Pytorch代码入门学习之分类任务(二):定义数据集
一、导包
import torch
import torchvision
import torchvision.transforms as transforms二、下载数据集
2.1 代码展示
# 定义数据加载进来后的初始化操作:
transform = transforms.Compose([# 张量转换:transforms.ToTensor(),# 归一化操作:transforms.Normalize((0.5,0.5,0.5),(0.5,0.5,0.5))
])trainset = torchvision.datasets.CIFAR10(root='./data',train=True,download=True,transform=transform)
testset = torchvision.datasets.CIFAR10(root='./data',train=False,download=True,transform=transform)
trainloader = torch.utils.data.DataLoader(trainset,batch_size=4,shuffle=True,num_workers=0)
testloader = torch.utils.data.DataLoader(testset,batch_size=4,shuffle=False,num_workers=0)
2.2 数据集介绍与下载方式
(1)数据集介绍:
CIFAR10数据集共60000个样本,其中有50000个训练样本和10000个测试样本。每个样本都是一张32*32像素的RGB图像(彩色图像),每个图像分为3个通道(R通道、G通道与B通道)。
CIFAR10数据集用来进行监督学习训练,每个样本包含一个标签值,其中有10类物体,标签值按照0~9来区分,分别是飞机( airplane )、汽车( automobile )、鸟( bird )、猫( cat )、鹿( deer )、狗( dog )、青蛙( frog )、马( horse )、船( ship )和卡车( truck )。
CIFAR10数据集的内容,如下图所示。

官网介绍链接:CIFAR-10 and CIFAR-100 datasets (toronto.edu)
(2)下载方式:
①下载文件:下载地址:https://pan.baidu.com/s/1Nh28RyfwPNNfe_sS8NBNUA
提取码:1h4x
②将下载好的文件重命名为cifar-10-batches-py.tar.gz
③将文件保存至相应地址下即可
2.3 transforms.Compose
transforms.Compose:相当于将所有需要的操作进行打包;
transforms.ToTensor:完成张量转换,pytorch处理的都是tensor数据,需要将读入的图片转换为tensor,其中tensor比普通图片的三通道多了一个通道—batch;
transforms.Normalize:归一化操作,对这一批次的数据进行归一,可以加速网络的收敛、放置梯度消失与梯度爆炸。
2.4 Dataset
Dataset是指定义好数据的格式和数据变换的形式,完成一些初始化的变化,然后送给网络(相当于将数据读入进去)。
torchvision.datasets.CIFAR10(调用数据集):第一个参数为数据集加载的地址、第二个参数为是否是训练数据或测试数据(训练数据为True,测试数据为False)、第三个为download-指该数据集是否本地下载,最后一个参数为要做哪些变化(transform是指数据变换格式,torchvision会将我们需要的数据进行格式变换)。
2.4 Dataloader
Dataloader:负责用iterative迭代的方式不断读入批次数据,一批次一批次将数据进行打包,送入网络进行训练、学习、测试。
torch.utils.data.DataLoader:第一个参数为数据,第二个参数为batch_size(代表Dataloader一次从这么多数据中拿多少个数据走),第三个参数为是否将数据打乱(训练的时候将数据打乱会让数据变得复杂,测试的时候不需要变得复杂),第四个参数为需要几线程进行读取数据(对于windows,默认为0就可以)
三、定义元组
定义元组进行类别名的中文转换:
classes = ('airplane','automobile','bird','car','deer','dog','frog','horse','ship','truck')四、定义显示函数与运行数据加载器
4.1 代码展示
import matplotlib.pyplot as plt
import numpy as np # 用这个包中的根据将tensor数据转换成矩阵数据def imshow(img):img = img / 2 + 0.5# tensor数据转换为numpynpimg = img.numpy()# 使用transpose进行数据转换-通道转换plt.imshow(np.transpose(npimg,(1,2,0)))plt.show()dataiter = iter(trainloader)
images,labels = dataiter.next()imshow(torchvision.utils.make_grid(images))print(labels)
print(labels[0],classes[labels[0]])
print(' '.join(classes[labels[j]] for j in range(4)))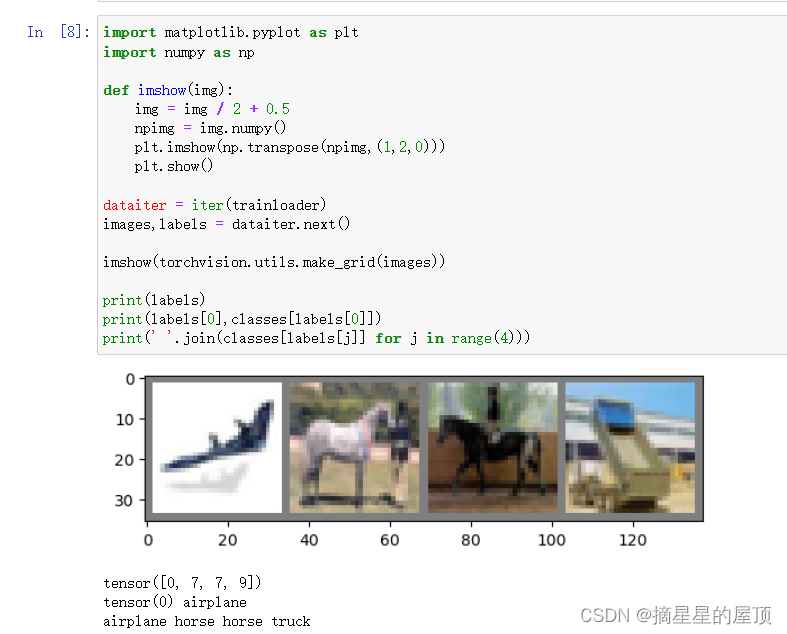
4.2 定义显示函数
tensor[batch,channel,H,W],而正常显示图片的顺序为H、W、channel,因此需要定义显示函数,通过反归一化才能变成正常的图片去显示。
4.3 定义迭代器
iter(trainloader) : 定义迭代器,读一次迭代的数据(batch_size=4,所以迭代器一次会读取四张图片);
torchvision.utils.make_grid:将多张图片拼接为一张图片。
参考:003 第一个分类任务1_哔哩哔哩_bilibili