以单颗CMOS摄像头重构三维场景,维悟光子发布单目红外3D成像模组
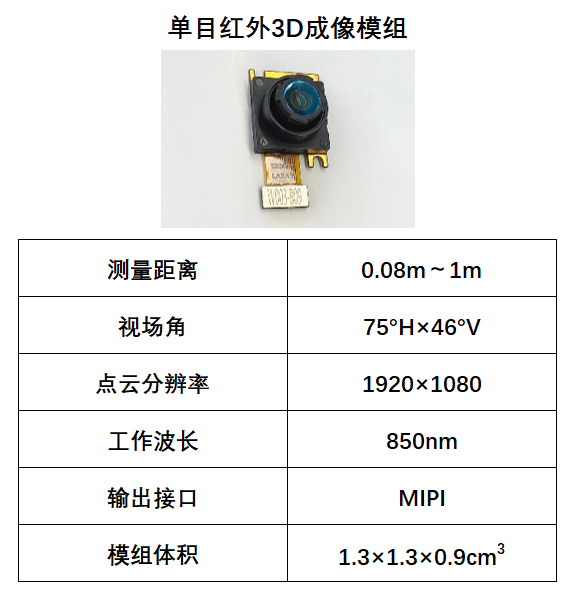
维悟光子近期发布全新单目红外3D成像模组,现可提供下游用户进行测试导入。通过结合微纳光学元件编码和人工智能算法解码,维悟光子单目红外3D成像模组采用单颗摄像头,通过单帧拍摄,可同时获取像素级配准的3D点云和红外图像信息,可被应用于机器人、生物识别等广阔领域。
市场前景与应用
3D视觉是人工智能、通用型机器人感知世界的重要窗口,是数字化、智能化产业转型升级的物质基础。目前3D视觉市场采用的方案主要包括飞行时间法(ToF)、结构光和双目相机。这三种技术路径需要借助激光器、高速高灵敏度探测器或多个相机,才能实现深度信息的获取。相对复杂的硬件系统会带来更高的器件成本、功耗、体积,也会对器件之间的标定和配准有更高的要求,在实际应用场景中存在诸多痛点。
硬件系统的轻量化和降本是3D视觉市场演进的必然趋势。维悟光子通过底层原理的创新,仅利用单目CMOS相机(最简单的成像系统)就可以获取完整的3D信息。本次发布的单目红外3D成像模组,主要面向机器人避障应用,也能适用于生物识别等需要中近距离3D成像的场景。
相比于ToF、结构光和双目相机三种传统技术路径,维悟光子单目3D相机的独特优势有:
-
更低的器件成本
维悟单目3D相机采用单个CMOS相机获取深度信息,可以节