关键路径及关键路径算法[C/C++]
文章目录
- 关键路径
- 引例
- AOE网
- 关键路径与关键活动
- 关键路径算法
- 引例与原理
- 关键路径算法的实现
- 边的存储结构
- 代码实现
- 运行示例
关键路径
关于拓扑排序的内容见拓扑排序详解
引例
通过拓扑排序我们可以解决一个工程是否可以顺序进行的问题,拓扑排序把一个工程分成了若干个流水级,只有当前流水级的工作完成才能进入下一个流水级,然而有时候我们还要解决工程完成的最短时间问题。比如说,造一辆汽车,我们要先造各种各样的零件、部件,最终再组装成车。
这些零部件都是在流水线上同时生产的,假如造一个轮子需要0.5天,造一个发动机需要3天,造一个车底盘需要2天,造一个外壳需要2天,造其他零部件需要2天,全部零部件集中到一处需要0.5天,组装成车需要2天,那么我们生产一辆车最短需要几天呢?
如果回答说把所有时间加起来,假如所有活动是串行的话,那么自然是每个活动时间相加,但是这些零件是分别在流水线上同时生产的,也就是说生产发动机的3天内我们可能已经生产了6个轮子,1.5个外壳,1.5个底盘了,而车的组装是在所有零部件都生产好之后才可以进行的,因此最短时间应该是先导活动中时间最长的发动机3天+集中零部件0.5天+组装车的2天,一共5.5天完成一辆车的生产。
因此,我们如果要对一个流程图求最短完成时间,就要分析它们的拓扑关系,并找到其中的关键流程,这个流程的时间就是最短时间。
AOE网
基于我们拓扑排序中AOV网(Activity On Vertex Network),我们根据求流程的最短时间的需求,提出一个新的概念。在一个表示工程的带权有向图中,用顶点表示事件,用有向边表示活动,边上的权值表示活动的持续时间,这种有向图的边表示活动的网,我们称之为AOE网(Activity On Edge Network).
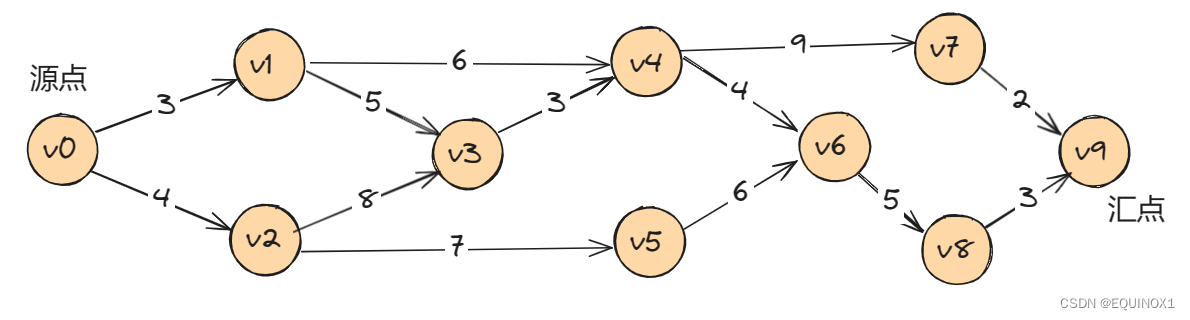
我们把AOE网中入度为0的点称为始点或源点,出度为0的点称为终点或汇点,它们分别代表工程的开始和结束,所以正常情况下,AOE网只有一个源点和一个汇点。如下图中,顶点vi代表一个事件,弧<vi , vj>则表示一个活动,其权值代表活动的持续时间。
AOE网有着明显的工程特性,只有某顶点的事件发生后,由该顶点出发的各项活动才能开始。只有进入该顶点的所有活动都已经结束,该顶点的事件才能发生。
AOE网和AOV网有着相似之处,二者都是对工程进行建模,但又有很大差别。AOV网用顶点表示活动,它描述了活动间的偏序关系,AOE网则用边来表示活动,边上的权值表示活动的持续时间。仍以我们汽车的流水线生产为例,其AOV网和AOE网的对比体现了二者的差别。AOE网是建立在活动的偏序关系(或制约关系)没有矛盾的基础上,再来分析整个工程至少需要多少时间,以及为了缩短工程时间,可以加快哪些活动,或者对于各个活动ddl的限制等。

关键路径与关键活动
我们把路径上各个活动所持续的时间之和称为路径长度,从源点到汇点具有最大长度的路径叫关键路径,在关键路径上的活动叫关键活动。显然就上图的AOE网而言,开始→发动机完成→部件集中到位→组装完成就是关键路径,路径长度为5.5。
我们发现,如果我们加快非关键路径上的活动,并不会缩短整个工程的时间,即使一个轮子只需要0.1的生产时间也无济于事,但是如果我们缩短了关键路径上关键活动的时间,如发动机缩短为2.5天,组装车缩短为1.5天,那么我们的关键路径长度就缩短为了4.5天。
所以我们如何去求关键路径呢?
关键路径算法
引例与原理
这是关于关键路径的一个很经典的例子。假设一个学生放学回家,除掉吃饭、洗漱外,到睡觉前有四小时空闲,而家庭作业需要两小时完成。不同的学生会有不同的做法,抓紧的学生,会在头两小时就完成作业,然后看看电视、读读课外书什么的;但也有超过一半的学生(比如我(悲))会在最后两小时才去做作业,要不是因为没时间,可能还要再拖延下去。这也没什么好奇怪的,拖延就是人性几大弱点之一。
这里做家庭作业这一活动的最早开始时间是四小时的开始,可以理解为0,而最晚开始时间是两小时之后马上开始,不可以再晚,否则就是延迟了,此时可以理解为2。显然,当最早和最晚开始时间不相等时就意味着有空闲。接着,老妈发现了孩子拖延的小秘密(太痛了x_x),于是买了很多的课外习题,要求你四个小时,不许有一丝空闲,省得你拖延或偷懒。此时整个四小时全部被占满,最早开始时间和最晚开始时间都是0,因此它就是关键活动了。也就是说,我们只需要找到所有活动的最早开始时间和最晚开始时间,并且比较它们,如果相等就意味着此活动是关键活动,活动间的路径为关键路径。如果不等,则就不是。
关键路径算法的实现
那么关键路径的求解过程如下:
-
用数组etv(earliest time of vertex)和ltv(latest time of vertex)来存储事件的最早/最晚发生时间
-
e t v [ k ] = { 0 , 当 k = 0 时 m a x { e t v [ i ] + l e n < v i , v k > } . , 当 k ≠ 0 且 < v i , v k > ∈ p [ k ] 时 etv[k] = \left\{\begin{matrix} 0\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ ,当k=0时\\ max\left \{ etv[i]+len<vi,vk>\right \} .,当k≠0且 <vi,vk>∈p[k]时 \end{matrix}\right. etv[k]={0 ,当k=0时max{etv[i]+len<vi,vk>}.,当k=0且<vi,vk>∈p[k]时
其中p[ k ]为所有到达vk的边集合,转移方程保证了事件k在etv[ k ]发生时,其所有先导活动都能完成
-
l t v [ k ] = { e t v [ k ] , 当 k = n − 1 时 m i n { l t v [ j ] − l e n < v k , v j > } , 当 k ≠ n − 1 且 < v k , v j > ∈ S [ k ] 时 ltv[k] = \left\{\begin{matrix} etv[k]\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ ,当k=n-1时\\ min\left \{ ltv[j]-len<vk,vj>\right \} ,当k≠n-1且 <vk,vj>∈S[k]时 \end{matrix}\right. ltv[k]={etv[k] ,当k=n−1时min{ltv[j]−len<vk,vj>},当k=n−1且<vk,vj>∈S[k]时
其中S[k]为vk发出的边集合,转移方程保证了事件k在ltv[ k ]发生时,其发出的所有活动到达的事件都能在其最早开始时间完成
-
活动的最早开始时间即其先导事件的最早发生时间,因此只有先导事件发生了,活动才能开始
-
活动的最晚开始时间是其抵达事件的最晚发生时间减去活动时长,活动再晚也不能等其到达的事件发生了才开始,所以要赶在到达的事件发生之前
这里我们使用邻接表来存储边。
边的存储结构
vector<int> etv, ltv; // 事件最早发生时间
stack<int> path; // 存储拓扑序列
struct Edge
{Edge(int a, int w) : adjvex(a), weight(w), _next(nullptr){}// int in;//边的起点,这里省去int adjvex;//边的终点int weight;//权值Edge *_next;//in发出的下一条边
};
代码实现
求解etv的过程就是一次拓扑排序,只不过加了行对于elv的更新,开始事件的etv显然是0,由开始事件往后由拓扑顺序更新etv
而求解ltv其实就是对于拓扑排序的逆过程,因为结束事件的etv和ltv显然相同,那么对拓扑序列逆向遍历,更新ltv
再根据ltv,etv和lte,ete的关系求寻找我们的关键活动
void TopoLogicalSort(vector<Edge *> &edges)
{int n = edges.size();etv.resize(n);vector<int> ind(n); // 记录入度for (auto e : edges){while (e){ind[e->adjvex]++;e = e->_next;}}queue<int> q;for (int i = 0; i < n; i++)if (!ind[i])q.push(i);int f;while (!q.empty()){f = q.front();q.pop();path.push(f); // 存储拓扑序列Edge *e = edges[f];while (e){if (!(--ind[e->adjvex]))q.push(e->adjvex);if (e->weight + etv[f] > etv[e->adjvex])// 如果事件f的etv + 活动e的时间晚于etv[adjvex],则更新事件adjvex的etv,保证adjvex的etv时,事件adjvex的所有先导活动都已完成etv[e->adjvex] = e->weight + etv[f];e = e->_next;}}
}
void CriticalPath(vector<Edge *> &edges)
{Edge *e = nullptr;int ete, lte; // 活动的最早最晚发生时间int n = edges.size(), t;TopoLogicalSort(edges);ltv.resize(n);for (int i = 0; i < n; i++)ltv[i] = etv[n - 1]; // 初始化最晚发生时间while (!path.empty()){t = path.top();path.pop();e = edges[t];while (e){if (etv[e->adjvex] - e->weight < ltv[t]) // 保证事件t如果在etv开始,发出的活动到达的事件都能在其各自etv完成ltv[t] = etv[e->adjvex] - e->weight;e = e->_next;}}for (int i = 0; i < n; i++){e = edges[i];ete = etv[i]; // 事件的最早发生时间和其发出活动的最早发生时间一致while (e){lte = ltv[e->adjvex] - e->weight;if (lte == ete){printf("<v%d-v%d> length:%d\n", i, e->adjvex, e->weight);break;}e = e->_next;}}
}
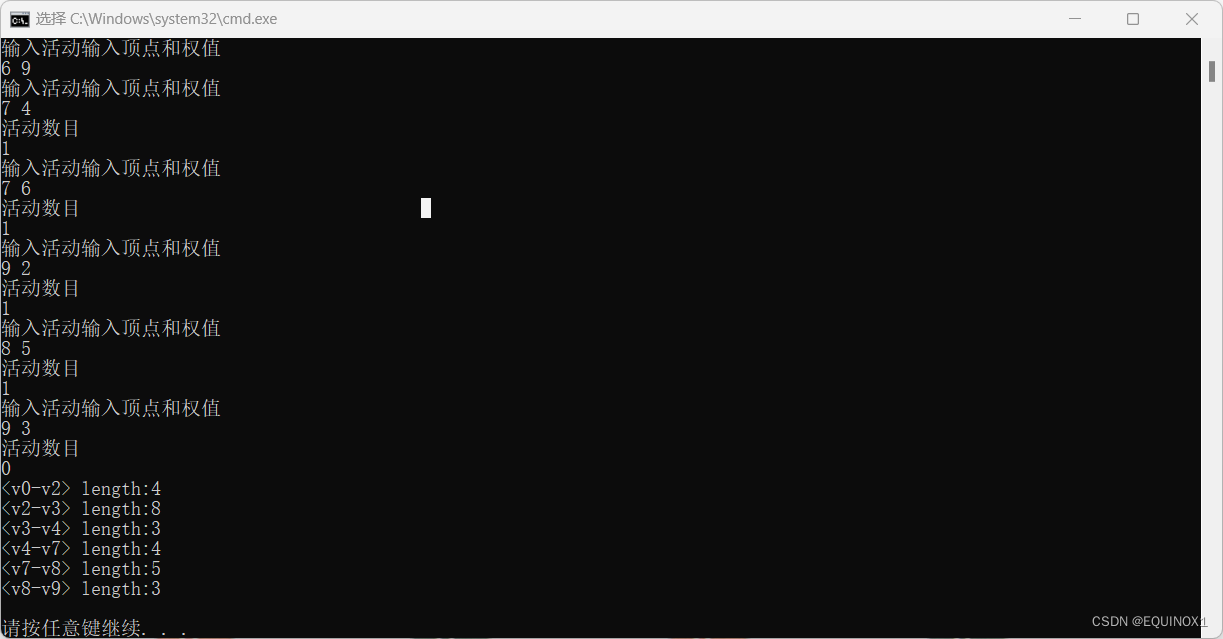
运行示例
运行代码
#include <iostream>
#include <vector>
#include <queue>
#include <stack>
using namespace std;
vector<int> etv, ltv; // 事件最早发生时间
stack<int> path; // 存储拓扑序列
struct Edge
{Edge(int a, int w) : adjvex(a), weight(w), _next(nullptr){}// int in;int adjvex;int weight;Edge *_next;
};
void TopoLogicalSort(vector<Edge *> &edges)
{int n = edges.size();etv.resize(n);vector<int> ind(n); // 记录入度for (auto e : edges){while (e){ind[e->adjvex]++;e = e->_next;}}queue<int> q;for (int i = 0; i < n; i++)if (!ind[i])q.push(i);int f;while (!q.empty()){f = q.front();q.pop();path.push(f); // 存储拓扑序列Edge *e = edges[f];while (e){if (!(--ind[e->adjvex]))q.push(e->adjvex);if (e->weight + etv[f] > etv[e->adjvex])// 如果事件f的etv + 活动e的时间晚于etv[adjvex],则更新事件adjvex的etv,保证adjvex的etv时,事件adjvex的所有先导活动都已完成etv[e->adjvex] = e->weight + etv[f];e = e->_next;}}
}
void CriticalPath(vector<Edge *> &edges)
{Edge *e = nullptr;int ete, lte; // 活动的最早最晚发生时间int n = edges.size(), t;TopoLogicalSort(edges);ltv.resize(n);for (int i = 0; i < n; i++)ltv[i] = etv[n - 1]; // 初始化最晚发生时间while (!path.empty()){t = path.top();path.pop();e = edges[t];while (e){if (etv[e->adjvex] - e->weight < ltv[t]) // 保证事件t如果在etv开始,发出的活动到达的事件都能在其各自etv完成ltv[t] = etv[e->adjvex] - e->weight;e = e->_next;}}for (int i = 0; i < n; i++){e = edges[i];ete = etv[i]; // 事件的最早发生时间和其发出活动的最早发生时间一致while (e){lte = ltv[e->adjvex] - e->weight;if (lte == ete){printf("<v%d-v%d> length:%d\n", i, e->adjvex, e->weight);break;}e = e->_next;}}
}
int main()
{int n, cnt, adj, w;cout << "请输入事件数量" << endl;cin >> n;Edge *e;vector<Edge *> edges(n, nullptr);for (int i = 0; i < n; i++){cout << "活动数目" << endl;cin >> cnt;for (int j = 0; j < cnt; j++){cout << "输入活动输入顶点和权值" << endl;cin >> adj >> w;e = new Edge(adj, w);e->_next = edges[i];edges[i] = e;}}CriticalPath(edges);return 0;
}