球面坐标系下的三重积分
涉及知识点
- 三重积分
- 球面坐标系
- 点火公式
- 一些常见积分处理手法
球面坐标系定义
球面坐标系由方位角φ\varphiφ、仰角θ\thetaθ和距离rrr构成
直角坐标系(x,y,z)(x,y,z)(x,y,z)到球面坐标系的(r,φ,θ)(r,\varphi,\theta)(r,φ,θ)的转化规则如下:
{x=rsinφcosθy=rsinθsinφz=rcosφ\left\{ \begin{aligned} x & = & r\sin φ\cosθ \\ y & = & r\sin θ\sin φ \\ z & = & r\cos φ \end{aligned} \right. ⎩⎨⎧xyz===rsinφcosθrsinθsinφrcosφ

适用
适用于积分区域为球或球的部分、锥或锥的部分。
处理方法
按规则直角坐标系的积分式转换成球面坐标系就行
∭Ωf(x,y,z)dxdydz=∭Ωf(rsinφcosθ,rsinθsinφ,rcosφ)r2sinφdθdφdr\iiint \limits_{\Omega} f(x,y,z)dxdydz=\iiint \limits_{\Omega}f(r\sin φ\cosθ,r\sin θ\sin φ,r\cos φ)r^2\sin \varphi d\theta d\varphi drΩ∭f(x,y,z)dxdydz=Ω∭f(rsinφcosθ,rsinθsinφ,rcosφ)r2sinφdθdφdr
然后一般按如下顺序写出积分式:
∫dθ∫dφ∫f(r,θ,φ)dr\int d\theta \int d\varphi \int f(r,\theta,\varphi)dr∫dθ∫dφ∫f(r,θ,φ)dr
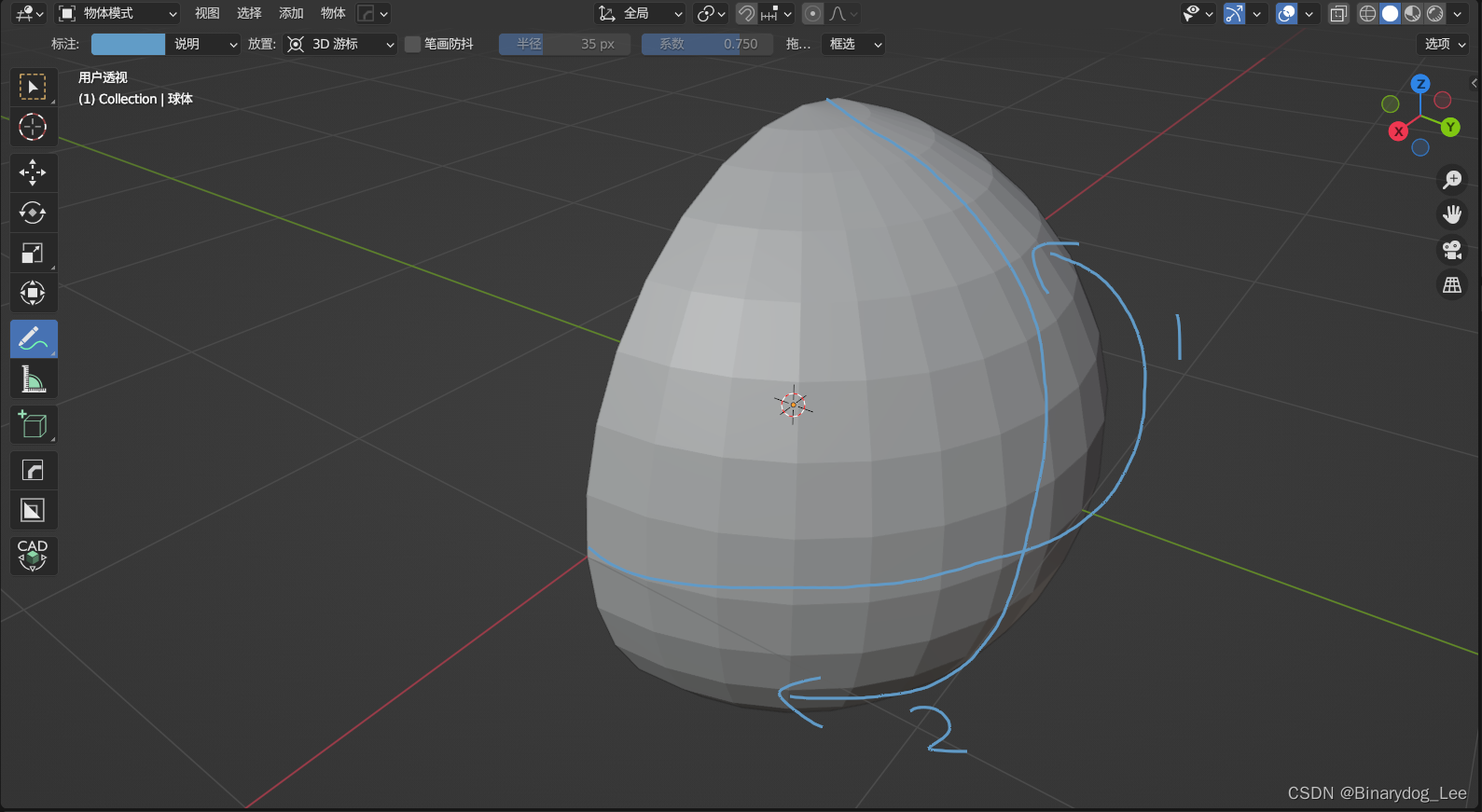
由于“后积先定限”,所以先处理方位角,即下图中1的轨迹,随后处理仰角,即下图中2的轨迹,两个角取值范围都是[0,2π][0,2\pi][0,2π]
例题
计算三重积分∭Ω(x2+y2)dv\iiint \limits_{\Omega}(x^2+y^2)dvΩ∭(x2+y2)dv其中Ω\OmegaΩ是右半球面x2+y2+z2=a2(y≥0,a>0)x^2+y^2+z^2=a^2\text{ }(y\ge 0,a>0)x2+y2+z2=a2 (y≥0,a>0)与xOzxOzxOz面所围成的区域
【解析】
Ω={0≤r≤a,0≤θ≤π,0≤φ≤π}\Omega = \{0\le r\le a,0\le \theta \le \pi,0\le \varphi \le \pi \}Ω={0≤r≤a,0≤θ≤π,0≤φ≤π}
本题即解如下积分
∭Ωr2sin2φ⋅r2sinφdrdθdφ\iiint \limits_{\Omega}r^2\sin^2\varphi ·r^2\sin \varphi drd\theta d\varphiΩ∭r2sin2φ⋅r2sinφdrdθdφ
即:
∫0πdθ∫0πdφ∫0ar4sin3φdr\int_0^\pi d\theta \int_0^\pi d\varphi \int_0^a r^4\sin^3\varphi dr∫0πdθ∫0πdφ∫0ar4sin3φdr
其中在drdrdr时sin3φ\sin^3\varphisin3φ是常量,可提出,剩下就是对r4r^4r4积分,即变为:
∫0πdθ∫0πsin3φ⋅a55dφ\int_0^\pi d\theta \int_0^\pi \sin^3\varphi · \frac{a^5}{5} d\varphi∫0πdθ∫0πsin3φ⋅5a5dφ
a55\frac{a^5}{5}5a5是常数可提出,并且这个对φ\varphiφ积分完要对θ\thetaθ积分,可以先变换顺序先对θ\thetaθ积分,则原式变为:
π5a3∫0πsin3φdφ\frac{\pi}{5}a^3 \int_0^\pi \sin^3\varphi d\varphi5πa3∫0πsin3φdφ
对于sin3φ\sin^3\varphisin3φ的积分步骤中用到了点火公式,过程如下:
∫0πsin3φdφ=∫0π2sin3φdφ+∫π2πsin3φdφ=23+∫π2πsin3φdφ\int_0^\pi \sin^3\varphi d\varphi=\int_0^{\frac\pi 2} \sin^3\varphi d\varphi+\int_{\frac\pi 2}^\pi \sin^3\varphi d\varphi=\frac23+\int_{\frac\pi 2}^\pi \sin^3\varphi d\varphi∫0πsin3φdφ=∫02πsin3φdφ+∫2ππsin3φdφ=32+∫2ππsin3φdφ
对于右侧的积分继续进行处理,令φ=π−t\varphi = \pi - tφ=π−t(好像算是区间再现公式)
∫π2πsin3φdφ=∫π20sin3(π−t)d(π−t)=∫π20sin3(π−t)d(−t)\int_{\frac\pi 2}^\pi \sin^3\varphi d\varphi=\int_{\frac\pi 2}^0 \sin^3(\pi - t) d(\pi - t)= \int_{\frac\pi 2}^0 \sin^3(\pi - t) d(- t)∫2ππsin3φdφ=∫2π0sin3(π−t)d(π−t)=∫2π0sin3(π−t)d(−t)
提出负号,上下限颠倒,则右侧积分式等于:
∫0π2sin3(π−t)dt\int_0^{\frac\pi 2} \sin^3(\pi - t) dt∫02πsin3(π−t)dt
根据sin3x\sin^3xsin3x的对称性,该式子又等于:
∫0π2sin3tdt=23\int_0^{\frac\pi 2} \sin^3t dt=\frac23∫02πsin3tdt=32
故原式等于
π5a3∫0πsin3φdφ=π5a3⋅(23+23)=415πa5\frac{\pi}{5}a^3 \int_0^\pi \sin^3\varphi d\varphi=\frac{\pi}{5}a^3·(\frac 23+\frac 23)=\frac4{15}\pi a^55πa3∫0πsin3φdφ=5πa3⋅(32+32)=154πa5
即最终结果