当前位置: 首页 > news >正文 SMAP(Soil Moisture Active and Passive)数据下载 news 2025/8/24 23:01:23 SMAP(Soil Moisture Active and Passive)数据下载 打开网站先注册登录用户 然后打开SMAP下载的网站 点击HTTPS File System进入下载页面 然后点击HDF文件下载 下载之后在HDF View里面预览 查看全文 http://www.lryc.cn/news/197408.html 相关文章: 【Huawei S5700交换机】产品介绍 华为Atlas 200I DK A2开发者套件--基础使用配置 C++DAY47 四边形不等式 Jmeter(四):请求默认值元件应用,正则表达式提取器元件讲解 LCR 001. 两数相除 LeCun和Bengio“吵”起来了,人工智能是“潘多拉魔盒”吗? 电子期刊制作宝典,让你成为专业行家 ESP32网络开发实例-Web显示传感器实时数据 ARM Cortex-A9:裸机开发,点亮LED3 QT学习day2 214. Devu和鲜花 【C++初阶(三)引用与内联函数】 RK3288 Android11 mini-pcie接口 4G模组EC200A适配(含自适应功能) Windows安装Jenkins 计算属性,侦听属性,方法区别及例子 Windows工业三防平板全功能NFC近距离感应一维/二维扫描 git远端协同开发、解决冲突、分支合并、gitlab使用、远程仓库回滚、为开源项目贡献代码、git工作流,git pull和git fetch,变基 ims-go项目搭建 2022最新版-李宏毅机器学习深度学习课程-P26 Recurrent Neural Network 【Qt控件之QButtonGroup】概述及使用 【开源分享】基于Html开发的房贷计算器,模仿新浪财经 ftp文件上传缓慢问题 【周末闲谈】VR新视界,“眼”见未来 CSRF和XSS是什么? 【Machine Learning】01-Supervised learning 《视觉 SLAM 十四讲》V2 第 8 讲 视觉里程计2 【如何根据图像 估计 相机运动】【光流 —> 直接法】 Unity DOTS System与SystemGroup概述 IDEA使用内置database数据库连接mysql报错:javax.net.ssl.SSLHandshakeException 从Flink的Kafka消费者看算子联合列表状态的使用
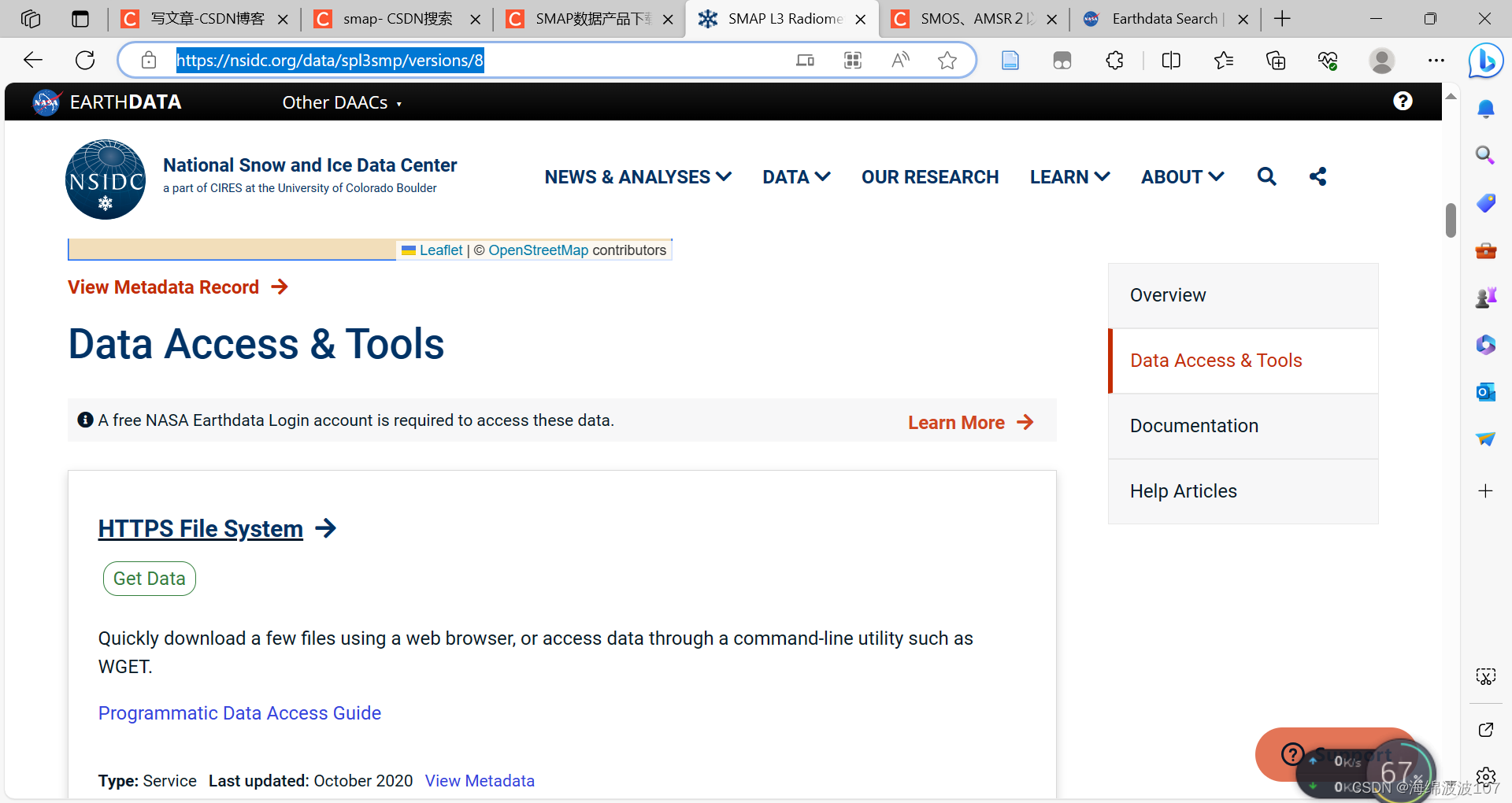
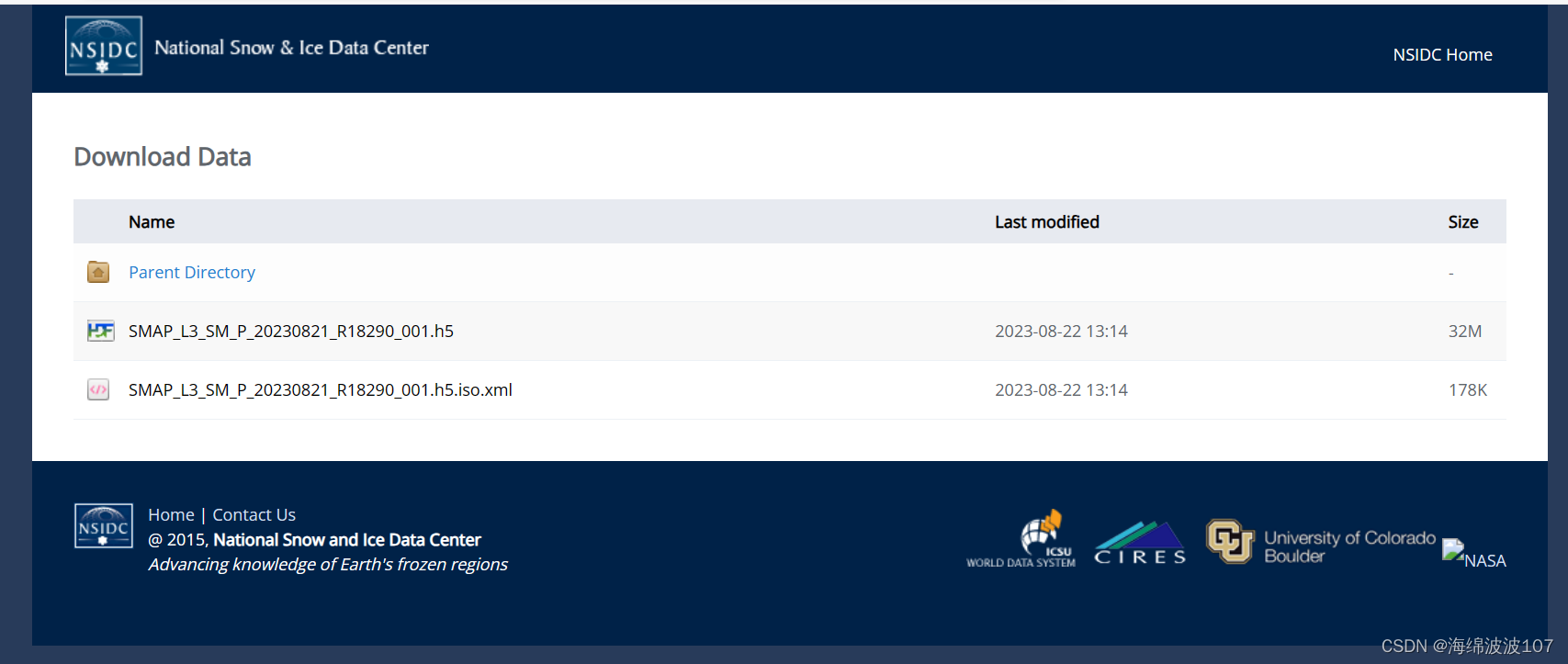
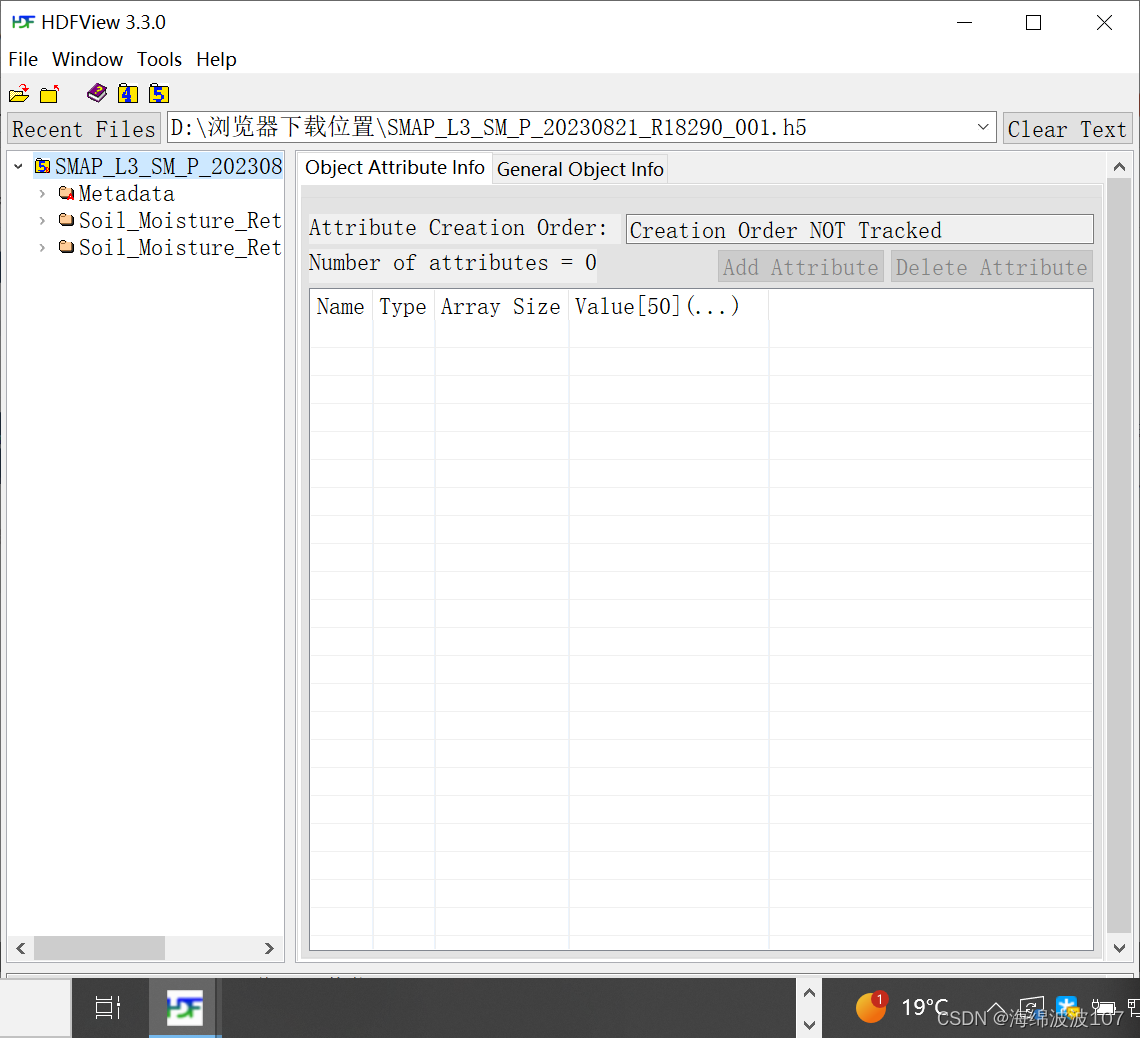
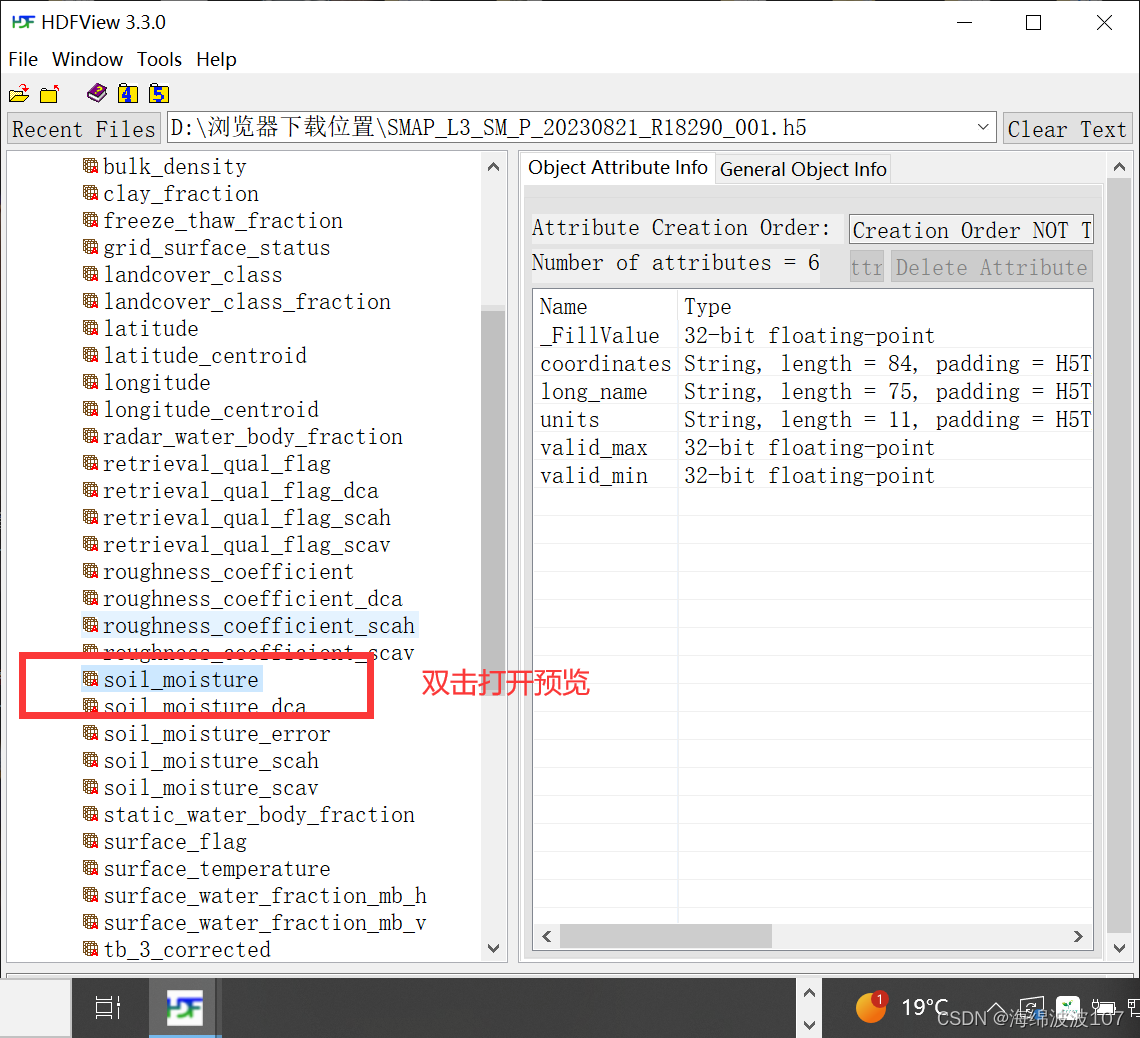
SMAP(Soil Moisture Active and Passive)数据下载 打开网站先注册登录用户 然后打开SMAP下载的网站 点击HTTPS File System进入下载页面 然后点击HDF文件下载 下载之后在HDF View里面预览 查看全文 http://www.lryc.cn/news/197408.html 相关文章: 【Huawei S5700交换机】产品介绍 华为Atlas 200I DK A2开发者套件--基础使用配置 C++DAY47 四边形不等式 Jmeter(四):请求默认值元件应用,正则表达式提取器元件讲解 LCR 001. 两数相除 LeCun和Bengio“吵”起来了,人工智能是“潘多拉魔盒”吗? 电子期刊制作宝典,让你成为专业行家 ESP32网络开发实例-Web显示传感器实时数据 ARM Cortex-A9:裸机开发,点亮LED3 QT学习day2 214. Devu和鲜花 【C++初阶(三)引用与内联函数】 RK3288 Android11 mini-pcie接口 4G模组EC200A适配(含自适应功能) Windows安装Jenkins 计算属性,侦听属性,方法区别及例子 Windows工业三防平板全功能NFC近距离感应一维/二维扫描 git远端协同开发、解决冲突、分支合并、gitlab使用、远程仓库回滚、为开源项目贡献代码、git工作流,git pull和git fetch,变基 ims-go项目搭建 2022最新版-李宏毅机器学习深度学习课程-P26 Recurrent Neural Network 【Qt控件之QButtonGroup】概述及使用 【开源分享】基于Html开发的房贷计算器,模仿新浪财经 ftp文件上传缓慢问题 【周末闲谈】VR新视界,“眼”见未来 CSRF和XSS是什么? 【Machine Learning】01-Supervised learning 《视觉 SLAM 十四讲》V2 第 8 讲 视觉里程计2 【如何根据图像 估计 相机运动】【光流 —> 直接法】 Unity DOTS System与SystemGroup概述 IDEA使用内置database数据库连接mysql报错:javax.net.ssl.SSLHandshakeException 从Flink的Kafka消费者看算子联合列表状态的使用