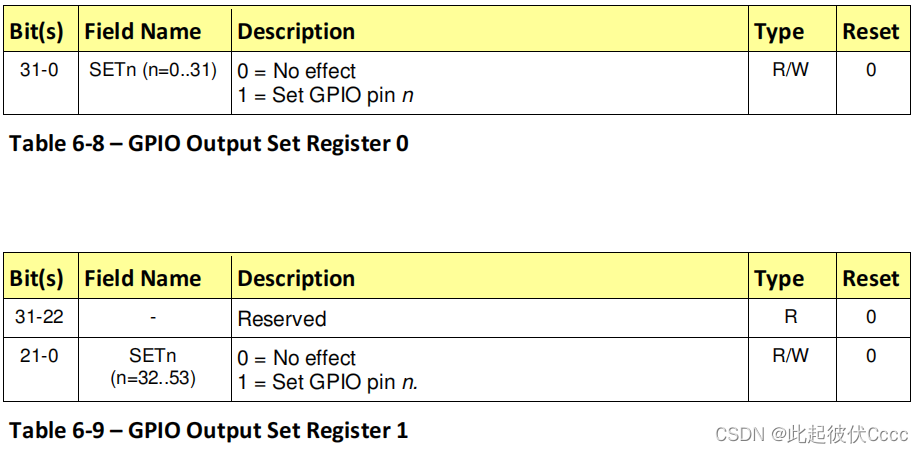
该寄存器共两组,每个寄存器都有32位,将寄存器某一位置1即将对应的引脚置1。
3.GPIO Pin Output Clear Registers (GPCLRn) 清0寄存器:
与置位寄存器用法一至,将对应位数引脚置0.
4.所需寄存器的地址说明
在编写驱动程序时,IO空间的起始地址位0X3F000000,加上GPIO的偏移量0X200000,因此GPIO的物理地址是从0X3F200000开始的,而编程所需的地址是虚拟地址,需要通过MMU内存虚拟化管理将地址映射到虚拟地址上
3.根据驱动框架编写树莓派Pin4引脚的驱动
驱动代码
pin4driver.c
#include <linux/fs.h> //file_operations声明
#include <linux/module.h> //module_init module_exit声明
#include <linux/init.h> //__init __exit 宏定义声明
#include <linux/device.h> //class devise声明
#include <linux/uaccess.h> //copy_from_user 的头文件
#include <linux/types.h> //设备号 dev_t 类型声明
#include <asm/io.h> //ioremap iounmap的头文件static struct class *pin4_class;
static struct device *pin4_class_dev;static dev_t devno; //设备号
static int major =231; //主设备号
static int minor =0; //次设备号
static char *module_name="pin4"; //模块名//首先定义所要用的寄存器,为了防止地址被编译器优化需要用到volatile关键字
volatile unsigned int *GPFSEL0 = NULL;
volatile unsigned int *GPSET0 = NULL;
volatile unsigned int *GPCLR0 = NULL;static int pin4_open(struct inode *inode,struct file *file)
{printk("pin4_open\n"); //内核的打印函数和printf类似//配置引脚4的寄存器,将其配置为输出模式,即将GPFSEL0寄存器的第14-12位配置成001*GPFSEL0 &= 0XFFFF9FFF; //将第14,13位置0*GPFSEL0 |= 0X00001000; //将第12位置1return 0;
}static ssize_t pin4_write(struct file *file,const char __user *buf,size_t count, loff_t *ppos)
{int usercmd;printk("pin4_write\n");copy_from_user(&usercmd,buf,count);//获取应用层write函数写入的内容if(usercmd == 1){printk("set 1\n");*GPSET0 |=(0x1 << 4); //将Pin4引脚置1}else if (usercmd == 0){printk("set 0\n");*GPCLR0 |=(0X1 << 4);//将Pin4引脚置0}else{printk("undo\n");}return 0;
}static struct file_operations pin4_fops = {.owner = THIS_MODULE,.open = pin4_open,//当应用层调用open函数时,内核会调用pin4_open..write = pin4_write,//当应用层调用write函数时,内核会调用pin4_write.
};int __init pin4_drv_init(void) //真实的驱动入口
{int ret;devno = MKDEV(major,minor); //创建设备号ret = register_chrdev(major, module_name,&pin4_fops); //注册驱动 告诉内核,把这个驱动加入到内核驱动的链表中pin4_class=class_create(THIS_MODULE,"myfirstdemo");//由代码在dev下自动生成设备pin4_class_dev =device_create(pin4_class,NULL,devno,NULL,module_name); //创建设备文件GPFSEL0 = (volatile unsigned int *)ioremap(0X3f200000,4);//需要将物理地址映射位虚拟地址 ipremap第一个参数需要被映射的物理地址。第二个参数位映射的字节数GPSET0 = (volatile unsigned int *)ioremap(0X3f20001C,4);//通过芯片手册可以看到该寄存器在基础地址上偏移了1CGPCLR0 = (volatile unsigned int *)ioremap(0X3f200028,4);//通过芯片手册可以看到该寄存器在基础地址上偏移了28return 0;
}void __exit pin4_drv_exit(void)
{iounmap(GPFSEL0);iounmap(GPSET0);iounmap(GPCLR0);device_destroy(pin4_class,devno);class_destroy(pin4_class);unregister_chrdev(major, module_name); //卸载驱动
}module_init(pin4_drv_init); //入口
module_exit(pin4_drv_exit);
MODULE_LICENSE("GPL v2");测试代码():
pin4test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <unistd.h>
#include <string.h>
int main(int argc, char const *argv[])
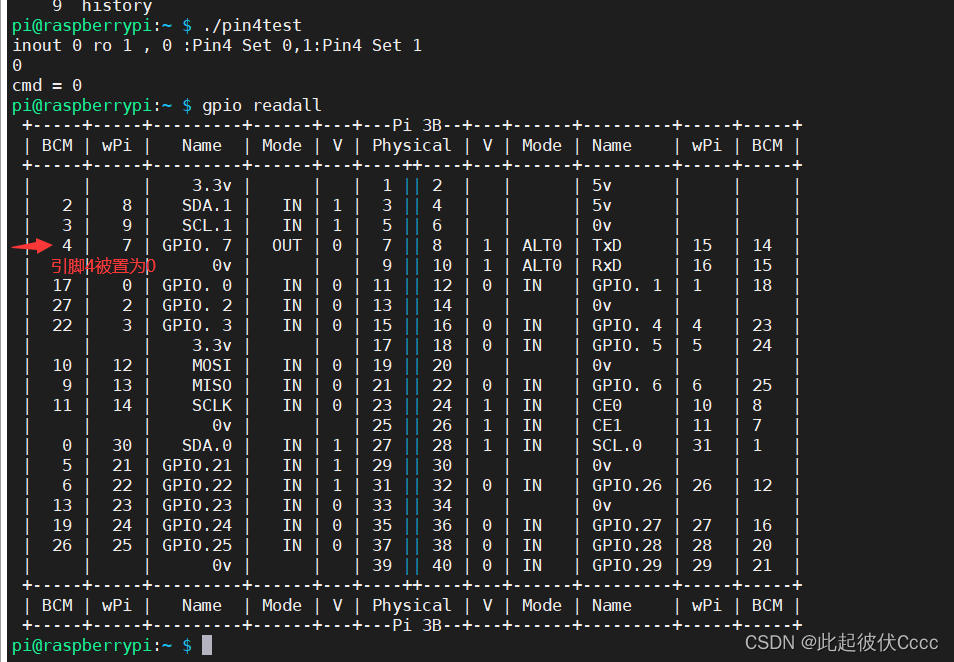
{int fd,cmd;fd = open("/dev/pin4",O_RDWR);printf("inout 0 ro 1 , 0 :Pin4 Set 0,1:Pin4 Set 1\n");scanf("%d",&cmd);printf("cmd = %d \n",cmd);write(fd,&cmd,1);return 0;
}将驱动代码编译后生成驱动模块放置在树莓派上进行测试
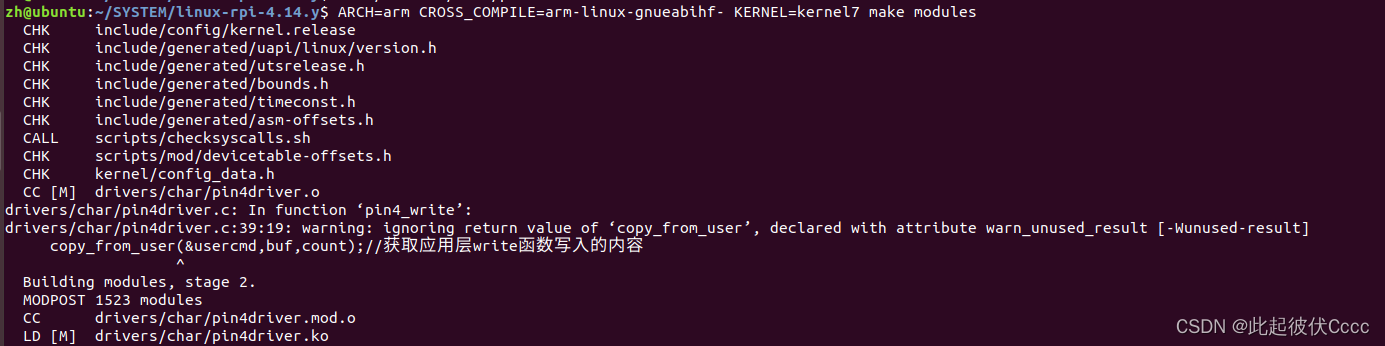
ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make modules
将生成的驱动模块拷贝至树莓派
scp ./drivers/char/pin4driver.ko pi@192.168.66.221:/home/pi
在树莓派上安装驱动并给驱动权限
sudo insmod pin4driver.ko
sudo chmod 666 /dev/pin4
运行测试程序: