关于ABB 机器人多任务的建立
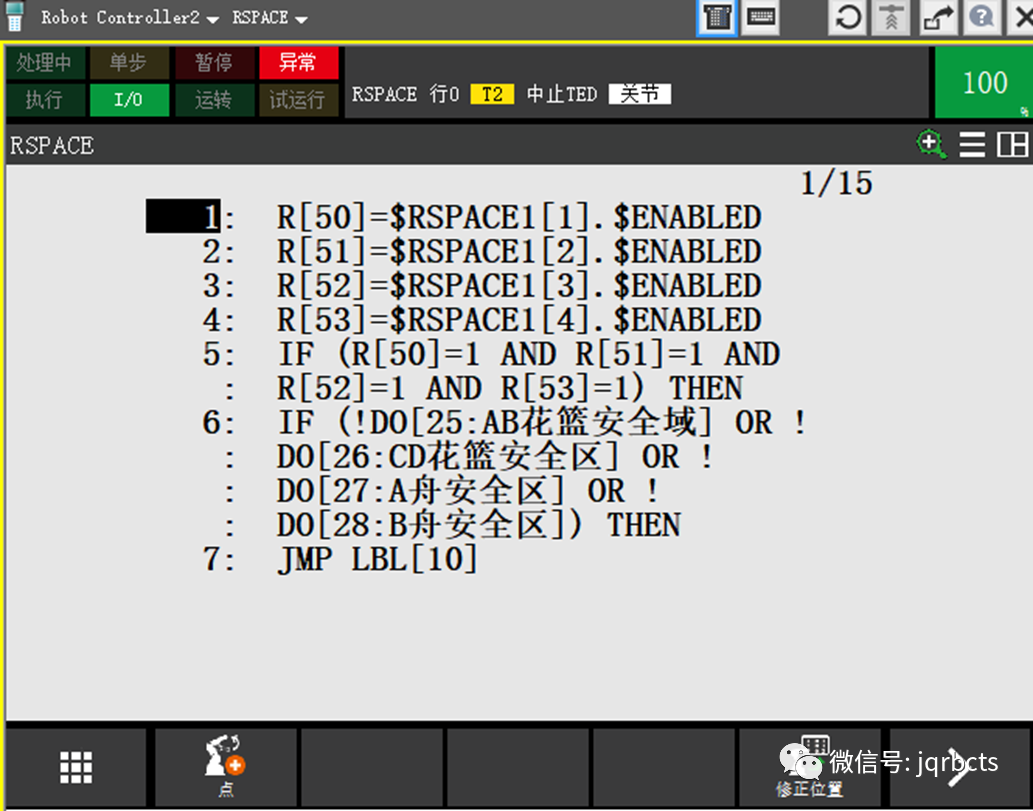
关于ABB 机器人多任务的建立.需要实时监控某一区域,或者某一信号,或者计件到达某一数量机器人自动停止报警,显示到示教器上,多任务可以实现,类似发那科机器人后台逻辑指令

当软件选项漏选或者少选可以选择修改选项,重新修改或者新增添加。
系统属性选项可以查看机器人的选项包包括多任务有没有开通,623-1

点击左上角选择控制面板选择TASK
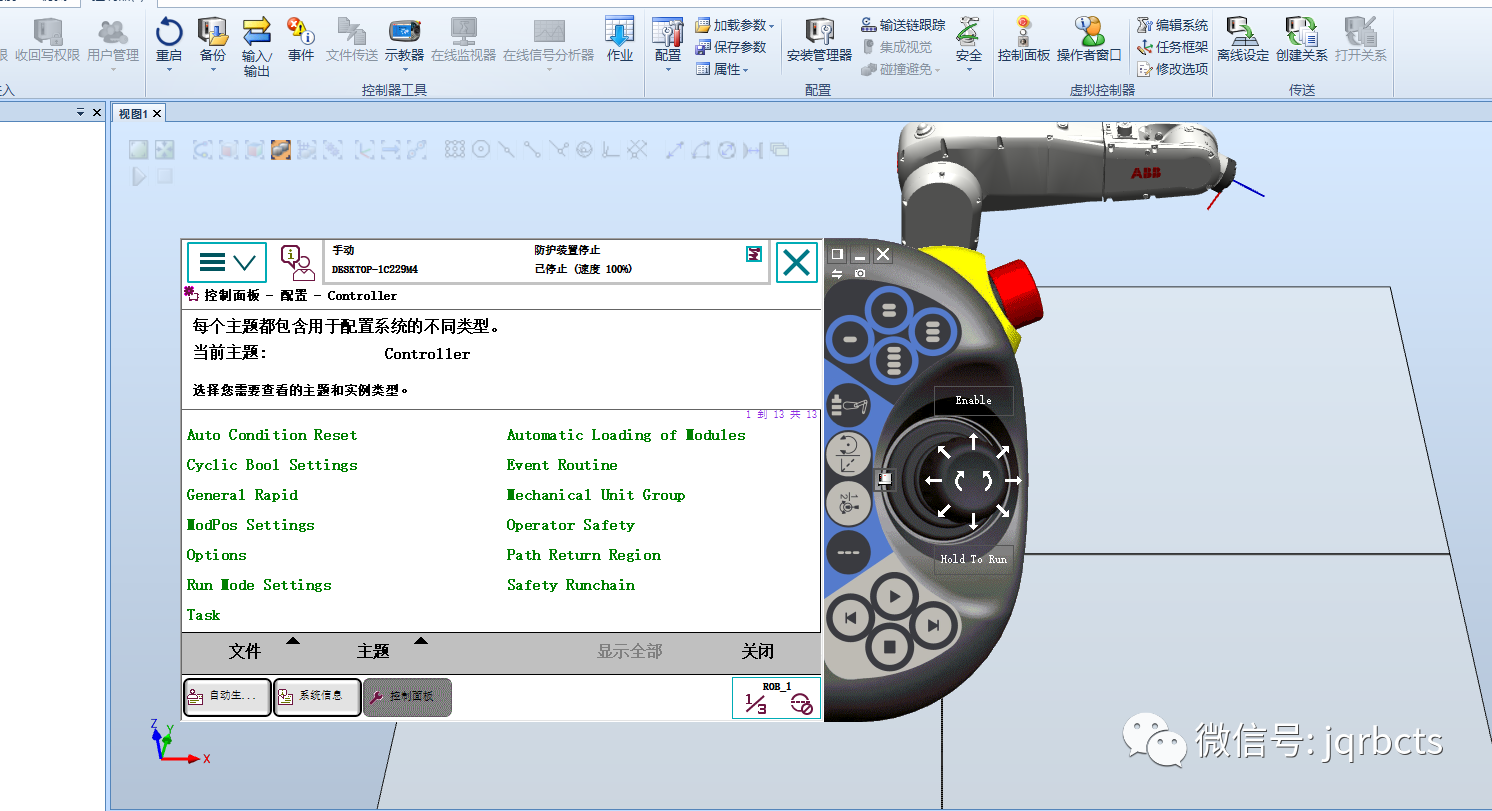
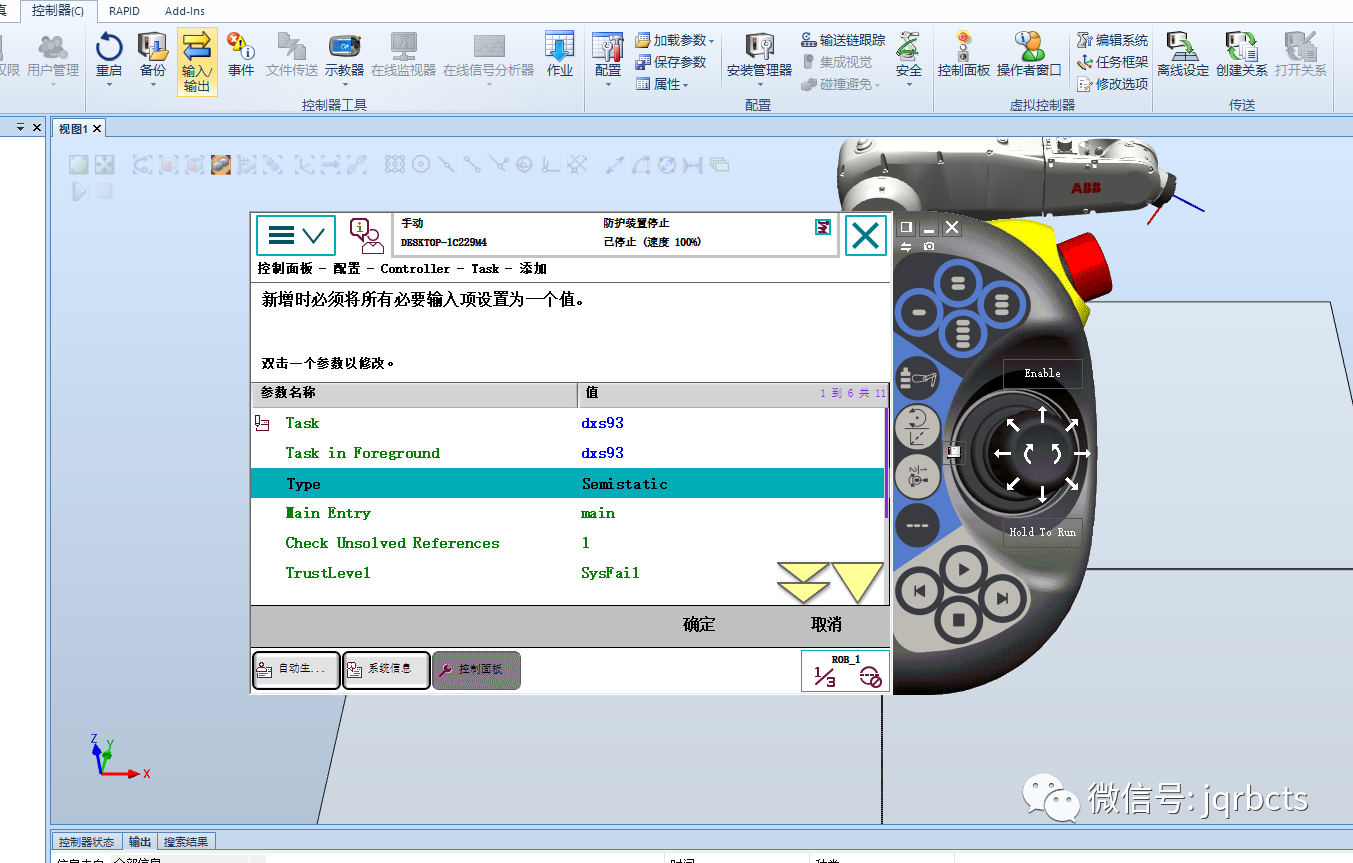
点击左上角选择控制面板选择TASK选择添加

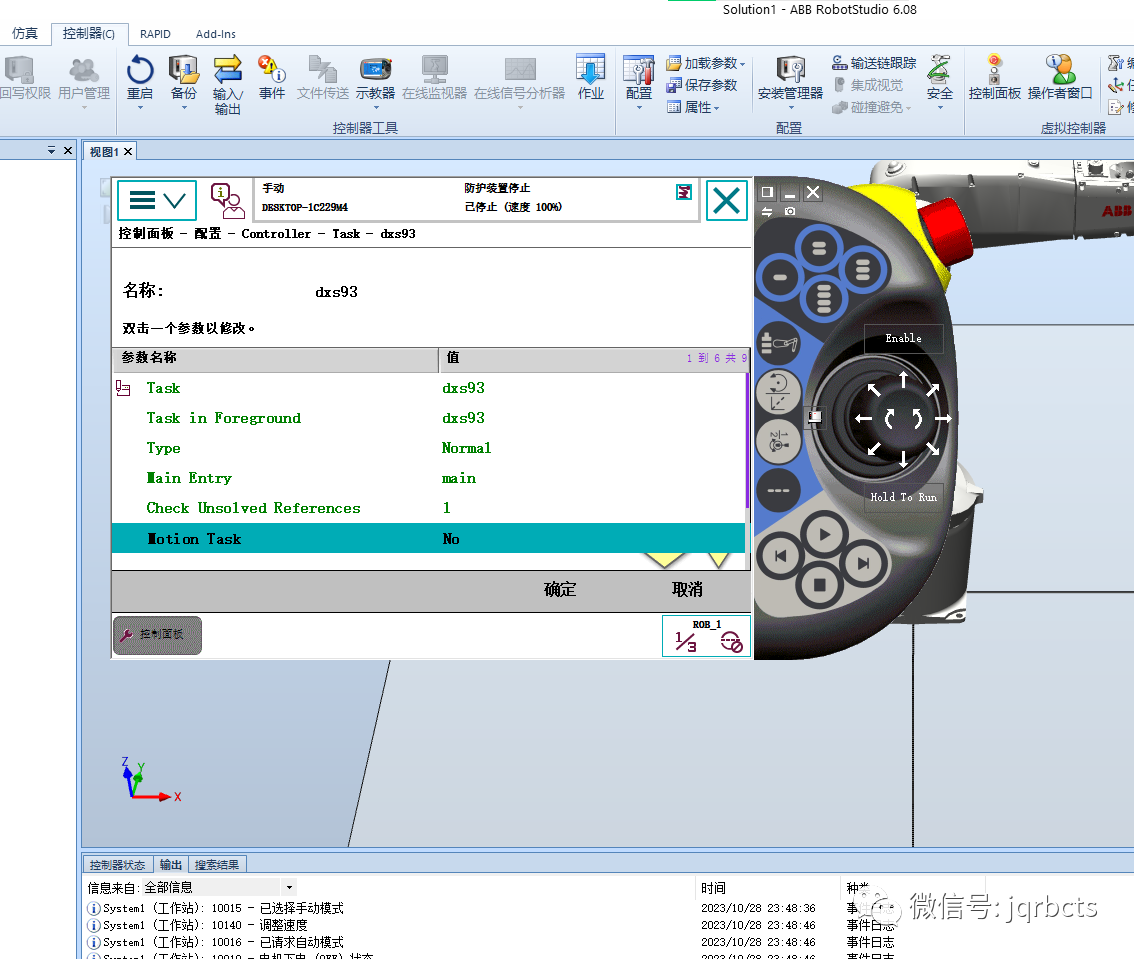
关于TASK需要设置任务名称,TASK IN FOREGROUND 需要设置当前机器人名称dxs93,关于第三行semistatic就是静态和半静态中不能有运动指令,normal可以使用运动控制指令,注意程序需要修改则选择normal模式,semistatic就是静态和半静态中不能修改程序,main entry写main
其他的可以不用设置
设置好后点击确定,重新启动控制器就可以看到下面界面了
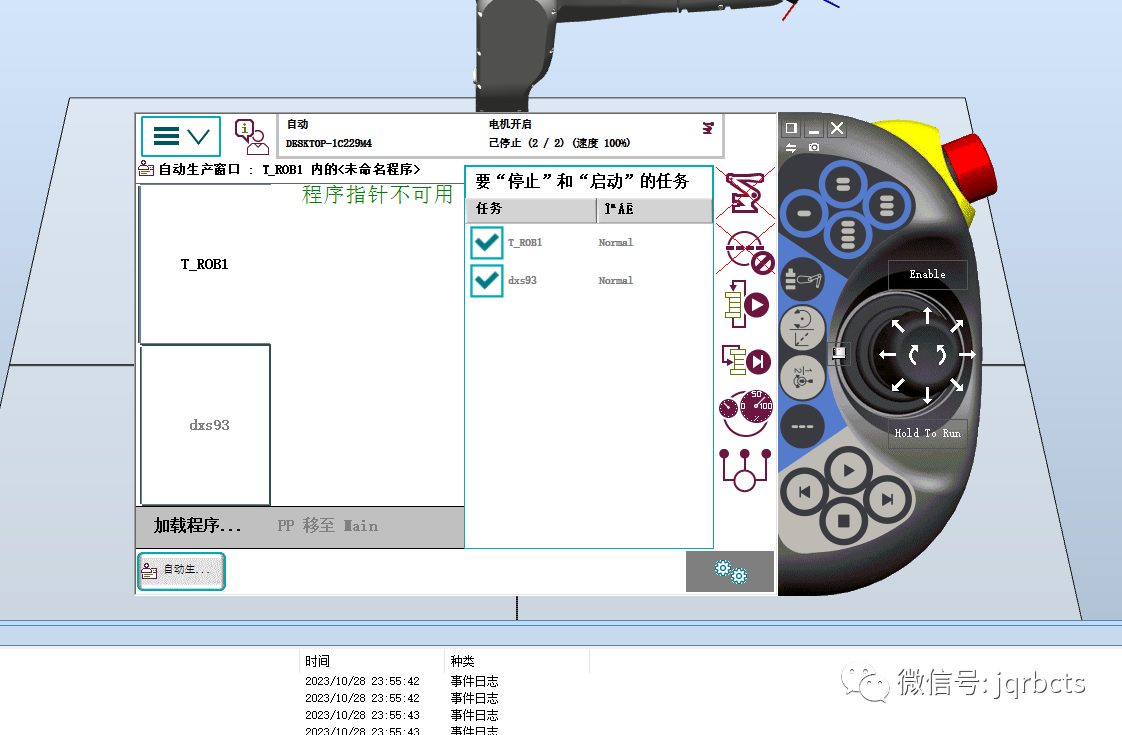
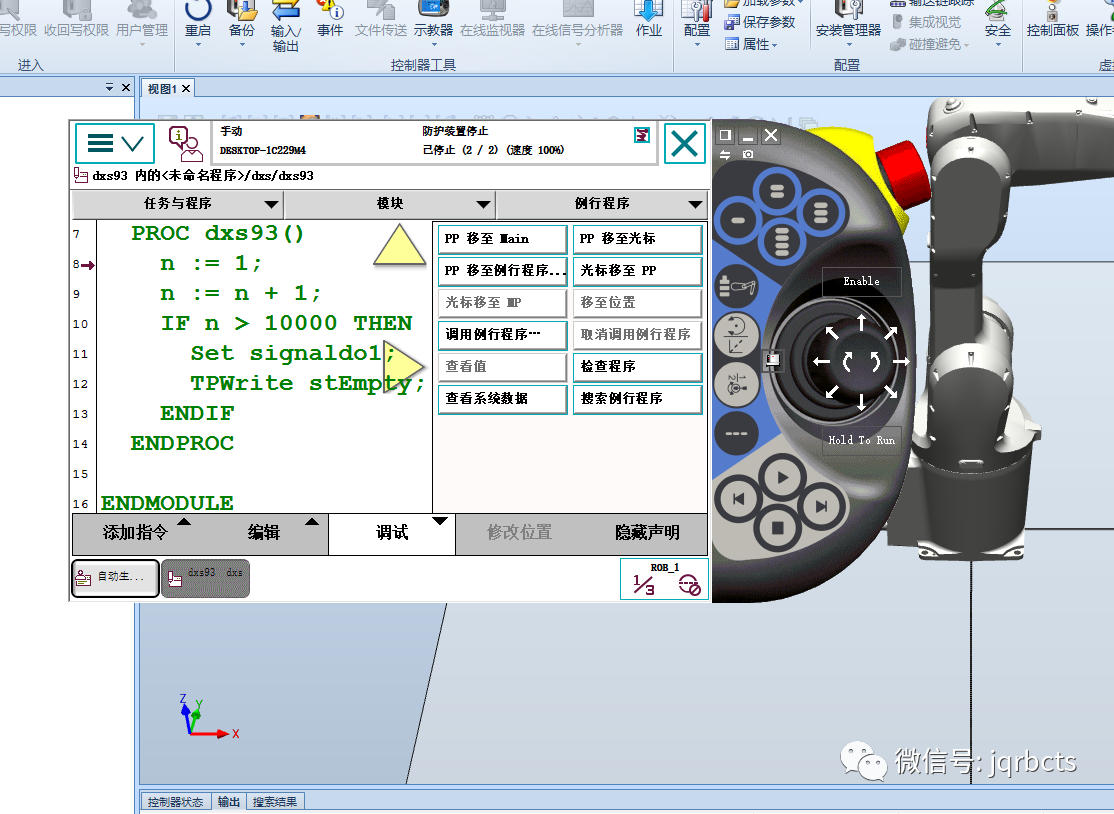
选中当前任务,设置全局变量后台实时监控
关于发那科机器人在安全区域内可以设置后台逻辑指令,机器人在安全区域内告诉plc不允许动,机器人不在安全区域内告诉plc允许动