【单片机】18-红外线遥控
一、红外遥控背景知识
1.人机界面
(1)当面操作:按键,旋转/触摸按键,触摸屏
(2)遥控操作:红外遥控,433M/2.4G无线通信【穿墙能力强】,蓝牙-WIFI-Zigbee-LoRa等无线网络
2.红外遥控相关知识
1.红外线基本知识
红外线和紫外线人眼看不到,人可以看到的红外线是其中的一部分
红外线传播不远
2.红外发射和接收
单向通信
一个发送器【供电发光,发送红外信号】对应一个接收器【光电传感器】
光【1】----》电【0】
没有反应的可能性:
1)发送和接收的频率不同
2)上层协议不同
万能遥控器:是包含多种协议
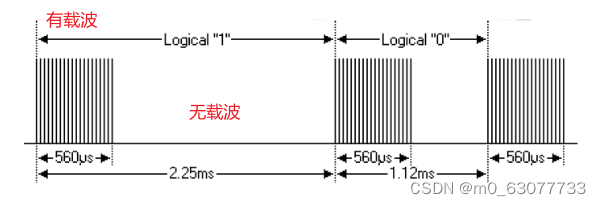
3.38KHz载波和数字信号,调制
载波:无线通信过程中,1和0无法在空气中传播,将1和0叠加在载波上
数字信号:1和0
调制:将1和0叠加在载波上
解调:将调制的数据反调制,将数据取出来
电话线上的猫:先将网络型号转换为电话线可以传播的信号然后进行传播
4.红外遥控器通信协议
遥控器和接收端的交互
二、原理图分析
1.原理图和接线
1.接收端原理图
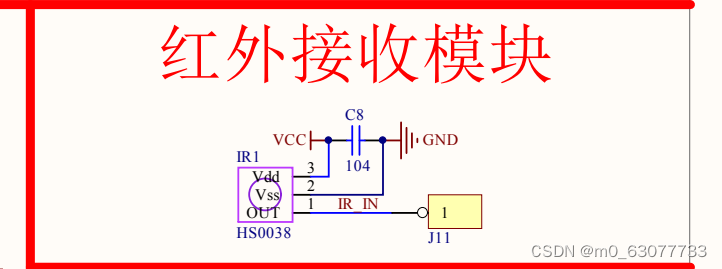

2.IR1接收模块原理
发送(调制)和接收(解调)
(1)一体集成式接收头内部已经内置了红外载波解调功能,从IRD引脚出来的就是通信的二进制信号。所以单片机的IO可以直接接IRD引脚来读取红外信号中的通信信息。所以38KHz的载波的调制和解调过程对编程是透明的(可以忽视的)
(2)红外接收头内部本身是有个相反的,意思是:平时发送方无发送信号时接收到的是1,有发送载波时接受头IRD引脚输出的是0,意味着后面时序图是相反的。

2.红外遥控器全解析
https://www.cnblogs.com/zhugeanran/p/9334289.html
1.功能演示
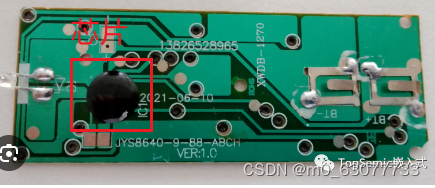
2.拆解
3.芯片bingding工艺
3.红外遥控系统工作过程综述
1.发射端
一般是一个红外遥控器,内置一个芯片,检查按键,收集键值,调制到38kHz
2.传播
通过红外头传播
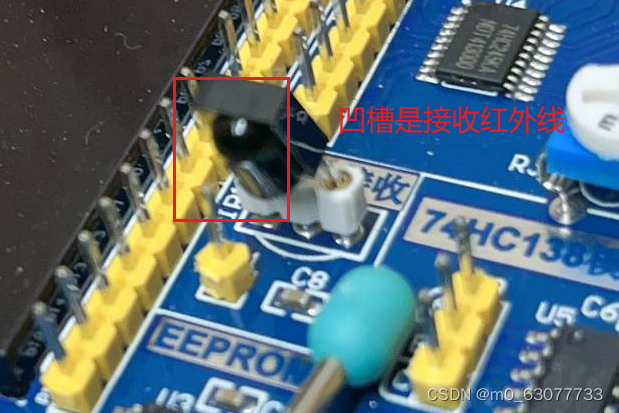
3.接收端
对载波进行解调,得到1和0的信号,解开键值
三、NEC协议讲解
1.红外遥控协议原理
因为逻辑1和逻辑0在空气中传输过程中是不稳定的
1.红外遥控协议的作用
从二进制的层面上定义了如何传输一帧数据(传输逻辑1应该多长的时间周期,传输逻辑0应该多长时间周期)
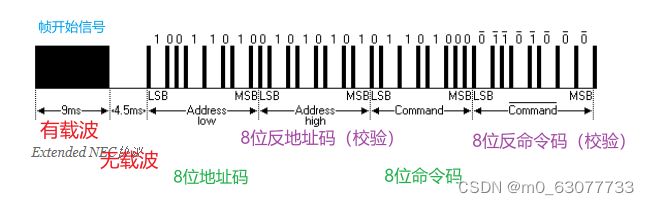
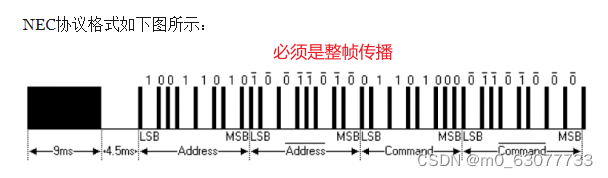
数据是一帧一帧的传,不可以出现一帧没有传输完就传输下一帧。
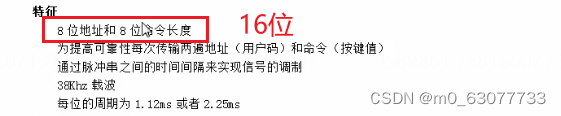
2.红外遥控的特征
- 8 位地址和 8 位命令长度
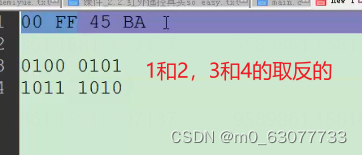
- 为提高可靠性每次传输两遍地址(用户码)和命令(按键值)
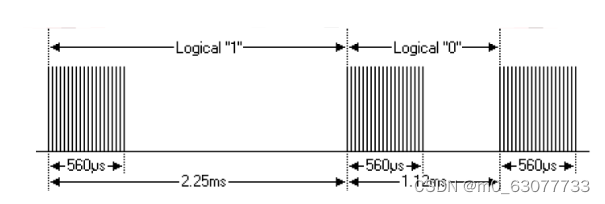
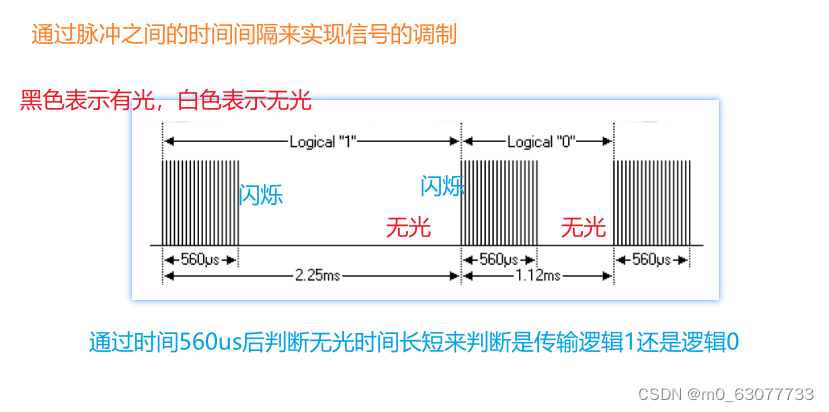
- 通过脉冲串之间的时间间隔来实现信号的调制
- 38Khz 载波
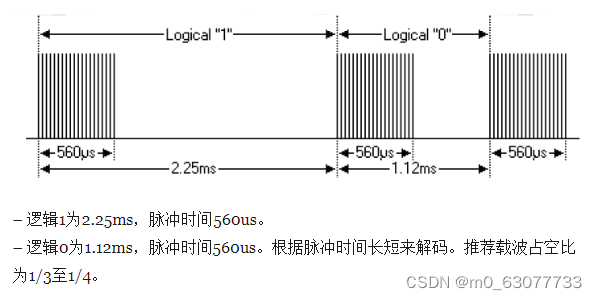
- 每位的周期为 1.12ms(逻辑0) 或者 2.25ms(逻辑1)
3.解析协议的关键点
时间周期【传输逻辑1和传输逻辑0的时间不同】
4.不同协议的差异
时序的不同,调制的方式不同,但是低层还是按照38KHz发送
5.为什么需要协议?
只需要低层协议就足够
2.NEC协议的关键点
1.载波和信号
2.关键:1和0分别如何表示
3.数据是一帧一帧的整帧传输
接收方无法预测什么时候可以接收完毕【异步:轮询或者中断】
4.NEC是串行协议
数据是一个bit一个bit的传输
5.时序中的时间仍然是关键点
四、官方示例代码
1.如何得到一段代码精确延时时间【软仿真】
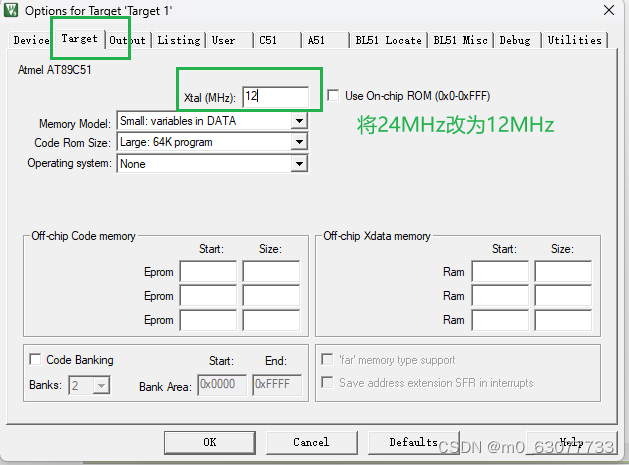
涉及到延时时间问题时,一定要先确定频率

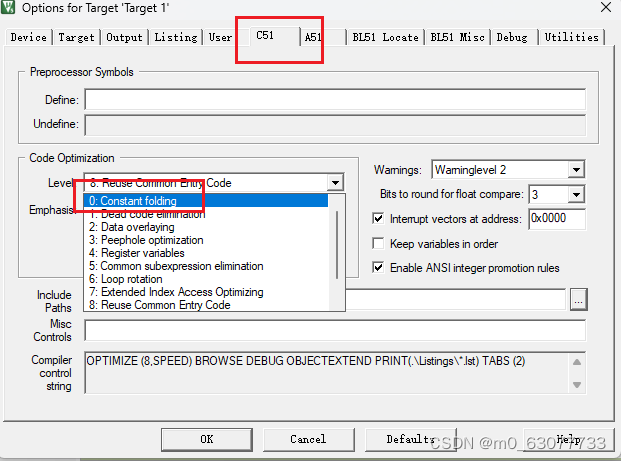
延时等级问题
注意点:每一次修改完后要记得重新运行一次
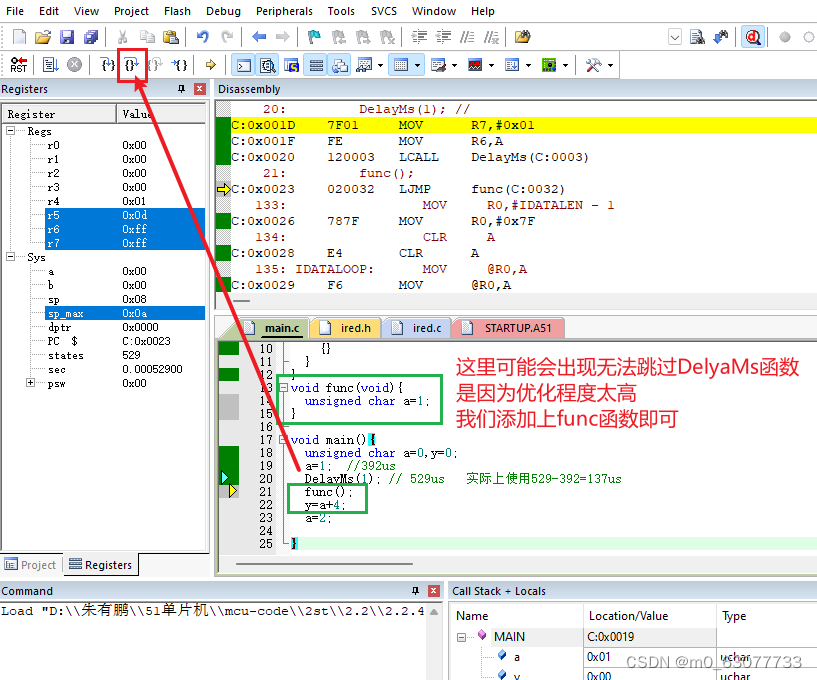
实际上耗费时间包括:
1)调用函数的时间
2)函数内部代码的执行
#include<reg51.h>
#include"ired.h"void DelayMs(unsigned int x) //0.14ms误差 0us
{unsigned char i;while(x--){for (i = 0; i<13; i++){}}
}
void func(void){unsigned char a=1;
}void main(){unsigned char a=0,y=0;a=1; //392usDelayMs(1); // 529us 实际上使用529-392=137usDelayMs(70); //8945 实际上使用8945-529=8416usfunc();y=a+4;a=2;2.中断函数
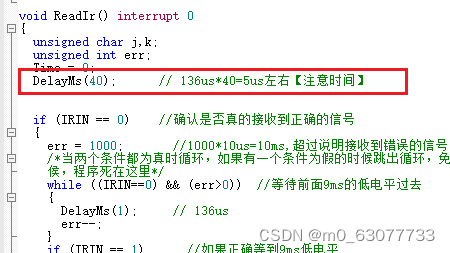
void ReadIr() interrupt 0
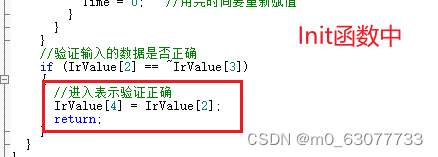
{unsigned char j,k;unsigned int err;Time = 0; DelayMs(70); // 8416us---软仿真测试//时序图中要持续9us的时间处于低电平(相反)if (IRIN == 0) //确认是否真的接收到正确的信号{ //检查是否超时 err = 1000; //1000*10us=10ms,超过说明接收到错误的信号/*当两个条件都为真时循环,如果有一个条件为假的时候跳出循环,免得程序出错的时侯,程序死在这里*/ //每过136ms去检查是否变为高电平//IRIN==0:表示此时还是低电平,此时9ms还没有到//err>0:避免死循环【超时设置】while ((IRIN==0) && (err>0)) //等待前面9ms的低电平过去 { DelayMs(1); // 136us【在8.4us后不断检查】err--;} //超过9us,进入4.5msif (IRIN == 1) //如果正确等到9ms低电平{err = 500;//超时检查while ((IRIN==1) && (err>0)) //等待4.5ms的起始高电平过去{DelayMs(1);err--;}//开始传输数据for (k=0; k<4; k++) //共有4组数据{ for (j=0; j<8; j++) //接收一组数据【从低位开始读】{err = 60;//这里是为了消耗每接受一个数据前面的560us的时间 while ((IRIN==0) && (err>0))//等待信号前面的560us低电平过去{DelayMs(1);//延时1表示延时136us【软仿真】err--;}err = 500;//开始区分逻辑1(1.69ms)和逻辑0(0.56ms)while ((IRIN==1) && (err>0)) //计算高电平的时间长度。{DelayMs(1);//0.14ms//逻辑1(1.69ms)和逻辑0(0.56ms)//1690/136=12个//560/136=4个//如果time》12则表示为逻辑1,如果time《4则表示为逻辑0Time++;//计算,看有多少个136userr--;if (Time > 30)//136*30=4080us【超时机制】//{EX0 = 1;return;}}//循环结束后,判断此时time的大小,如果IrValue[k] >>= 1; //k表示第几组数据if (Time >= 8) //如果高电平出现大于565us,那么是1{IrValue[k] |= 0x80;//将得到的数据放在高位}Time = 0; //用完时间要重新赋值 }}}if (IrValue[2] == ~IrValue[3])//判断两个命令(键值)是否相同---》检验{return;}}
}五、代码的移植
1.全局变量的定义
全局变量在哪个C文件中用就在哪个C文件中定义
不能放在头文件中定义
如果在多个C文件中都要用到同一个全局变量,应该在一个主要的C文件中定义
然后其他C文件中extern声明即可
ired.c
// 全局变量在哪个C文件中用就在哪个C文件中定义
// 不能放在头文件中定义
// 如果在多个C文件中都要用到同一个全局变量,应该在一个主要的C文件中定义
// 然后其他C文件中extern声明即可
sbit IRIN = P3^2;
unsigned char IrValue[5]; // IrValue的0-3用来放原始数据,4用来放经过校验确认无误的键值
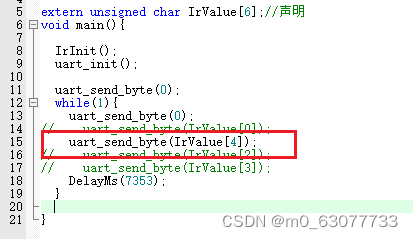
unsigned char Time;main.c
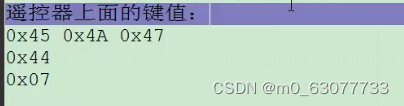
extern unsigned char IrValue[6];//声明2.红外遥控器上的键值
1.测试
2.结果
3.延时时间配合
结合上面的“如何得到一段代码精确延时时间【软仿真】”去验证一个延迟时间函数对应多长时间,然后要求这个地方不超过9ms即可。
4.屏蔽无效数据
将经过校验确认无误的键值输出
5.程序改良
原来我们将主程序写在中断中,实际上不能写在里面。
所以我们可以通过定时器来处理延时,因为在定时器在运行时,CPU还可以工作。