辅助驾驶功能开发-功能规范篇(23)-2-Mobileye NOP功能规范
5.2 状态机要求
5.2.1 NOP/HWP 状态机
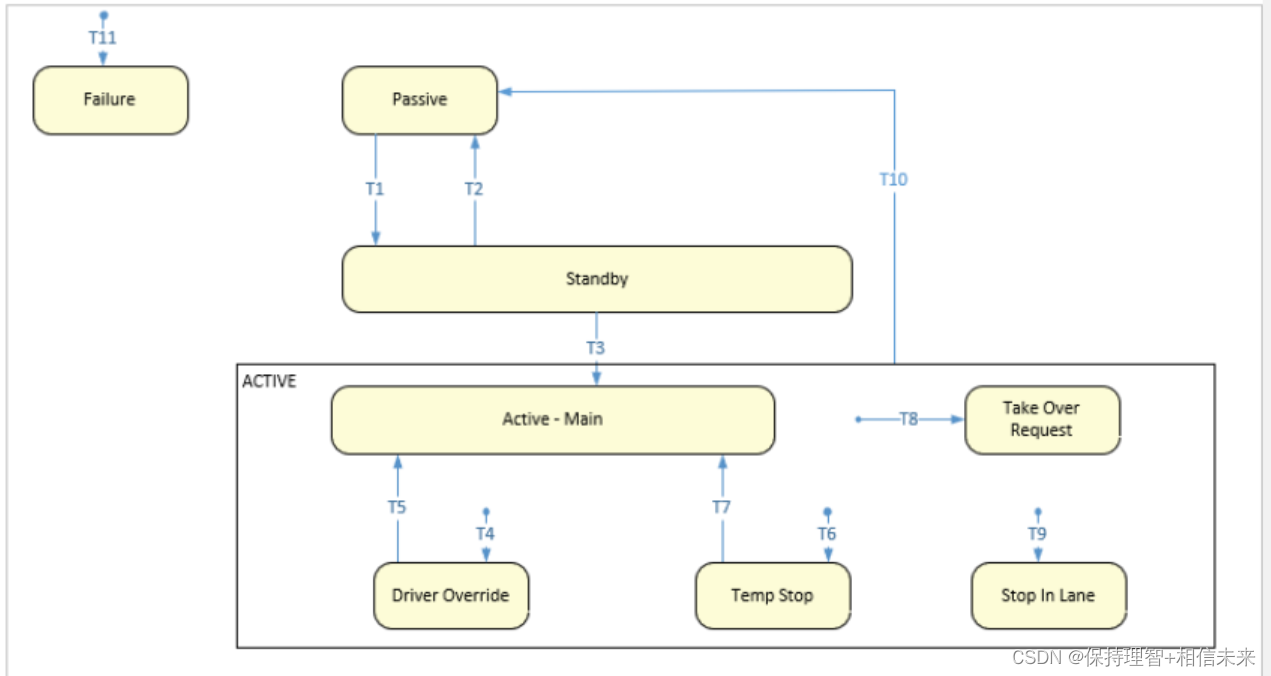
NOP/HWP状态机如下所示:
下表总结了这些状态:
| 状态 | 描述 |
| Passive | 不满足功能条件,功能无法控制车辆执行器。 |
| Standby | 满足功能条件。该功能不是由驾驶员激活的。功能不控制车辆执行器。 |
| Active - Main | 功能由驾驶员激活。功能是控制车辆。在某些情况下,驾驶员可以松手。 |
| Override | 驾驶员加速请求优先于功能的加速请求(如果更高)。 |
| Temp Stop | 当本车跟随前车停止时,系统进入Temp_Stop模式; 当车辆静止且驾驶员通过AD按钮激活HWP/NOP功能时,系统进入Temp_Stop模式; 不得根据 NOP 请求对动力传动系进行控制。 |
| Take Over | 当功能失效或ODD退出时,该功能应要求驾驶员接管。在此模式下,可以向驾驶员生成音频/视觉/触觉信号。驾驶员必须在 4 秒内接管车辆的控制权。 接管持续时间至少为 2 秒(即使驾驶员在此之前已接管控制权) |