当前位置: 首页 > news >正文 px4仿真实现无人机自主飞行 news 2025/6/27 15:53:40 一,确定消息类型 无人机通过即在电脑是现自主飞行:思路如下。 通过Mavros功能包,将ROS消息转换为Mavlink消息。实现对无人机的控制。 几种消息之间的关系如下: 对于ROS数据,就是我们机载电脑执行ROS系统的数据。 对于Mavros消息,就是Mavros功能包内部的消息。查询网站 对于mavlink消息,就是无人机与外部通信的消息(格式)MavLink消息 对于uorb消息,就是无人机内部传感器之间的消息类型。uorb消息 确定话题功能 我么这里以下面这个Mavros消息为例 查看全文 http://www.lryc.cn/news/185426.html 相关文章: 详解Linux的系统调用fork()函数 构建捡垃圾机器人的 ROS 2 项目 Spring常用注解(2) upload-labs靶场通关 git拉取代码过程 Swift | 属性包装器 Android改造CardView为圆形View,Kotlin Idea下面git的使用:变基、合并、优选、还原提交、重置、回滚、补丁 【数据结构】什么是算法 复旦大学EMBA:揭秘科创企业,领略未来战略! 根据您的数据量定制的ChatGPT,改变客户服务的方式 《Unity Shader 入门精要》笔记03 LINUX系统使用软件异地同步数据(灾备) IDEA Rogstry中找不到compiler.automake.allow.when.app.running问题解决 c#设计模式-行为型模式 之 状态模式 使用Docker安装JupyterHub SpringCloudGateway网关整合swagger3+Knife4j3,basePath丢失请求404问题 html通过使用图像源的协议(protocol)相对 URL 来防止安全/不安全错误 【SpringBoot】| Thymeleaf 模板引擎 Vue Router的进阶 方案:快递站智能视频监控3大亮点汇总 Direct3D网格 docker安装wiki bigemap在林业勘测规划设计行业的一些应用 设计模式学习 Openfire身份认证绕过漏洞 类目体系设计总结 gRPC之proto数据验证 计算机竞赛 题目: 基于深度学习的疲劳驾驶检测 深度学习 css--踩坑
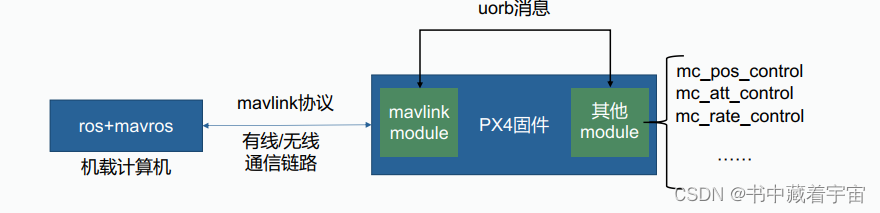
一,确定消息类型 无人机通过即在电脑是现自主飞行:思路如下。 通过Mavros功能包,将ROS消息转换为Mavlink消息。实现对无人机的控制。 几种消息之间的关系如下: 对于ROS数据,就是我们机载电脑执行ROS系统的数据。 对于Mavros消息,就是Mavros功能包内部的消息。查询网站 对于mavlink消息,就是无人机与外部通信的消息(格式)MavLink消息 对于uorb消息,就是无人机内部传感器之间的消息类型。uorb消息 确定话题功能 我么这里以下面这个Mavros消息为例 查看全文 http://www.lryc.cn/news/185426.html 相关文章: 详解Linux的系统调用fork()函数 构建捡垃圾机器人的 ROS 2 项目 Spring常用注解(2) upload-labs靶场通关 git拉取代码过程 Swift | 属性包装器 Android改造CardView为圆形View,Kotlin Idea下面git的使用:变基、合并、优选、还原提交、重置、回滚、补丁 【数据结构】什么是算法 复旦大学EMBA:揭秘科创企业,领略未来战略! 根据您的数据量定制的ChatGPT,改变客户服务的方式 《Unity Shader 入门精要》笔记03 LINUX系统使用软件异地同步数据(灾备) IDEA Rogstry中找不到compiler.automake.allow.when.app.running问题解决 c#设计模式-行为型模式 之 状态模式 使用Docker安装JupyterHub SpringCloudGateway网关整合swagger3+Knife4j3,basePath丢失请求404问题 html通过使用图像源的协议(protocol)相对 URL 来防止安全/不安全错误 【SpringBoot】| Thymeleaf 模板引擎 Vue Router的进阶 方案:快递站智能视频监控3大亮点汇总 Direct3D网格 docker安装wiki bigemap在林业勘测规划设计行业的一些应用 设计模式学习 Openfire身份认证绕过漏洞 类目体系设计总结 gRPC之proto数据验证 计算机竞赛 题目: 基于深度学习的疲劳驾驶检测 深度学习 css--踩坑