【深蓝学院】手写VIO第2章--IMU传感器--作业
这次作业坑很多,作业说明的不清楚,摸索了很长时间才将此次作业完成,在这里进行记录。
1. T1
1.1 题干
1.2 解答
1.2.1 法1,ros related方法
不知道为什么我的launch不了,在imu_utils目录下面建立build后,cmake,make install之后出现了imu_an的可执行文件(经常会出现找不到已经生成的文件,需要重新打开一个terminal再来看行不行)
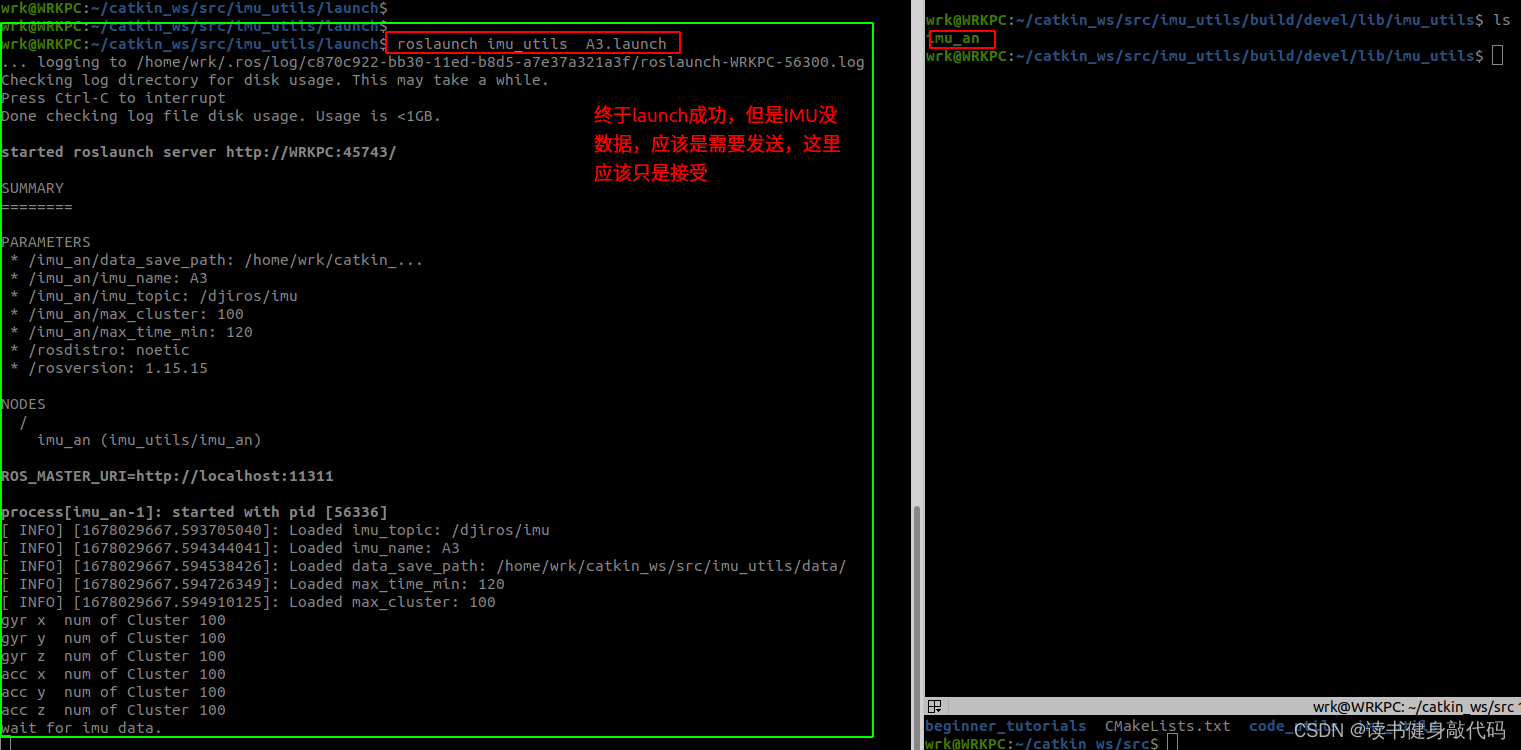
在下面也证实了这个imu_an是subscribe了一个topic,
得看这个topic在哪里发送(或者说这仅仅只是一个接受数据的东西,数据需要我们自己去采集,自己去发送对应的topic,需要继续了解rosplay是干什么用的)

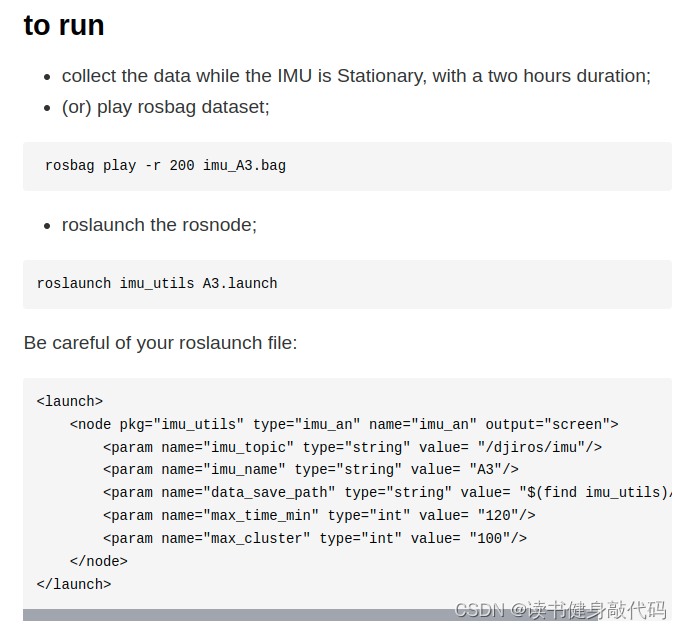
所以按照imu_utils的markdown说明的,就是把roslaunch起来,subscribe对应的topic,然后使用 rosbag play发送或者实际的采集数据(采集数据肯定要发送topic),所以就跑成了,跑完之后就完成了IMU的Acc和Gyro的高斯白噪声和bias协方差的标定,结果见下图(以imu_a3.bag为例):
Gyro标定结果:
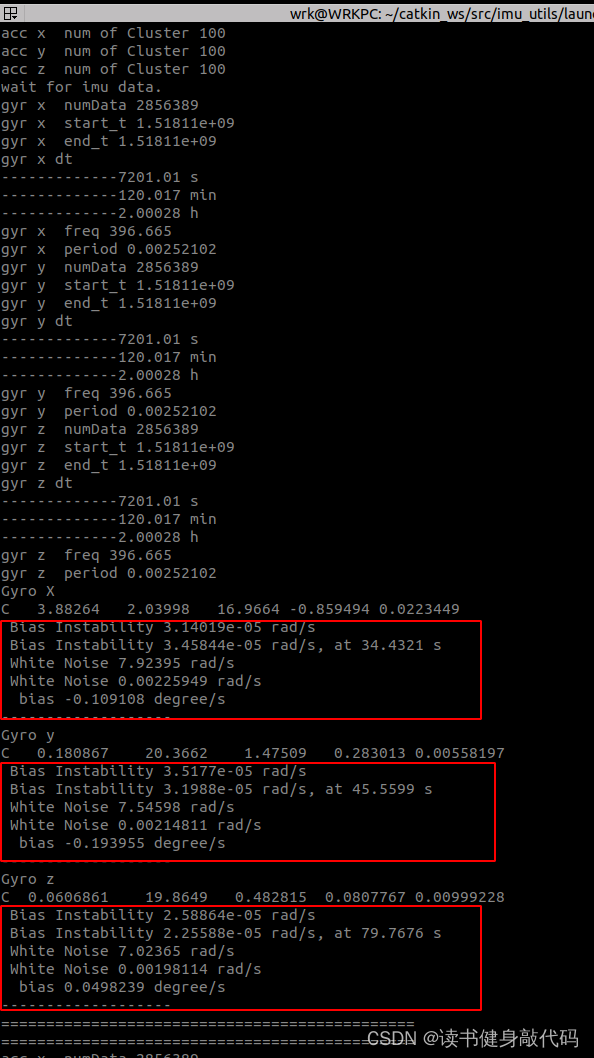
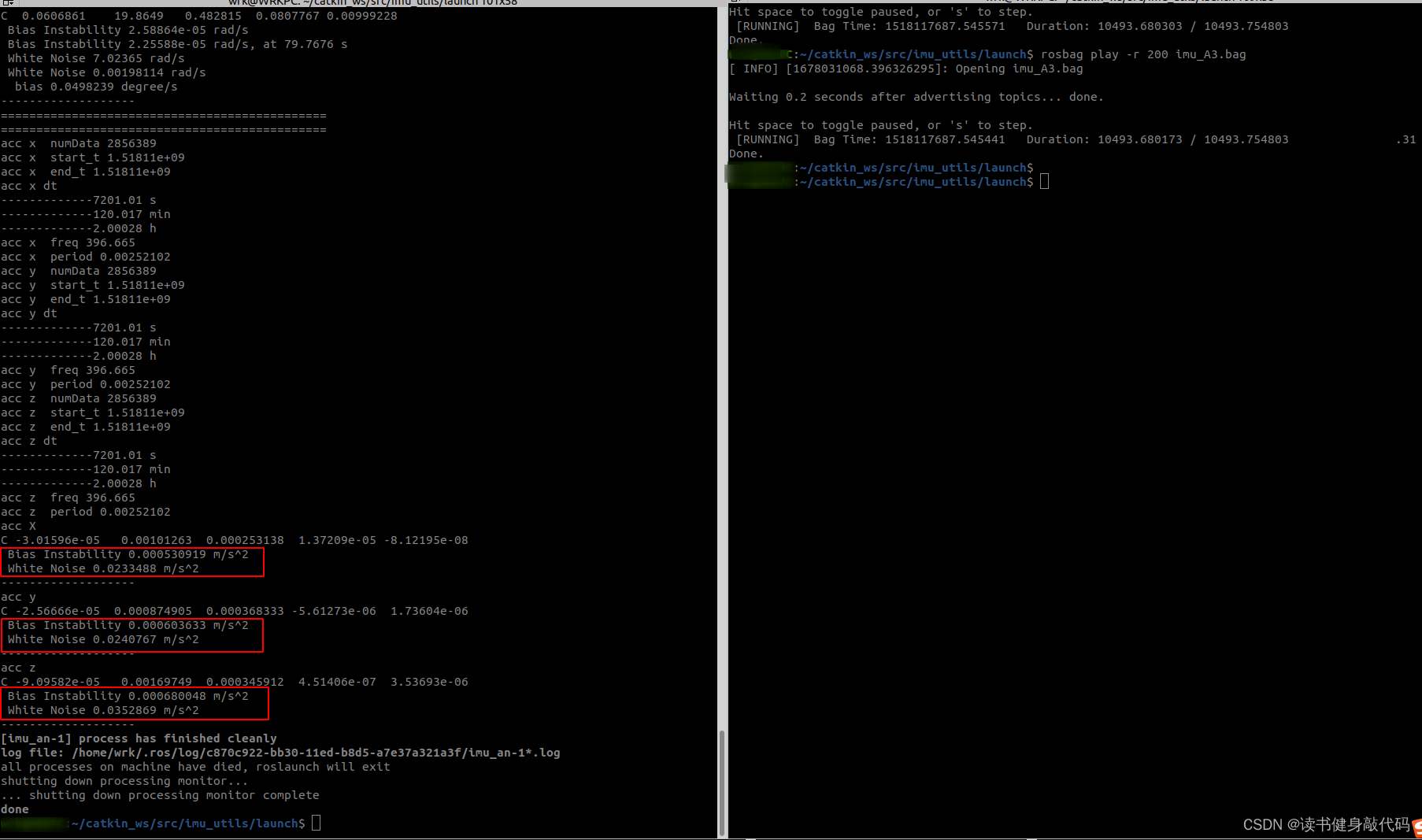
Acc标定结果:
1.2.1 法2,kalibr_allan工具法
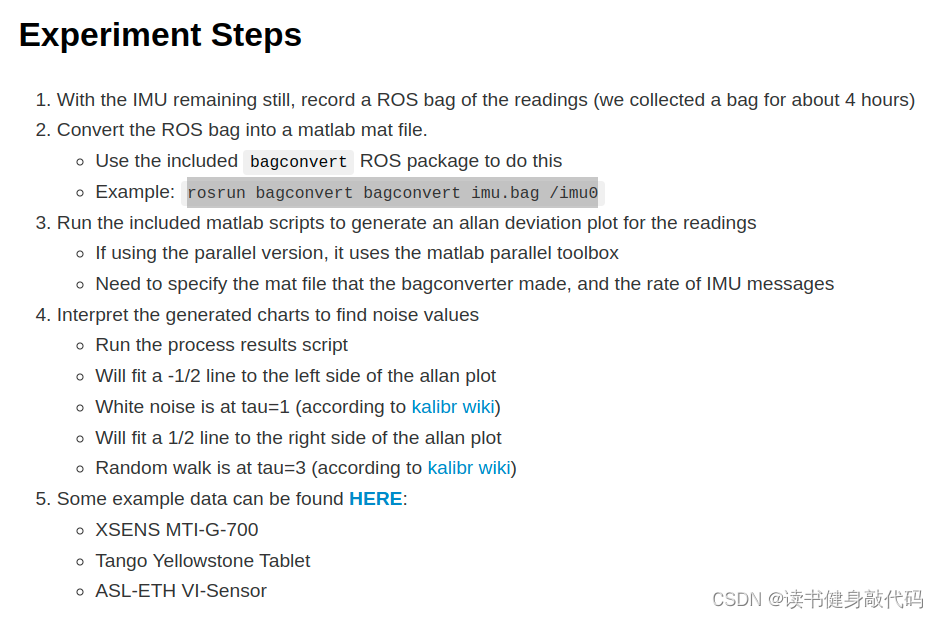
作业中没有对使用kalibr_allan的整个流程进行介绍,这里进行梳理:
- 使用IMU仿真程序生成imu.bag数据(编译vio_data_simulation工程并运行生成)
- 使用bagconvert ros package将生成的imu.bag数据转换成.mat文件用于kalibr_allan使用
- 在matlab下使用kalibr_allan中的matlab程序和转换成的.mat文件进行IMU的标定。
1. vio_data_simulation
mkdir vio_sim_ws/src
cd src
git clone https://github.com/HeYijia/vio_data_simulation
git checkout ros_version
catkin_make
由于我catkin_make有一些问题,这里也可以直接使用cmake的方法进行编译,编译完之后生成文件在devel/lib/vio_data_simulation下会生成node的可执行文件

直接执行之后就会生成imu的仿真数据:

以上数据用于第三步的kalibr_allan标定使用。
下面的数据用于可视化使用:
关于仿真数据的可视化,是编译cmake编译这个工程生成可执行文件data_gen,执行这个可执行文件就生成各种.txt文件,下面的可视化就是基于生成的.txt文件进行的。
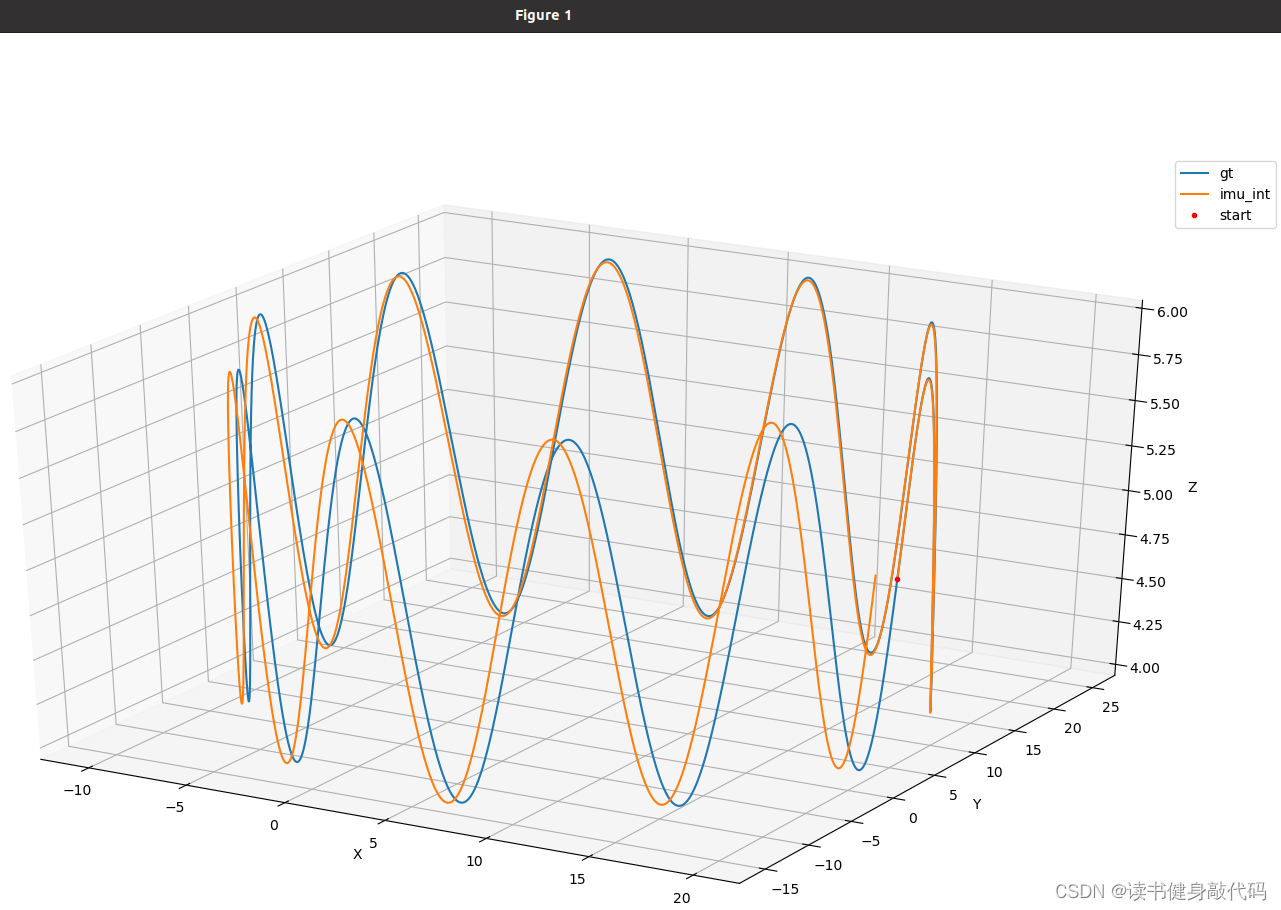
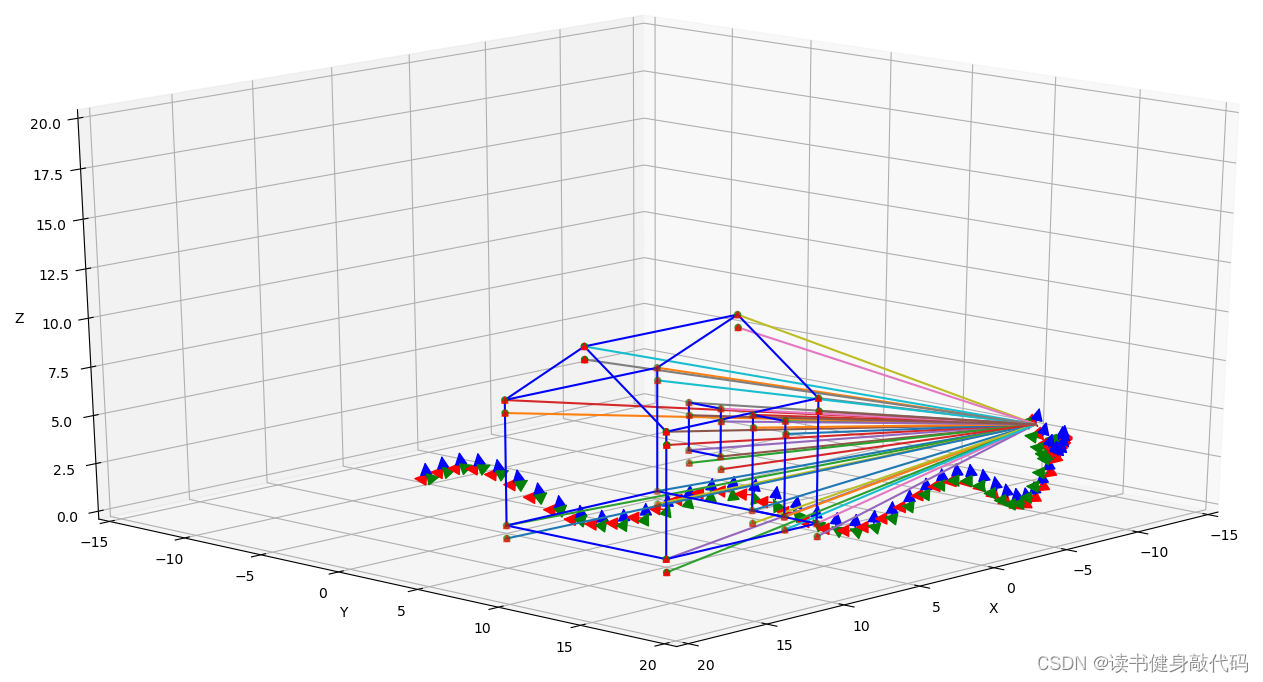
其中的数据仿真可视化可以用python_tool下的python脚本进行实现,都是基于matplotlib.pyplot实现的(话说好久没有碰python了),效果如下:
draw_trajectory.py(这个在第二题在更改积分方式的时候还会再使用)
draw_points.py:是一个动态的
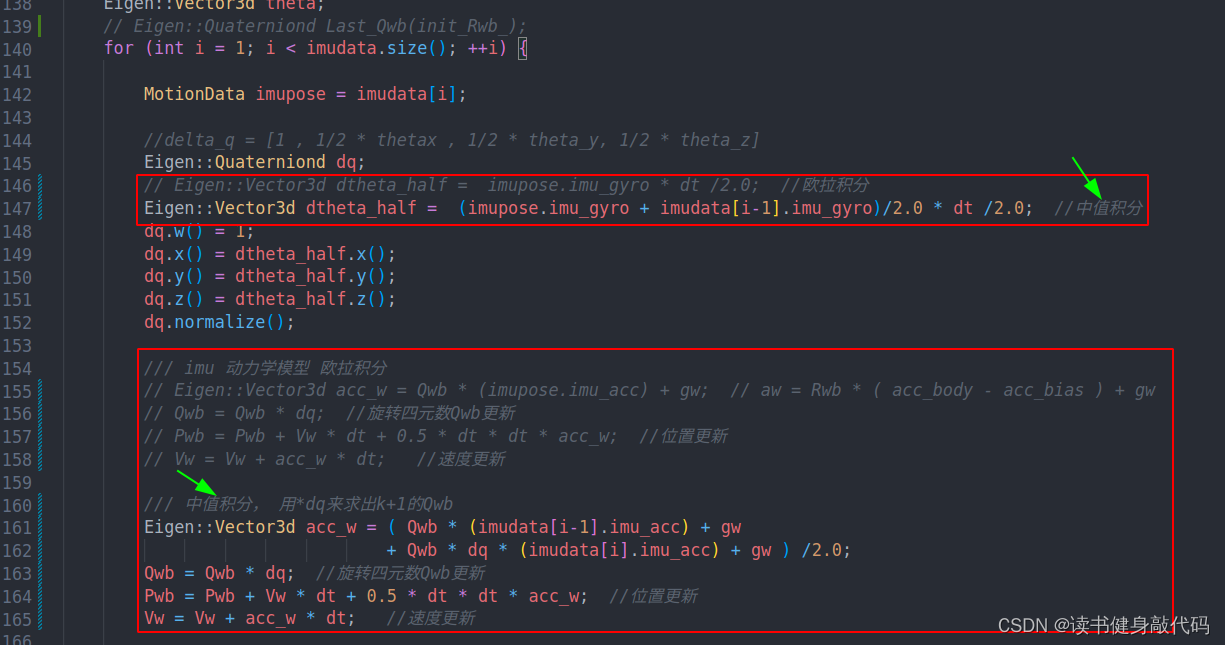
中值积分:
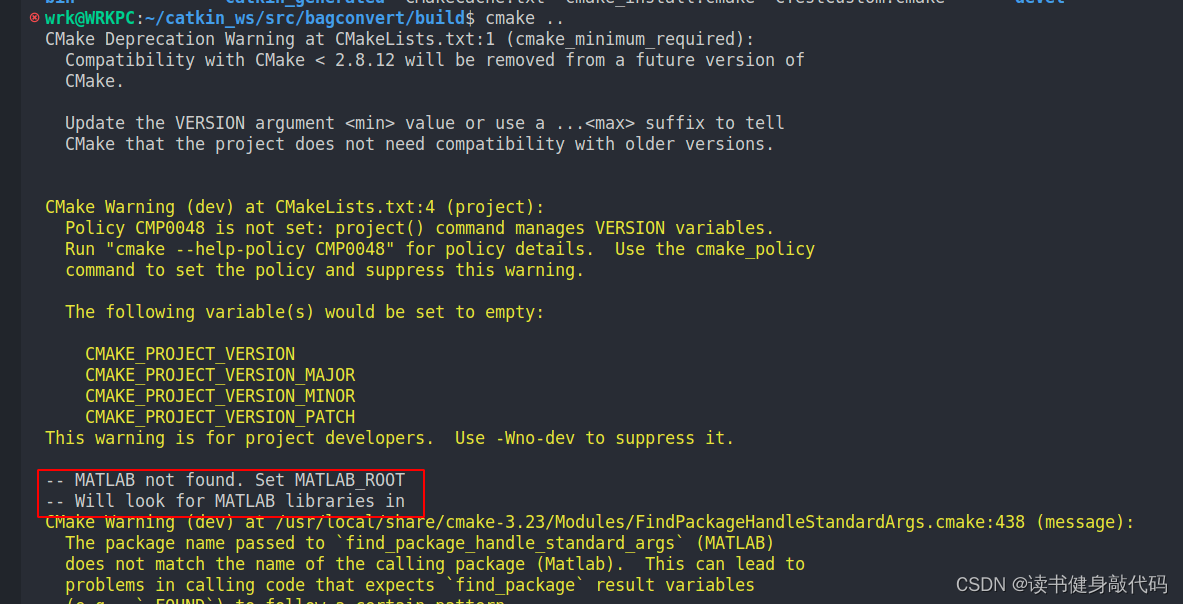
2. bagconvert
bagconvert同理也这样编译:

catkin_make有问题的话可以直接如下所示的将IMU数据转换成.mat文件
./bagconvert img.bag imu0

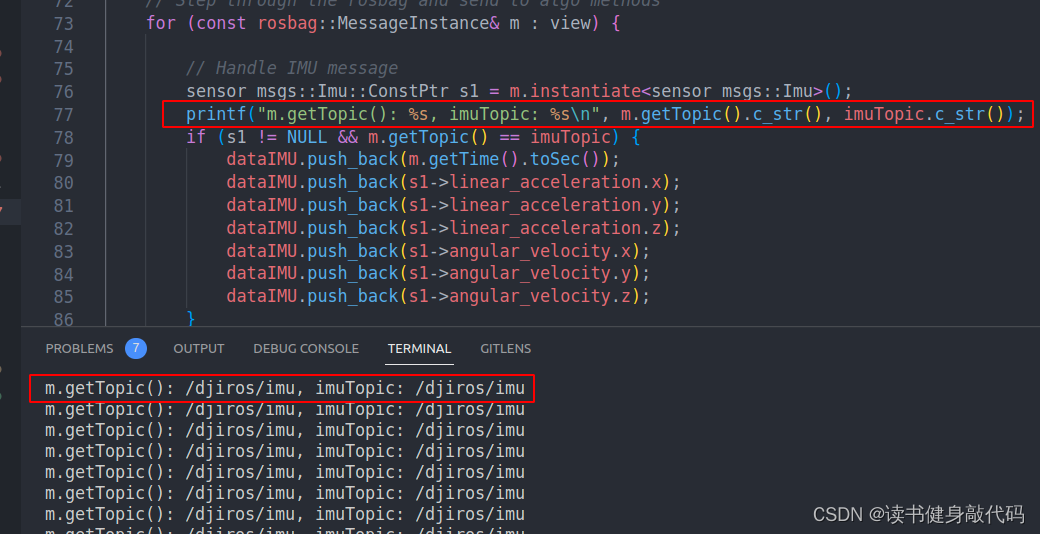
这个坑很大,md中没有说明白后面跟的参数的意义,看了代码才发现
说的后面跟三个参数:包名,bag名,bag中的topic名。
(第三个参数我开始以为是结果mat名字,搞了好久convert出来的mat都是177byte空的,matlab上跑SCRIPT当然跑不过,后来看了bagconvert的代码才发现三个参数的意义,对于不熟悉ros的同学来说真的很坑)

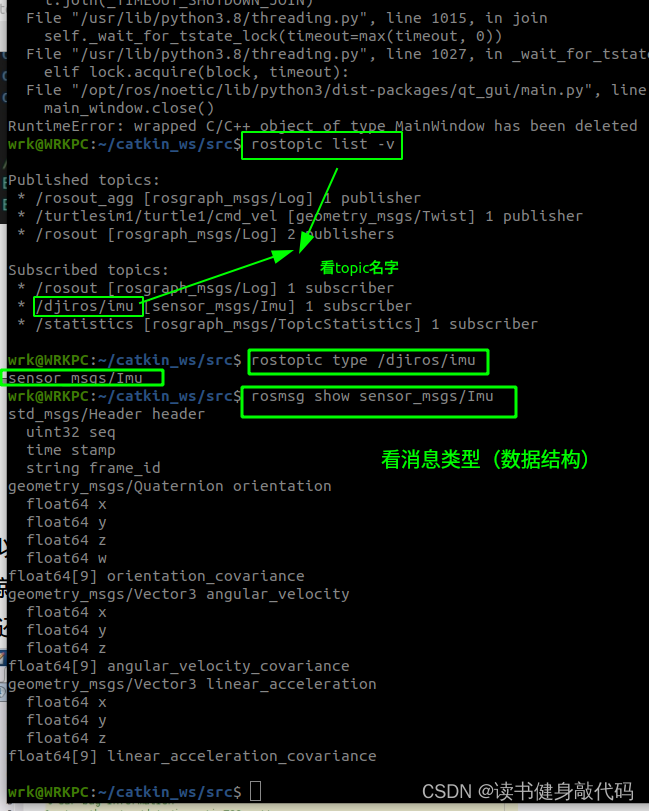
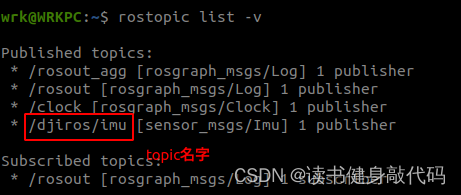
如果想简单地知道你的bag中的tpoic,可以直接打印出来
也可以像上面的rosrelated方法一样,把bag包play起来,然后查看此时的topic名字
rosbag play -r 200 imu_A3.bag
rostopic list -v
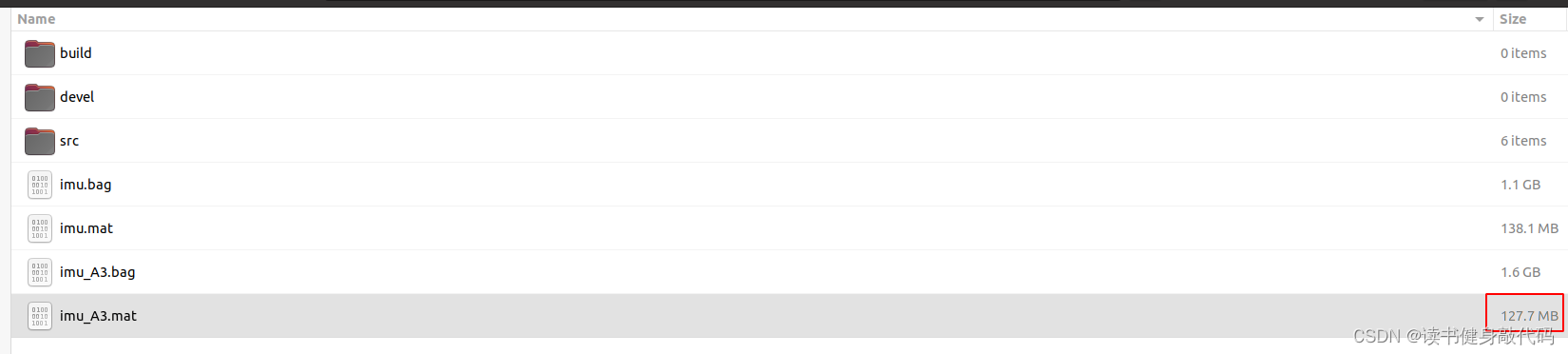
参数传递正确就能顺利的convert成mat文件了,大小也是正常的
rosrun bagconvert bagconvert ./imu_A3.bag /djiros/imu
3. kalibr_allan
首先看kalibr_all的md
需要安装Matlab,遂龟速安装中…
参考博客:Ubuntu20.04安装Matlab2021b
但是cmake不过,没有找到matlab中的mat.h,博客中说发现需要更改Findmatlab.cmake
修改~/catkin_ws/src/kalibr_allan-master/bagconvert/cmake目录下的FindMatlab.cmake,
找到 find_program(MATLAB_EXE_PATH matlab 这一行,将他修改成刚刚安装matlab的路径的bin路径find_program(MATLAB_EXE_PATH matlabPATHS /usr/local/MATLAB/R2021b/bin)
这样可以找到matlab
即可cmake通过。
后面发现没有安装parallel_compute(类似这个名称)的tool_box,查了一下,非正版的可以再用刚才的安装包重新安装,在安装界面可以选择需要安装的tool_box。
但是,我的电脑内存快爆了,matlab跑不出来,第一题就看看吧。知道有这个方法(折腾这么久,还是有点亏)
2. T2

欧拉积分:
中值积分重合效果很好:
代码改动部分:
可视化仿真:

3. T3
3.1 题干
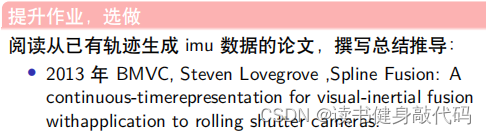
将B Spline用代码实现,与上面的中值积分的效果进行对比。
3.2 解答
该部分还没做,后面会做。