当前位置: 首页 > news >正文 ardupilot开发 --- SLAM 篇 news 2025/8/29 19:36:11 1. 视觉SLAM 1.1 深度相机的种类 结构光相机,如 Kinect1.0、RealSenseTOF相机,如 Kinect2.0双目相机,如 ZED详细参考:https://zhuanlan.zhihu.com/p/282776636 1.2 视觉SLAM算法 2D slam 与3D slam 应用场景有哪些不同? 查看全文 http://www.lryc.cn/news/214697.html 相关文章: Elasticsearch:在你的数据上训练大型语言模型 (LLM) 拓展卡尔曼滤波EKF 第四章 应用SysML基本特性集的汽车示例 P2(断更)|系统建模语言SysML实用指南学习 Vue入门——核心知识点 使用opencv的tracking模块跟踪目标 Debian或Ubuntu静态交叉编译arm和aarch64 最新ai系统ChatGPT程序源码+详细搭建教程+以图生图+Dall-E2绘画+支持GPT4+Midjourney绘画 【设计模式】第16节:行为型模式之“命令模式” 安装pytorch报错torch.cuda.is_available()=false的解决方法 自定义表格的表头根据后端的数据进行筛选是否进行自定义表头添加按钮 海上风电应急救援vr模拟安全培训提高企业风险防范能力 自定义SpringBoot启动图标 diffusers-Tasks 文件下载漏洞, 漏洞原理, 测试方法, 漏洞防御, 常见敏感路径 【零参考GAN:Pansharpening】 Nacos 注册中心介绍与实操 基于51单片机的智能手机充电器设计 nginx 和gateway配置实现动静分离和反向代理 【深度学习实验】网络优化与正则化(二):基于自适应学习率的优化算法详解:Adagrad、Adadelta、RMSprop 系统韧性研究(3)| 工程系统韧性要求 .net 5 发布后swagger页面不显示问题 Spring Boot 3 整合 xxl-job 实现分布式定时任务调度,结合 Docker 容器化部署(图文指南) 1985-2020年我国30m土地利用覆盖数据介绍 Django 社区志愿者管理系统 wordpress如何修改数据库里用户ID下一个自增值的开始数字 利用chatgpt大语言模型来做数据预处理 【机器学习】五、贝叶斯分类 k8s 资源管理方式 Golang Gin 接口返回 Excel 文件 实战之巧用header头
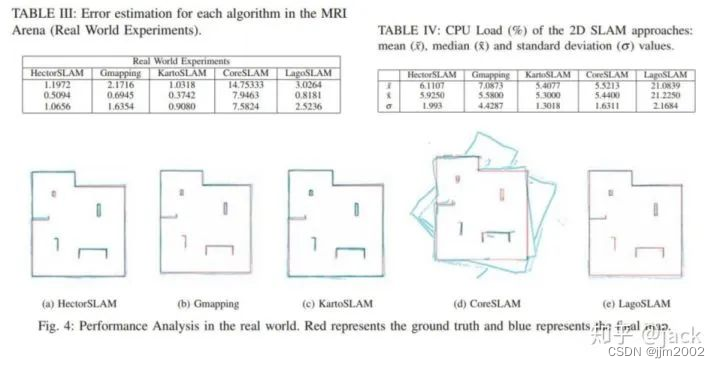
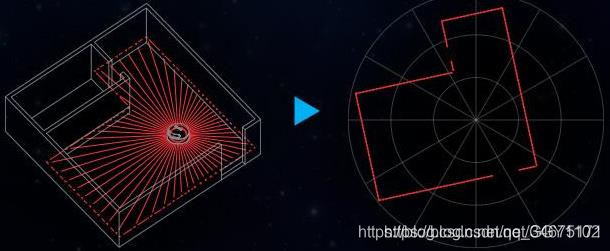
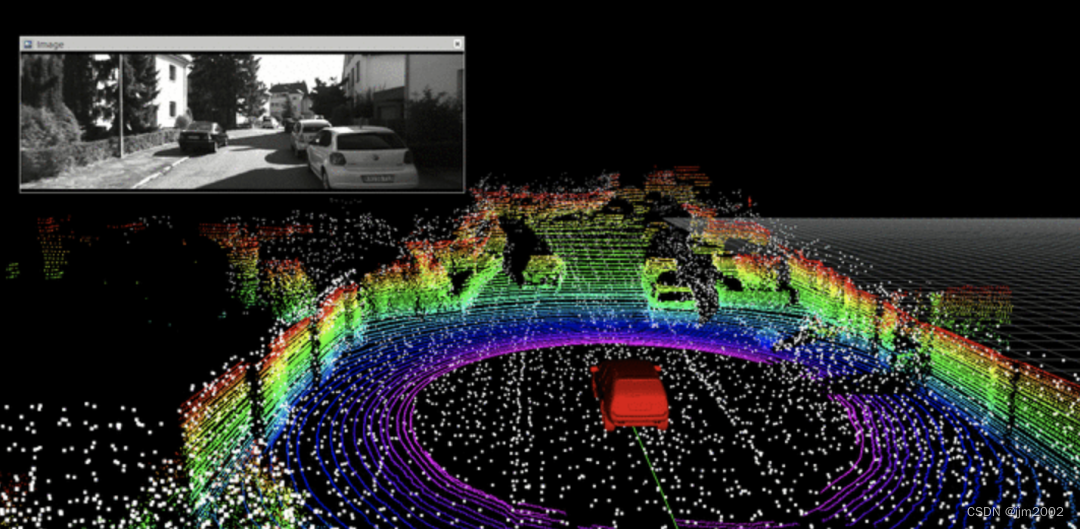
1. 视觉SLAM 1.1 深度相机的种类 结构光相机,如 Kinect1.0、RealSenseTOF相机,如 Kinect2.0双目相机,如 ZED详细参考:https://zhuanlan.zhihu.com/p/282776636 1.2 视觉SLAM算法 2D slam 与3D slam 应用场景有哪些不同? 查看全文 http://www.lryc.cn/news/214697.html 相关文章: Elasticsearch:在你的数据上训练大型语言模型 (LLM) 拓展卡尔曼滤波EKF 第四章 应用SysML基本特性集的汽车示例 P2(断更)|系统建模语言SysML实用指南学习 Vue入门——核心知识点 使用opencv的tracking模块跟踪目标 Debian或Ubuntu静态交叉编译arm和aarch64 最新ai系统ChatGPT程序源码+详细搭建教程+以图生图+Dall-E2绘画+支持GPT4+Midjourney绘画 【设计模式】第16节:行为型模式之“命令模式” 安装pytorch报错torch.cuda.is_available()=false的解决方法 自定义表格的表头根据后端的数据进行筛选是否进行自定义表头添加按钮 海上风电应急救援vr模拟安全培训提高企业风险防范能力 自定义SpringBoot启动图标 diffusers-Tasks 文件下载漏洞, 漏洞原理, 测试方法, 漏洞防御, 常见敏感路径 【零参考GAN:Pansharpening】 Nacos 注册中心介绍与实操 基于51单片机的智能手机充电器设计 nginx 和gateway配置实现动静分离和反向代理 【深度学习实验】网络优化与正则化(二):基于自适应学习率的优化算法详解:Adagrad、Adadelta、RMSprop 系统韧性研究(3)| 工程系统韧性要求 .net 5 发布后swagger页面不显示问题 Spring Boot 3 整合 xxl-job 实现分布式定时任务调度,结合 Docker 容器化部署(图文指南) 1985-2020年我国30m土地利用覆盖数据介绍 Django 社区志愿者管理系统 wordpress如何修改数据库里用户ID下一个自增值的开始数字 利用chatgpt大语言模型来做数据预处理 【机器学习】五、贝叶斯分类 k8s 资源管理方式 Golang Gin 接口返回 Excel 文件 实战之巧用header头