基于FPGA的I2C读写EEPROM
文章目录
- 前言
- 一、I2C协议
- 1.1 I2C协议简介
- 1.2 物理层
- 1.3 协议层
- 二、EEPROM
- 2.1 型号及硬件规格
- 2.2 各种读写时序
- 三、状态机设计
- 四、项目源码:
- 五、实现效果
- 参考资料
前言
本次项目所用开发板FPGA芯片型号为:EP4CE6F17C8 EEPROM芯片型号为:24LC04B UART串口设置为:波特率115200
无校验位本次项目仅实现了EEPROM的单字节读写。若要实现连续读写可以在下文的EEPROM控制模块设置计数器控制读写字数。
一、I2C协议
1.1 I2C协议简介
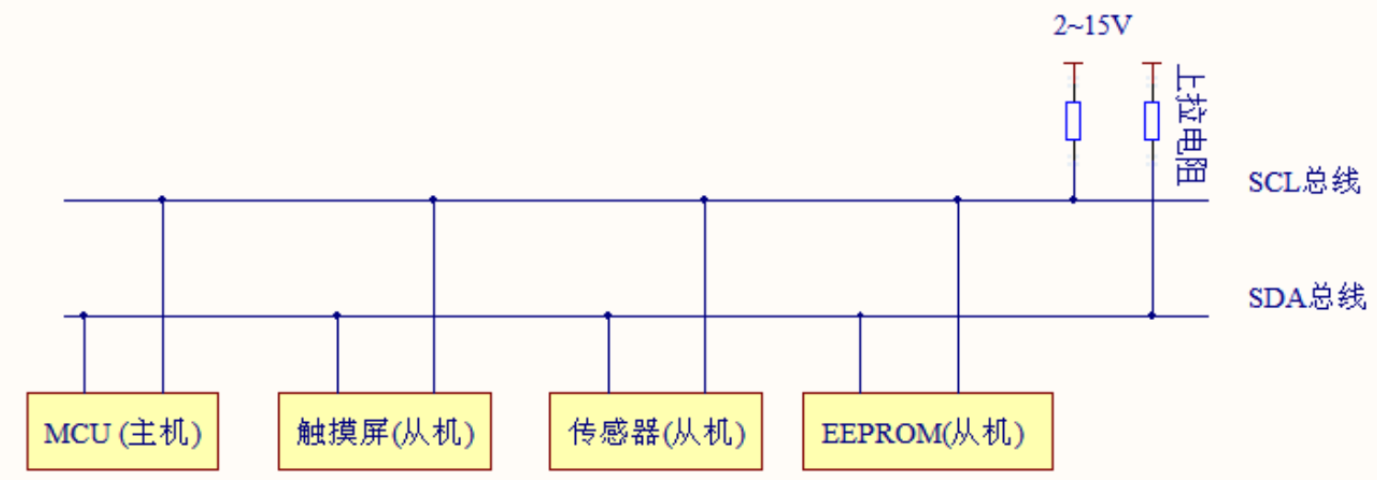
I2C总线是Philips公司在八十年代初推出的一种同步、串行、半双工 的总线,主要用于近距离、低速的芯片之间的通信;I2C总线有两根双向的信号线,一根数据线SDA用于收发数据,一根时钟线SCL用于通信双方时钟的同步;I2C总线硬件结构简单,简化了PCB布线,降低了系统成本,提高了系统可靠性,因此在各个领域得到了广泛应用。
I2C是一种多主机多从机总线,通过呼叫应答的方式实现主机与从机间的通信。每一个I2C设备都有一个唯一的7位地址,也就是说同一根线上最多挂载127个I2C从机设备(主机自己占一个地址)。主机有权发起和结束一次通信,从机只能被动呼叫;当总线上有多个主机同时启用总线时,I2C也具备冲突检测和仲裁的功能来防止错误产生。
1.2 物理层
-
I2C支持多主机多从机
-
I2C有两条线,一条SCL串行时钟线,用于数据收发同步;一条SDA串行数据线,用来表示数据
-
每个连接到IIC总线的设备都有一个唯一的地址(ID),主机可以通过地址与不同的从机建立连接
-
I2C 总线通过上拉电阻接到电源。当 IIC 设备空闲时,设备会输出高阻态,当所有设备都空闲,都输出高阻态时,由上拉电阻把 IIC总线拉成高电平。
-
I2C总线有仲裁机制:当多个主机同时发起传输时,触发仲裁机制,最终只给一个主机授权。
-
具有三种传输模式,每种传输模式对应的传输速率不同,具体速率如下:
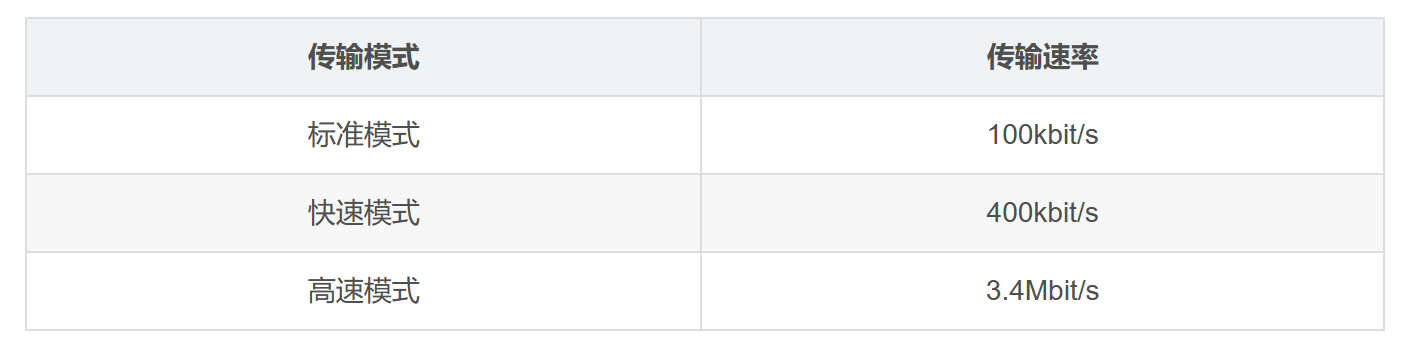
有些I2C变种还包含了快速+(1Mbit/s)和超高速(5Mbit/s 单向传输)模式。
1.3 协议层
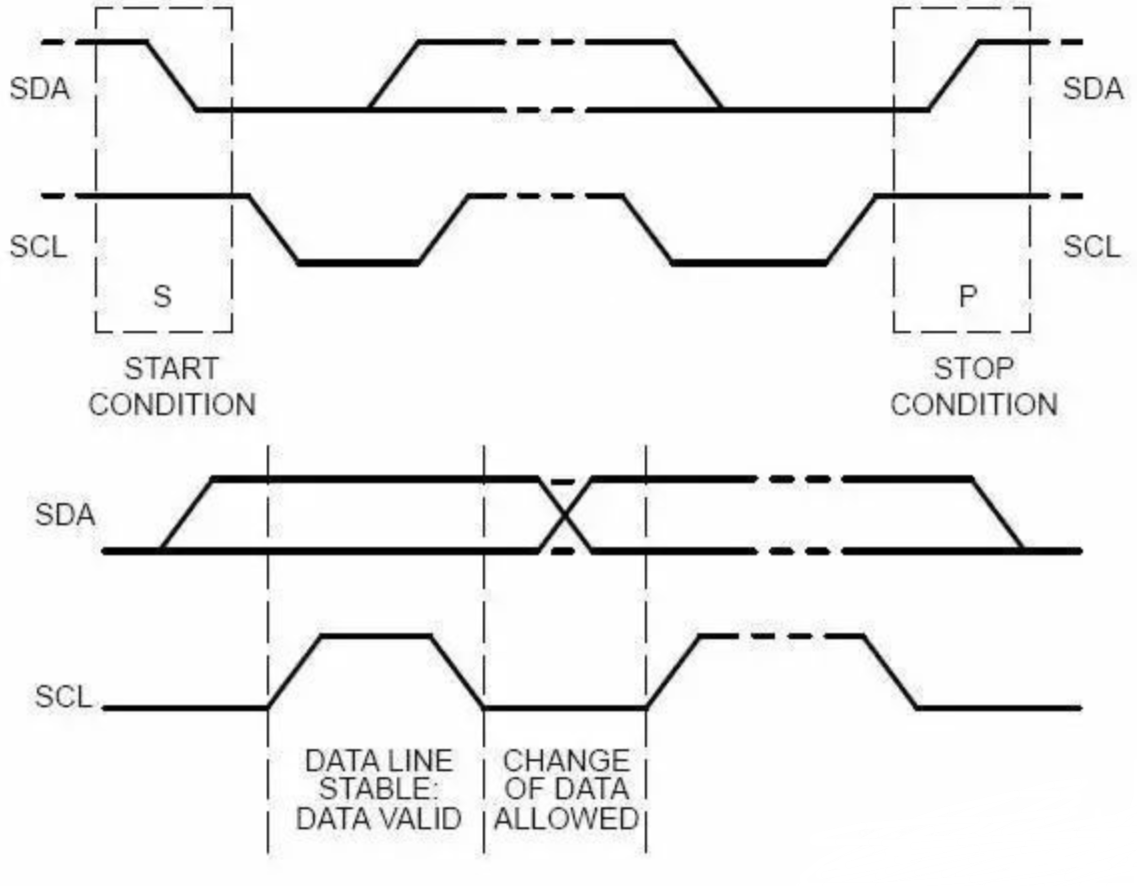
- 空闲状态:I2C协议规定,在空闲状态下SDA数据线和SCL时钟线均处于高电平。
- 开始位:当SCL处于高电平时,SDA数据线被拉低,则认为检测到起始位,一次数据传输开始。
- 数据传输:同时,协议规定在SCL高电平时期SDA数据线必须保持稳定,在SCL低电平时,SDA才允许发生改变。主机进行数据读写时,I2C协议规定,数据传输时先发送寻址字节,即7位从机地址+0/1。其中0表示主机写,1表示主机读。寻址字节发送完成后才是数据字节
- 应答位:I2C协议规定,主机每次向从机传输1字节数据后,需要接收一次从机的应答信号。0为接收成功;1为接受失败,没有响应。
- 停止位:当SCL为高电平时,数据线SDA拉高,则认为检测到停止位,一次数据传输结束。

二、EEPROM
2.1 型号及硬件规格
EEPROM的全称是“电可擦除可编程只读存储器”,即Electrically Erasable Programmable Read-Only Memory。本次项目中使用的EEPROM型号为24LC04B。
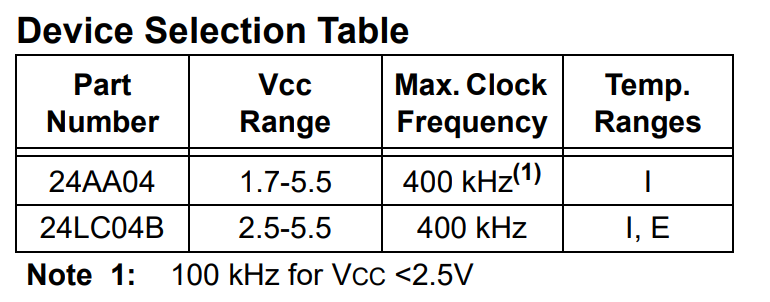
由手册可以看出,24LC04B支持的最大时钟频率为400KHz。
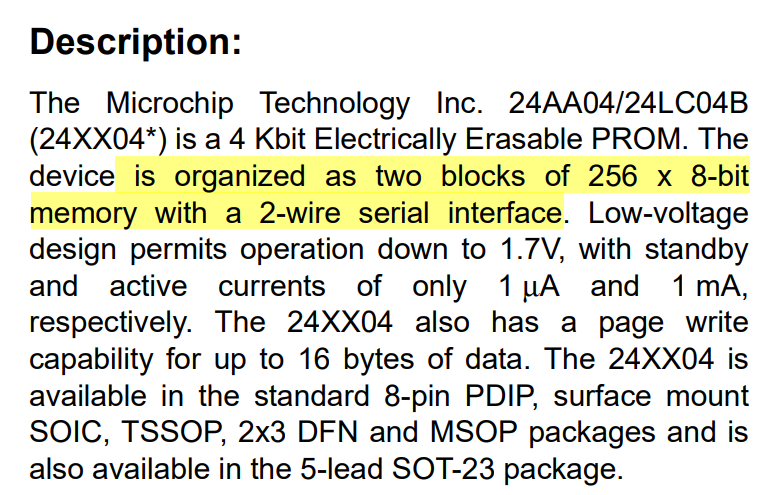
由手册得出该型号EEPROM共有两个Block 每个Block的存储容量为256×8bit。
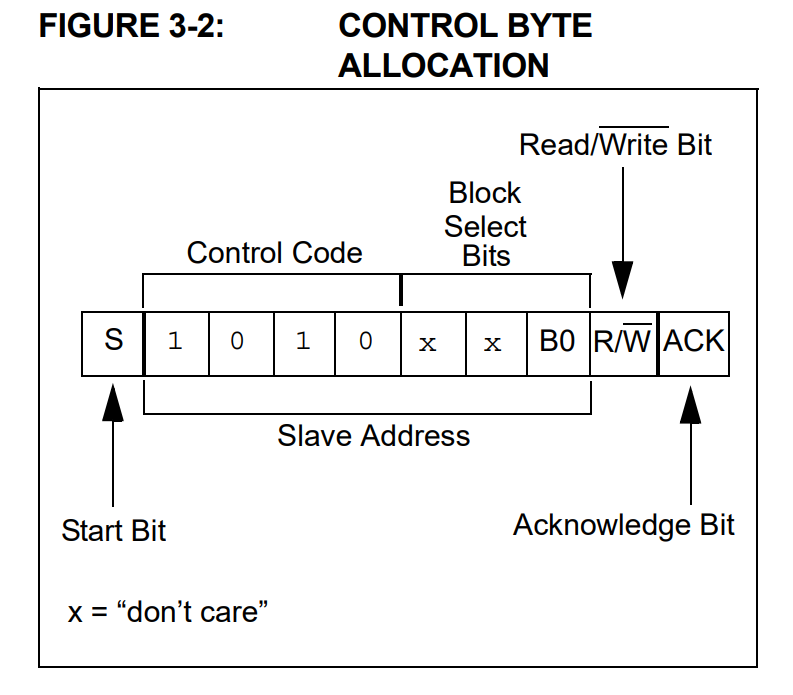
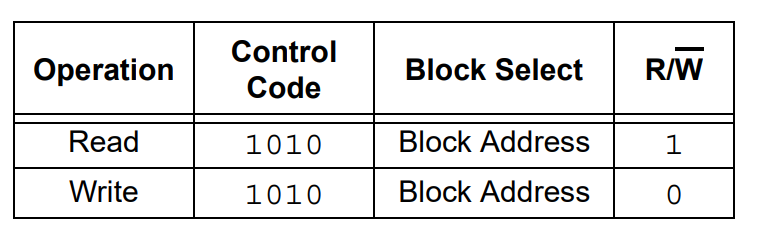
由手册得出,设备地址为1010xxB0共七位(xx为dont care B0为块选择),1为读操作,0为写操作。
2.2 各种读写时序
单字节写
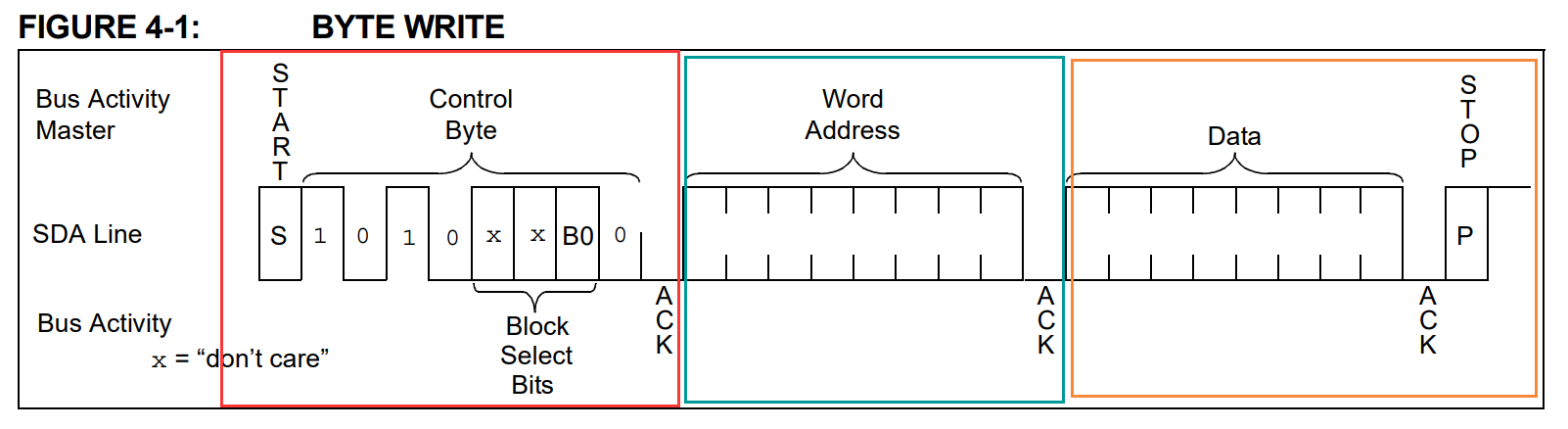
- 先写开始位
- 然后写控制字节,从机接收到发应答信号
- 然后写数据地址,从机接收到发应答信号,如果数据地址是2位的话,就继续写数据地址,从机接收到发应答信号
- 然后写数据,从机接收到发应答信号
- 最后写结束位
页写
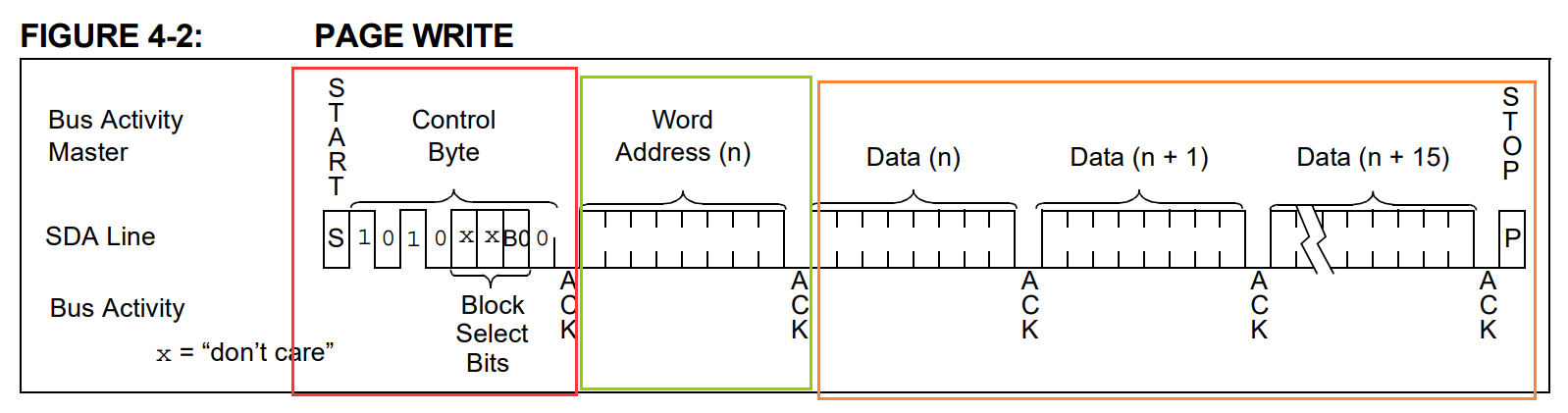
- 页节写先开始位
- 然后写控制字节,从机接收到应答信号
- 然后写数据地址,从机接收到应答信号,如果数据地址是2位的话,就继续写数据地址,从机接收到应答信号
- 然后写数据,从机接收到应答信号
- 然后继续写数据,直到写完全部的数据
- 最后是结束位
当前地址读
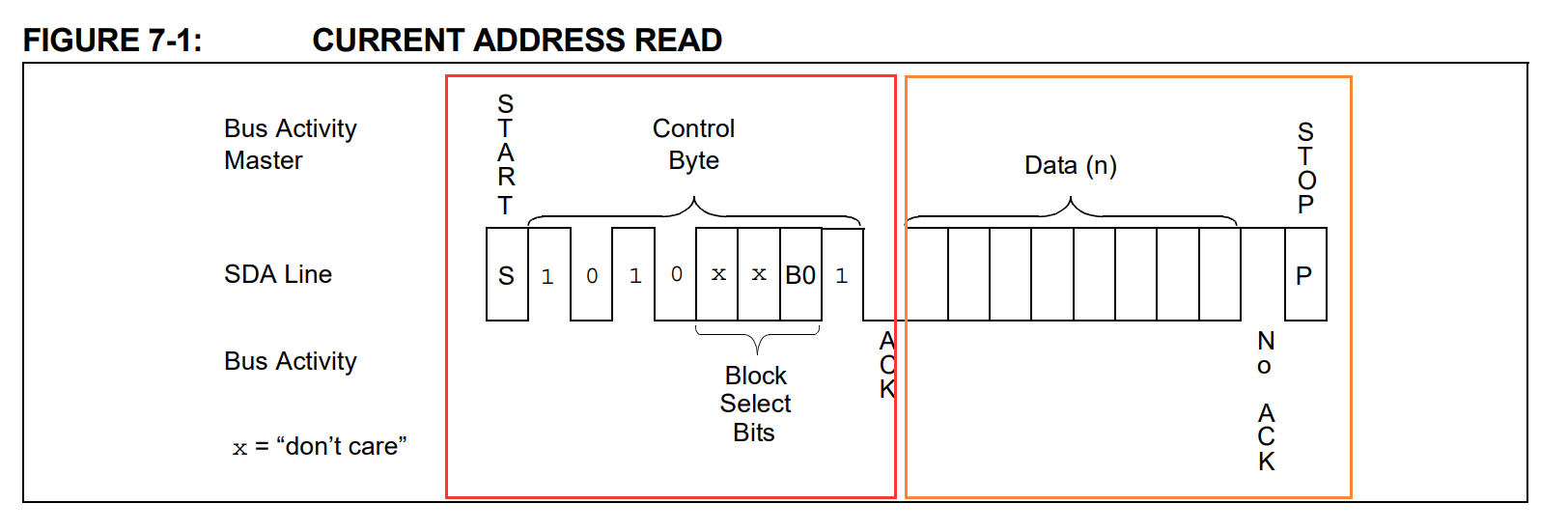
- 当前地址读先开始位
- 然后写控制字节,从机接收到应答信号,然后读数据,无应答信号
- 最后结束位
随机地址读和顺序读
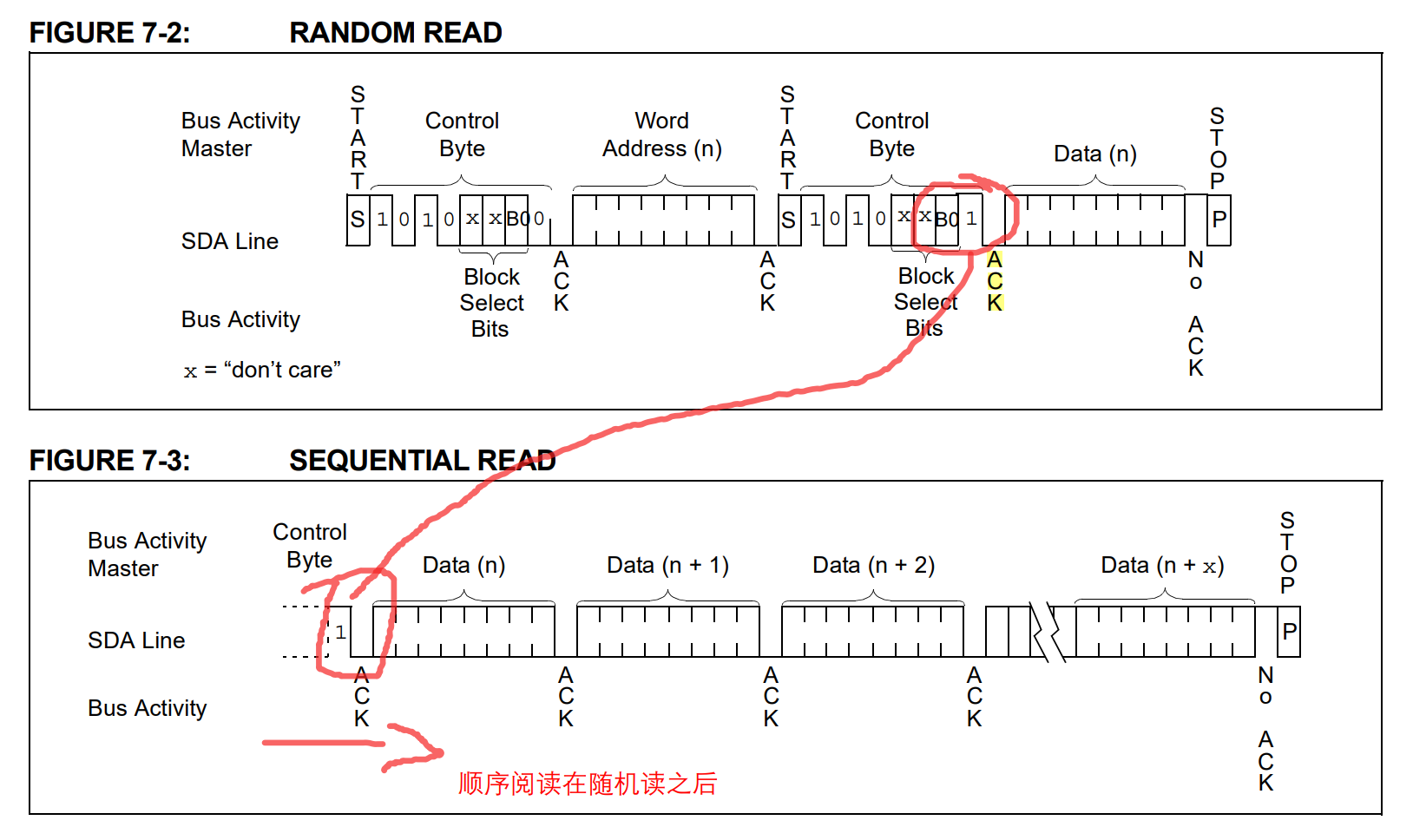
- 随机读先写开始位
- 然后写控制字节,从机接收到应答信号
- 然后dummuy write 虚写,写数据地址,从机接收到应答信号
- 然后开始位
- 然后读控制字节,从机接收到应答信号
- 然后读数据
- 最后结束位
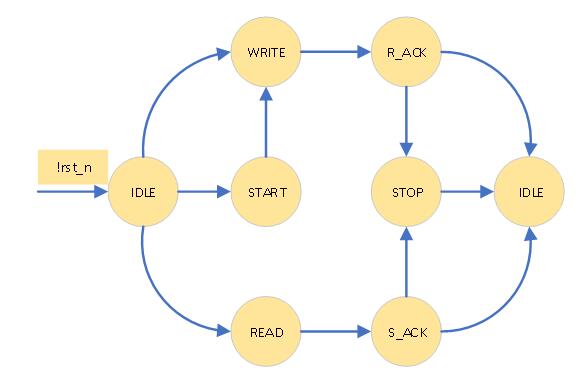
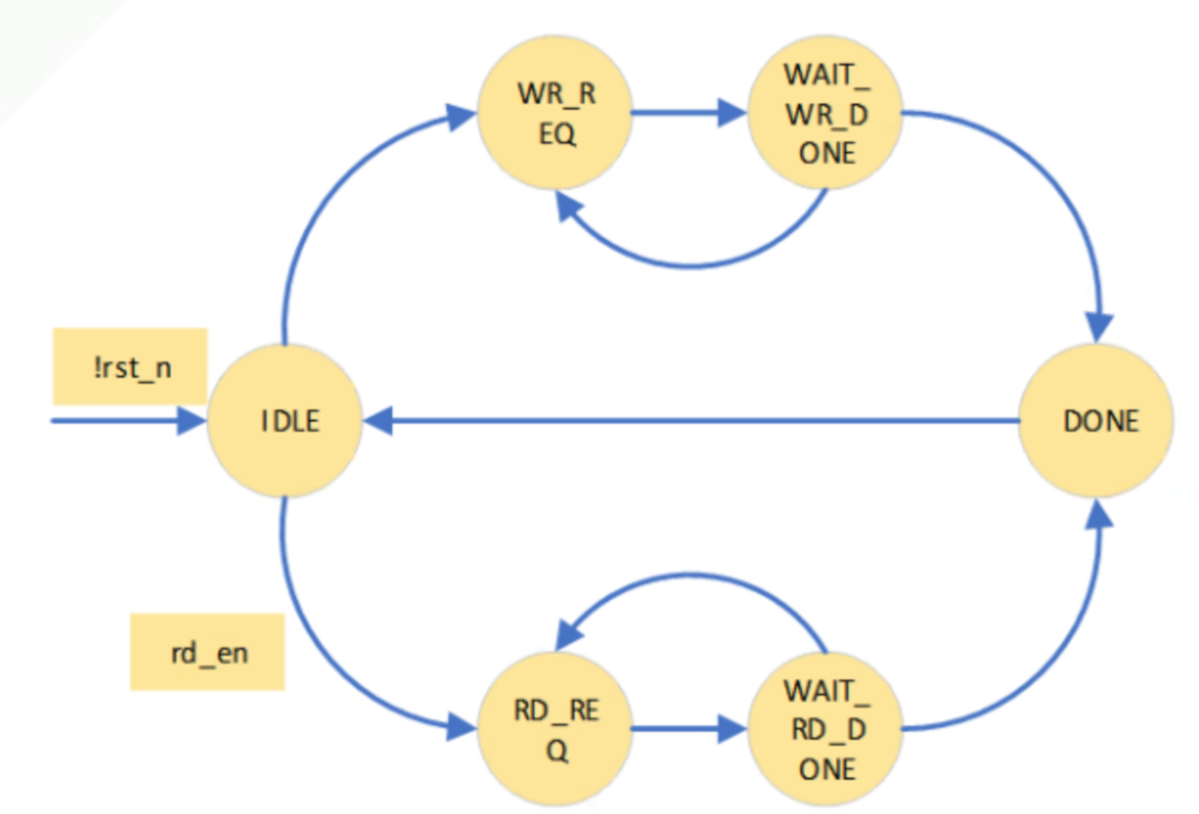
三、状态机设计
I2C接口模块:
EEPROM控制模块:
四、项目源码:
EEPROM驱动模块:
/**************************************功能介绍***********************************
Date : 2023年8月28日
Author : majiko
Version : 1.0
Description: eeprom驱动模块cmd 0 1开始位 NO YES 写数据 NO YES 读数据 NO YES 停止位 NO YES 应答位 ACK NO_ACK
*********************************************************************************/module eeprom_driver( input wire clk ,input wire rst_n ,input wire [7:0] wr_data ,input wire [4:0] cmd ,input wire cmd_vld ,inout wire i2c_sda ,output reg i2c_scl ,output wire [7:0] rd_data ,output wire rd_data_vld ,output reg done ,output reg rev_ack
);//内部参数定义//命令宏定义`define START_BIT 5'b00001`define WRITE_BIT 5'b00010`define READ_BIT 5'b00100`define STOP_BIT 5'b01000`define ACK_BIT 5'b10000`define ACK 0`define NO_ACK 1//状态定义parameter IDLE = 7'b000_0001,START = 7'b000_0010,WR_DATA = 7'b000_0100,R_ACK = 7'b000_1000,STOP = 7'b001_0000,RD_DATA = 7'b010_0000,T_ACK = 7'b100_0000;//i2c速率以及采样点定义parameter SCL_MAX = 50_000_000/100_000; //100K速率parameter SCL_1_4 = SCL_MAX/4;parameter SCL_3_4 = SCL_MAX*3/4;//内部信号定义//状态寄存器reg [6:0] cstate ;reg [6:0] nstate ;reg [7:0] wr_data_r ;//输入数据寄存reg [4:0] cmd_r ;//输入命令寄存reg [7:0] rev_data ; //跳转条件定义wire idle2start ;wire idle2wr_data ;wire idle2rd_data ;wire start2wr_data ;wire wr_data2r_ack ;wire r_ack2stop ;wire r_ack2idle ;wire stop2idle ;wire rd_data2t_ack ;wire t_ack2stop ;wire t_ack2idle ;//bit计数器reg [3:0] cnt_bit ;wire add_cnt_bit ;wire end_cnt_bit ;reg [3:0] bit_max ;//i2c分频计数器reg [8:0] cnt_scl ;wire add_cnt_scl ;wire end_cnt_scl ;//三态门信号定义reg sda_out ;wire sda_in ;reg sda_en ;//****************************************************************
//--数据寄存 命令寄存
//****************************************************************always@(posedge clk or negedge rst_n)beginif(!rst_n)beginwr_data_r <= 1'b0;endelse if(cmd_vld)beginwr_data_r <= wr_data;endelse beginwr_data_r <= wr_data_r;endendalways@(posedge clk or negedge rst_n)beginif(!rst_n)begincmd_r <= 1'b0;endelse if(cmd_vld)begincmd_r <= cmd;endelse begincmd_r <= cmd_r;endend
//****************************************************************
//--读写状态机
//****************************************************************//第一段 状态定义always @(posedge clk or negedge rst_n) beginif(!rst_n)begincstate <= IDLE;endelse begincstate <= nstate;endend//第二段 状态转移规律always@(*)begincase (cstate)IDLE : beginif(idle2start)beginnstate = START;endelse if(idle2wr_data)beginnstate = WR_DATA;endelse if(idle2rd_data)beginnstate = RD_DATA;endelse beginnstate = cstate;endendSTART : beginif(start2wr_data)beginnstate = WR_DATA;endelse beginnstate = cstate;endendWR_DATA : beginif(wr_data2r_ack)beginnstate = R_ACK;endelse beginnstate = cstate;endend R_ACK : beginif(r_ack2stop)beginnstate = STOP;endelse if(r_ack2idle)beginnstate = IDLE;endelse beginnstate = cstate;endendSTOP : beginif(stop2idle)beginnstate = IDLE;endelse beginnstate = cstate;endendRD_DATA : beginif(rd_data2t_ack)beginnstate = T_ACK;endelse beginnstate = cstate;endendT_ACK : beginif(t_ack2stop)beginnstate = STOP;endelse if(t_ack2idle)beginnstate = IDLE;endelse beginnstate = cstate;endend default: nstate = IDLE;endcaseendassign idle2start = (cstate == IDLE) && cmd_vld && (cmd & `START_BIT); assign idle2wr_data = (cstate == IDLE) && cmd_vld && (cmd & `WRITE_BIT); assign idle2rd_data = (cstate == IDLE) && cmd_vld && (cmd & `READ_BIT);assign start2wr_data = (cstate == START ) && end_cnt_bit && (cmd_r & `WRITE_BIT);assign wr_data2r_ack = (cstate == WR_DATA) && end_cnt_bit;assign r_ack2stop = (cstate == R_ACK) && end_cnt_bit && (cmd_r & `STOP_BIT); assign r_ack2idle = (cstate == R_ACK) && end_cnt_bit && !(cmd_r & `STOP_BIT);assign stop2idle = (cstate == STOP ) && end_cnt_bit; assign rd_data2t_ack = (cstate == RD_DATA) && end_cnt_bit;assign t_ack2stop = (cstate == T_ACK) && end_cnt_bit && (cmd_r & `STOP_BIT); assign t_ack2idle = (cstate == T_ACK) && end_cnt_bit && !(cmd_r & `STOP_BIT); //****************************************************************
//--i2c时钟分频
//****************************************************************always @(posedge clk or negedge rst_n)begin if(!rst_n)begincnt_scl <= 'd0;end else if(add_cnt_scl)begin if(end_cnt_scl)begin cnt_scl <= 'd0;endelse begin cnt_scl <= cnt_scl + 1'b1;end endend assign add_cnt_scl = cstate != IDLE;assign end_cnt_scl = add_cnt_scl && cnt_scl == SCL_MAX - 1'b1;//assign i2c_scl = (cnt_scl == (SCL_MAX - 1'b1) >> 1'b1 || stop2idle) ? 1'b1 : 1'b0;always@(posedge clk or negedge rst_n)beginif(!rst_n)begini2c_scl <= 1'b1;endelse if(cnt_scl == (SCL_MAX - 1) >> 1'b1 || stop2idle)begini2c_scl <= 1'b1;endelse if(end_cnt_scl)begini2c_scl <= 1'b0;endelse begini2c_scl <= i2c_scl;endend//****************************************************************
//--bit计数器
//****************************************************************always @(posedge clk or negedge rst_n)begin if(!rst_n)begincnt_bit <= 'd0;end else if(add_cnt_bit)begin if(end_cnt_bit)begin cnt_bit <= 'd0;endelse begin cnt_bit <= cnt_bit + 1'b1;end endend assign add_cnt_bit = end_cnt_scl;assign end_cnt_bit = add_cnt_bit && cnt_bit == bit_max - 1'b1;always @(*)beginif(cstate == WR_DATA || cstate == RD_DATA)beginbit_max = 'd8;endelse beginbit_max = 'd1;endend//****************************************************************
//--三态门控制
//****************************************************************assign sda_in = i2c_sda;assign i2c_sda = sda_en ? sda_out : 1'bz;//使能信号开启always @(posedge clk or negedge rst_n)beginif(!rst_n)beginsda_en <= 1'b0;endelse if(wr_data2r_ack || stop2idle || idle2rd_data)beginsda_en <= 1'b0;endelse if(idle2wr_data || idle2start || rd_data2t_ack || r_ack2stop || start2wr_data)beginsda_en <= 1'b1;endelse beginsda_en <= sda_en;endend
//****************************************************************
//--数据发送
//****************************************************************always@(posedge clk or negedge rst_n)beginif(!rst_n)beginsda_out <= 1'b1;endelse begincase(cstate)IDLE : sda_out <= 1'b1;START : beginif(cnt_scl == SCL_1_4)beginsda_out <= 1'b1;endelse if(cnt_scl == SCL_3_4)beginsda_out <= 1'b0;endelse beginsda_out <= sda_out;endendWR_DATA : beginif(cnt_scl == SCL_1_4)beginsda_out <= wr_data_r[7-cnt_bit];endelse beginsda_out <= sda_out;endendT_ACK : beginif(cnt_scl == SCL_1_4)beginif(cmd & `ACK_BIT)beginsda_out <= `NO_ACK;endelse beginsda_out <= `ACK;endendelse beginsda_out <= sda_out;endendSTOP : beginif(cnt_scl == SCL_1_4)beginsda_out <= 1'b0;endelse if(cnt_scl == SCL_3_4)beginsda_out <= 1'b1;endelse beginsda_out <= sda_out;endenddefault : sda_out <= 1'b1;endcaseendend//****************************************************************
//--数据接收
//****************************************************************always @(posedge clk or negedge rst_n)beginif(!rst_n)beginrev_ack <= 1'b0;rev_data <= 1'b0;endelse begincase(cstate)R_ACK : beginif(cnt_scl == SCL_3_4)beginrev_ack <= sda_in;endelse beginrev_ack <= rev_ack;endendRD_DATA : beginif(cnt_scl == SCL_3_4)beginrev_data[7-cnt_bit] <= sda_in;endelse beginrev_data <= rev_data;endenddefault : ;endcaseendend//****************************************************************
//--接口输出
//****************************************************************always @(posedge clk or negedge rst_n)beginif(!rst_n)begindone <= 1'b0;endelse begindone <= t_ack2idle || r_ack2idle || stop2idle;endend//assign done = (t_ack2idle || r_ack2idle || stop2idle) ? 1'b1 : 1'b0;assign rd_data = (t_ack2idle || t_ack2stop) ? rev_data : 1'b0;assign rd_data_vld = t_ack2idle || t_ack2stop;endmodule
EEPROM控制模块:
/**************************************功能介绍***********************************
Date : 2023年8月30日
Author : majiko
Version : 1.0
Description: EEPROM控制模块
*********************************************************************************/module eeprom_control
#(parameter ADDR_BIT = 8 //从机寄存器地址
)
(input wire clk ,input wire rst_n ,input wire [6:0] device_id ,//i2c从机设备地址input wire wr_req ,input wire rd_req ,input wire [ADDR_BIT - 1:0] reg_addr ,//配置寄存器地址input wire reg_addr_vld ,input wire [7:0] wr_data ,input wire wr_data_vld ,output wire [7:0] rd_data ,output wire rd_data_vld ,output wire ready ,output wire i2c_scl ,inout wire i2c_sda
);//参数定义//命令宏定义`define START_BIT 5'b00001`define WRITE_BIT 5'b00010`define READ_BIT 5'b00100`define STOP_BIT 5'b01000`define ACK_BIT 5'b10000parameter IDLE = 6'b000_001,WR_REQ = 6'b000_010,WR_WAIT = 6'b000_100,RD_REQ = 6'b001_000,RD_WAIT = 6'b010_000,DONE = 6'b100_000;parameter WR_CTRL_BYTE = 8'b1010_0000,RD_CTRL_BYTE = 8'b1010_0001;//内部信号定义//状态寄存器reg [5:0] cstate ;reg [5:0] nstate ;//跳转条件定义wire idle2rd_req ;wire idle2wr_req ;wire wr_req2wr_wait ;wire wr_wait2wr_req ;wire wr_wait2done ;wire rd_req2rd_wait ;wire rd_wait2done ;wire rd_wait2rd_req ;wire done2idle ;wire done ;reg [4:0] cmd ;reg cmd_vld ;reg [7:0] op_wr_data ;reg [7:0] addr_r ;reg [7:0] wr_data_r ;//字节计数器reg [2:0] cnt_byte ;wire add_cnt_byte ;wire end_cnt_byte ;reg [2:0] byte_mawr_addr ;//****************************************************************
//--寄存输入数据
//****************************************************************always @(posedge clk or negedge rst_n)beginif(!rst_n)beginaddr_r <= 1'b0;endelse if(reg_addr_vld)beginaddr_r <= reg_addr;endelse beginaddr_r <= addr_r;endendalways @(posedge clk or negedge rst_n)beginif(!rst_n)beginwr_data_r <= 1'b0;endelse if(wr_data_vld)beginwr_data_r <= wr_data;endelse beginwr_data_r <= wr_data_r;endend//****************************************************************
//--状态机
//****************************************************************always @(posedge clk or negedge rst_n)beginif(!rst_n)begincstate <= IDLE;endelse begincstate <= nstate;endendalways @(*)begincase(cstate)IDLE : beginif(idle2rd_req)beginnstate = RD_REQ;endelse if(idle2wr_req)beginnstate = WR_REQ;endelse beginnstate = cstate;endendWR_REQ : beginif(wr_req2wr_wait)beginnstate = WR_WAIT;endelse beginnstate = cstate;endendWR_WAIT : beginif(wr_wait2done)beginnstate = DONE;endelse if(wr_wait2wr_req)beginnstate = WR_REQ;endelse beginnstate = cstate;endendRD_REQ : beginif(rd_req2rd_wait)beginnstate = RD_WAIT;endelse beginnstate = cstate;endendRD_WAIT : beginif(rd_wait2done)beginnstate = DONE;endelse if(rd_wait2rd_req)beginnstate = RD_REQ;endelse beginnstate = cstate;endendDONE : beginif(done2idle)beginnstate = IDLE;endelse beginnstate = cstate;endenddefault : ;endcaseendassign idle2rd_req = cstate == IDLE && rd_req;
assign idle2wr_req = cstate == IDLE && wr_req;assign wr_req2wr_wait = cstate == WR_REQ && 1'b1;
assign wr_wait2wr_req = cstate == WR_WAIT && done;
assign wr_wait2done = cstate == WR_WAIT && end_cnt_byte;assign rd_req2rd_wait = cstate == RD_REQ && 1'b1;
assign rd_wait2done = cstate == RD_WAIT && end_cnt_byte;
assign rd_wait2rd_req = cstate == RD_WAIT && done;assign done2idle = cstate == DONE && 1'b1;//****************************************************************
//--字节计数器
//****************************************************************always @(posedge clk or negedge rst_n)begin if(!rst_n)begincnt_byte <= 'd0;end else if(add_cnt_byte)begin if(end_cnt_byte)begin cnt_byte <= 'd0;endelse begin cnt_byte <= cnt_byte + 1'b1;end endend assign add_cnt_byte = done;assign end_cnt_byte = add_cnt_byte && cnt_byte == byte_mawr_addr - 1'b1;always @(posedge clk or negedge rst_n) beginif(!rst_n)beginbyte_mawr_addr <= 1'b1;endelse if(wr_req)beginbyte_mawr_addr <= 'd3;endelse if(rd_req)beginbyte_mawr_addr <= 'd4;endelse if(end_cnt_byte)beginbyte_mawr_addr <= 1'b1;endelse beginbyte_mawr_addr <= byte_mawr_addr;endend//****************************************************************
//--接口模块控制
//****************************************************************task TX;input task_cmd_vld;input [4:0] task_cmd;input [7:0] task_wr_data;begincmd_vld = task_cmd_vld;cmd = task_cmd;op_wr_data = task_wr_data;endendtaskalways @(posedge clk or negedge rst_n) beginif(!rst_n)beginTX(0,5'h0,8'h00);endelse begincase(cstate)RD_REQ : case(cnt_byte)0 : TX(1,(`START_BIT | `WRITE_BIT),WR_CTRL_BYTE);//写控制字节1 : TX(1,(`WRITE_BIT),addr_r[7:0]);//写地址2 : TX(1,(`START_BIT | `WRITE_BIT),RD_CTRL_BYTE);//读控制字节3 : TX(1,(`ACK_BIT| `READ_BIT | `STOP_BIT),8'h00);//读数据default : TX(0,cmd,op_wr_data);endcaseWR_REQ : case(cnt_byte)0 : TX(1,(`START_BIT | `WRITE_BIT),WR_CTRL_BYTE);//写控制字节1 : TX(1,(`WRITE_BIT),addr_r[7:0]);//写地址2 : TX(1,(`WRITE_BIT | `STOP_BIT),wr_data_r);//写数据default : TX(0,cmd,op_wr_data);endcasedefault : TX(0,cmd,op_wr_data);endcaseendendeeprom_driver u_eeprom_driver( /*input wire */.clk (clk ),/*input wire */.rst_n (rst_n ),/*input wire [7:0] */.wr_data (op_wr_data ),/*input wire [4:0] */.cmd (cmd ),/*input wire */.cmd_vld (cmd_vld ),/*inout wire */.i2c_sda (i2c_sda ),/*output wire */.i2c_scl (i2c_scl ),/*output wire [7:0] */.rd_data (rd_data ),/*output wire */.rd_data_vld (rd_data_vld ),/*output wire */.done (done ),/*output reg */.rev_ack () );// iic_interface iic_interface_inst(// /* input */.clk (clk ),// /* input */.rst_n (rst_n ),// /* input [4:0] */.cmd (cmd ),// /* input */.cmd_vld (cmd_vld ),// /* output */.done (done ), //操作结束// /* output reg */.rev_ack ( ), //接收到的响应信号// /* input [7:0] */.wr_data (op_wr_data ), //伴随cmd_vld信号一起接收写数据// /* output [7:0] */.rd_data (rd_data ),// /* output */.rd_data_vld (rd_data_vld),// /* output reg */.iic_scl (i2c_scl ),// /* inout */.iic_sda (i2c_sda ) // );assign ready = cstate == IDLE;endmodule
UART RX模块:
//****************************************************************
//--majiko 2023-8-15 UART RX模块
//****************************************************************
module uart_rx
#(parameter BORT = 20'd115200,parameter CLOCK = 50_000_000,parameter CHECK_BIT = "None" //"None" 无校验,"Odd" 奇校验,"Even" 偶校验
)
(input wire clk ,input wire rst_n ,input wire ready ,//准备接受数据信号input wire rx ,output wire rx_data_vld ,//数据有效信号output wire [7:0] rx_data
);//参数定义parameter TIME_BORT = CLOCK/BORT;//状态机状态定义parameter IDLE = 4'b0001,//空闲状态电平默认拉高START = 4'b0010,//起始位赋值DATA = 4'b0100,//数据位赋值CHECK = 4'b1000;//波特率115200 1bit传输时间计数器参数//内部信号定义//状态寄存器reg [3:0] cstate ;reg [3:0] nstate ;//状态跳转条件wire idle2start ;wire start2data ;wire data2idle ;wire data2check ;wire check2idle ;//1Baud时间计数器reg [8:0] cnt_bort ;wire add_cnt_bort ;wire end_cnt_bort ;//比特计数器(复用)reg [2:0] cnt_bit ;wire add_cnt_bit ;wire end_cnt_bit ;reg [3:0] bit_max ;//计数器复用信号reg [7:0] rx_temp ; reg check_bit ;wire check_temp ;reg rx_r1 ;reg rx_r2 ;wire rx_nedge ;//rx同步至时钟域 并检测下降沿always@(posedge clk or negedge rst_n)beginif(!rst_n)beginrx_r1 <= 1'b1;rx_r2 <= 1'b1;endelse beginrx_r1 <= rx;rx_r2 <= rx_r1;endendassign rx_nedge = ~rx_r1 && rx_r2;//三段式状态机//第一段 时序逻辑always @(posedge clk or negedge rst_n) beginif(!rst_n)begincstate <= IDLE;endelse begincstate <= nstate;endend//第二段 组合逻辑always @(*)begincase (cstate)IDLE : beginif(idle2start)beginnstate = START;endelse beginnstate = cstate;endendSTART: beginif(start2data)beginnstate = DATA;endelse beginnstate = cstate;endendDATA : beginif(data2idle)beginnstate = IDLE;endelse if(data2check)beginnstate = CHECK;endelse beginnstate = cstate;endendCHECK: beginif(check2idle)beginnstate = IDLE;endelse beginnstate = cstate;endenddefault : nstate = IDLE;endcaseendassign idle2start = cstate == IDLE && rx_nedge;//检测到开始位,结束空闲状态,开始接收数据assign start2data = cstate == START && end_cnt_bit;assign data2idle = cstate == DATA && end_cnt_bit && CHECK_BIT == "None";assign data2check = cstate == DATA && end_cnt_bit;assign check2idle = cstate == CHECK && end_cnt_bit;//1Baud所需时间always @(posedge clk or negedge rst_n)begin if(!rst_n)begincnt_bort <= 'd0;end else if(add_cnt_bort)begin if(end_cnt_bort)begin cnt_bort <= 'd0;endelse begin cnt_bort <= cnt_bort + 1'b1;end endend assign add_cnt_bort = cstate != IDLE;assign end_cnt_bort = add_cnt_bort && cnt_bort == TIME_BORT - 1'b1;//8bit共需时间always @(posedge clk or negedge rst_n)begin if(!rst_n)begincnt_bit <= 'd0;end else if(add_cnt_bit)begin if(end_cnt_bit)begin cnt_bit <= 'd0;endelse begin cnt_bit <= cnt_bit + 1'b1;end endend assign add_cnt_bit = end_cnt_bort;assign end_cnt_bit = add_cnt_bit && cnt_bit == bit_max - 1'b1;//bit计数器复用always@(*)begincase(cstate)IDLE : bit_max = 1'b0;START : bit_max = 1'b1;DATA : bit_max = 4'd8;//8位数据位CHECK : bit_max = 1'b1;//校验位default : bit_max = 1'b0;endcaseend//状态输出always @(posedge clk or negedge rst_n)beginif(!rst_n)beginrx_temp <= 1'b0;endelse if(cstate == DATA && cnt_bort == (TIME_BORT >> 1))beginrx_temp[cnt_bit] <= rx_r1;endelse beginrx_temp <= rx_temp;endendassign rx_data = rx_temp;//校验位always @(posedge clk or negedge rst_n)beginif(!rst_n)begincheck_bit <= 1'b0;endelse if(cstate == CHECK && cnt_bort == (TIME_BORT >> 1))begincheck_bit <= rx;endelse begincheck_bit <= check_bit;endendassign check_temp = CHECK_BIT == "Odd" ? ~^rx_data : ^rx_data;assign rx_data_vld = CHECK_BIT == "None" ? data2idle : (check2idle && check_temp == check_bit) ? 1: 0;endmodule
UART TX模块:
//****************************************************************
//--majiko 2023-8-15 UART TX模块
//****************************************************************
module uart_tx
#( parameter BORT = 20'd115200,//波特率parameter CLOCK = 50_000_000,//系统时钟参数parameter CHECK_BIT = "None" //"None" 无校验,"Odd" 奇校验,"Even" 偶校验
)
(input wire clk ,input wire rst_n ,input wire [7:0] tx_data ,input wire tx_data_vld ,//数据有效信号output wire ready ,//准备接受数据信号output reg tx
);//参数定义parameter TIME_BORT = CLOCK/BORT;//状态机状态定义parameter IDLE = 5'b00001,//空闲状态电平默认拉高START = 5'b00010,//起始位赋值DATA = 5'b00100,//数据位赋值CHECK = 5'b01000,//奇偶校验位STOP = 5'b10000;//停止位赋值//波特率115200 1bit传输时间计数器参数//内部信号定义//状态寄存器reg [4:0] cstate ;reg [4:0] nstate ;//状态跳转条件wire idle2start ;wire start2data ;wire data2check ;wire data2stop ; wire check2stop ;wire stop2idle ;//1Baud时间计数器reg [8:0] cnt_bort ;wire add_cnt_bort ;wire end_cnt_bort ;//比特计数器(复用)reg [2:0] cnt_bit ;wire add_cnt_bit ;wire end_cnt_bit ;reg [3:0] bit_max ;//计数器复用信号reg [7:0] tx_data_r ;//寄存数据wire check_bit ;//三段式状态机//第一段 时序逻辑always @(posedge clk or negedge rst_n) beginif(!rst_n)begincstate <= IDLE;endelse begincstate <= nstate;endend//第二段 组合逻辑always @(*)begincase (cstate)IDLE : beginif(idle2start)beginnstate <= START;endelse beginnstate <= cstate;endendSTART: beginif(start2data)beginnstate <= DATA;endelse beginnstate <= cstate;endendDATA : beginif(data2check)beginnstate <= CHECK;endelse if(data2stop)beginnstate <= STOP;endelse beginnstate <= cstate;endendCHECK: beginif(check2stop)beginnstate <= STOP;endelse beginnstate <= cstate;endendSTOP : beginif(stop2idle)beginnstate <= IDLE;endelse beginnstate <= cstate;endenddefault : nstate <= IDLE;endcaseendassign idle2start = cstate == IDLE && tx_data_vld;//数据有效信号拉高,结束空闲状态,开始接收数据assign start2data = cstate == START && end_cnt_bit;assign data2check = cstate == DATA && end_cnt_bit;assign data2stop = cstate == DATA && end_cnt_bit && CHECK_BIT == "None"; assign check2stop = cstate == CHECK && end_cnt_bit;assign stop2idle = cstate == STOP && end_cnt_bit;//1Baud所需时间always @(posedge clk or negedge rst_n)begin if(!rst_n)begincnt_bort <= 'd0;end else if(add_cnt_bort)begin if(end_cnt_bort)begin cnt_bort <= 'd0;endelse begin cnt_bort <= cnt_bort + 1'b1;end endend assign add_cnt_bort = cstate != IDLE;assign end_cnt_bort = add_cnt_bort && cnt_bort == TIME_BORT - 1'b1;//不同状态bit数所需时间always @(posedge clk or negedge rst_n)begin if(!rst_n)begincnt_bit <= 'd0;end else if(add_cnt_bit)begin if(end_cnt_bit)begin cnt_bit <= 'd0;endelse begin cnt_bit <= cnt_bit + 1'b1;end endend assign add_cnt_bit = end_cnt_bort;assign end_cnt_bit = add_cnt_bit && cnt_bit == bit_max - 1'b1;//bit计数器复用always@(*)begincase(cstate)IDLE : bit_max = 1'b0;START : bit_max = 1'b1;//1位起始位数据DATA : bit_max = 4'd8;//8位数据位CHECK : bit_max = 1'b1;//1位奇偶校验位STOP : bit_max = 1'b1;//1位停止位数据default : bit_max = 1'b0;endcaseend//状态输出//输入数据寄存always@(posedge clk or negedge rst_n)beginif(!rst_n)begintx_data_r <= 1'b0;endelse if(tx_data_vld)begintx_data_r <= tx_data;endelse begintx_data_r <= tx_data_r;endend//奇偶校验位assign check_bit = CHECK_BIT == "Odd" ? ~^tx_data_r : ^tx_data_r;//数据输出always@(*)begincase(cstate)IDLE : tx = 1'b1;//空闲时为高电平START : tx = 1'b0;//起始位低电平DATA : tx = tx_data_r[cnt_bit];//数据位从低位开始发送CHECK : tx = check_bit;STOP : tx = 1'b1;//停止位高电平default : tx = 1'b1;endcaseendassign ready = cstate == IDLE;endmodule
顶层模块:
module top(input wire clk ,input wire rst_n ,input wire rx ,input wire key_in ,inout wire i2c_sda ,output wire i2c_scl ,output wire tx );wire ready ;wire [7:0] rx_data ;wire [7:0] tx_data ;wire rx_data_vld ;wire tx_data_vld ;wire key_out ;//模块例化eeprom_control u_eeprom_control(/*input wire */.clk (clk ),/*input wire */.rst_n (rst_n ),/*input wire [6:0] */.device_id (7'b1010_000 ),/*input wire */.wr_req (rx_data_vld ),/*input wire */.rd_req (key_out ),/*input wire [ADDR_BIT - 1:0] */.reg_addr (0),/*input wire */.reg_addr_vld (rx_data_vld ),/*input wire [7:0] */.wr_data (rx_data ),/*input wire */.wr_data_vld (rx_data_vld ),/*output wire [7:0] */.rd_data (tx_data ),/*output wire */.rd_data_vld (tx_data_vld ),/*output wire */.ready (),/*output wire */.i2c_scl (i2c_scl ),/*inout wire */.i2c_sda (i2c_sda ));// iic_control u_eeprom_control2// (// /*input wire */.clk (clk ),// /*input wire */.rst_n (rst_n ),// /*input wire [6:0] */.device_id (7'b1010_000 ),// /*input wire */.wr_req (rx_data_vld ),// /*input wire */.rd_req (key_out ),// /*input wire [ADDR_BIT - 1:0] */.addr (0),// /*input wire */.addr_vld (rx_data_vld ),// /*input wire [7:0] */.wr_data (rx_data ),// /*input wire */.wr_data_vld (rx_data_vld ),// /*output wire [7:0] */.rd_data (tx_data ),// /*output wire */.rd_data_vld (tx_data_vld ),// /*output wire */.ready (),// /*output wire */.iic_scl (i2c_scl ),// /*inout wire */.iic_sda (i2c_sda )// );uart_rx u_uart_rx(.clk (clk ),.rst_n (rst_n ),.ready ( ),.rx (rx ),.rx_data_vld (rx_data_vld ),.rx_data (rx_data ) );uart_tx u_uart_tx(.clk (clk ),.rst_n (rst_n ),.tx_data (tx_data ),.tx_data_vld (tx_data_vld ),.ready (ready ),.tx (tx ) );// ctrl u_ctrl (// /*input wire */.clk (clk ),// /*input wire */.rst_n (rst_n ),// /*input wire */.rx_data_vld (rx_data_vld ),// /*input reg [7:0] */.rx_data (rx_data ),// /*input wire */.ready (ready ),// /*output wire [7:0] */.tx_data (),// /*output wire */.tx_data_vld ()// );key_filter#(.WIDTH(1)) u_key_filter (/*input wire */.clk (clk ),/*input wire */.rst_n (rst_n ),/*input wire [WIDTH - 1:0] */.key_in (key_in ),/*output reg [WIDTH - 1:0] */.key_out (key_out ));endmodule
按键消抖模块:
module key_filter#(parameter WIDTH = 4) //参数化按键位宽
(input wire clk ,input wire rst_n ,input wire [WIDTH - 1:0] key_in ,//按键输入信号output reg [WIDTH - 1:0] key_out //输出稳定的脉冲信号
);parameter MAX = 20'd1_000_000;reg [19:0] cnt_delay ; //20ms延时计数寄存器
wire add_cnt_delay ; //开始计数的标志
wire end_cnt_delay ; //结束计数的标志reg [WIDTH - 1:0] key_r0 ; //同步
reg [WIDTH - 1:0] key_r1 ; //打一拍
reg [WIDTH - 1:0] key_r2 ; //打两拍wire [WIDTH - 1:0] nedge ; //下降沿寄存器//同步打拍
always @(posedge clk or negedge rst_n) beginif(!rst_n)beginkey_r0 <= {WIDTH{1'b1}};key_r1 <= {WIDTH{1'b1}};key_r2 <= {WIDTH{1'b1}};endelse beginkey_r0 <= key_in; //同步key_r1 <= key_r0; //寄存一拍key_r2 <= key_r1; //寄存两拍end
end//20ms计数器
always @(posedge clk or negedge rst_n)beginif(!rst_n)begincnt_delay <= 1'b0;endelse if(add_cnt_delay )beginif(nedge)begin //检测到下降沿从0开始计数cnt_delay <= 1'b0;endelse if(cnt_delay == MAX - 1'b1)begincnt_delay <= cnt_delay; //计数计满结束后保持,避免产生多个输出脉冲endelse begincnt_delay <= cnt_delay + 1'b1;endendelse begincnt_delay <= 1'b0;end
endassign nedge = ~key_r1 & key_r2; //下降沿检测
assign add_cnt_delay = 1'b1;
assign end_cnt_delay = add_cnt_delay && cnt_delay == MAX - 1'b1;//key_out脉冲信号赋值
always@(posedge clk or negedge rst_n)beginif(!rst_n)beginkey_out <= 'd0;endelse if(cnt_delay == MAX - 2'd2)begin //计数计满前一个脉冲时产生按键脉冲key_out <= ~key_in;endelse beginkey_out <= 'd0;end
endendmodule
五、实现效果
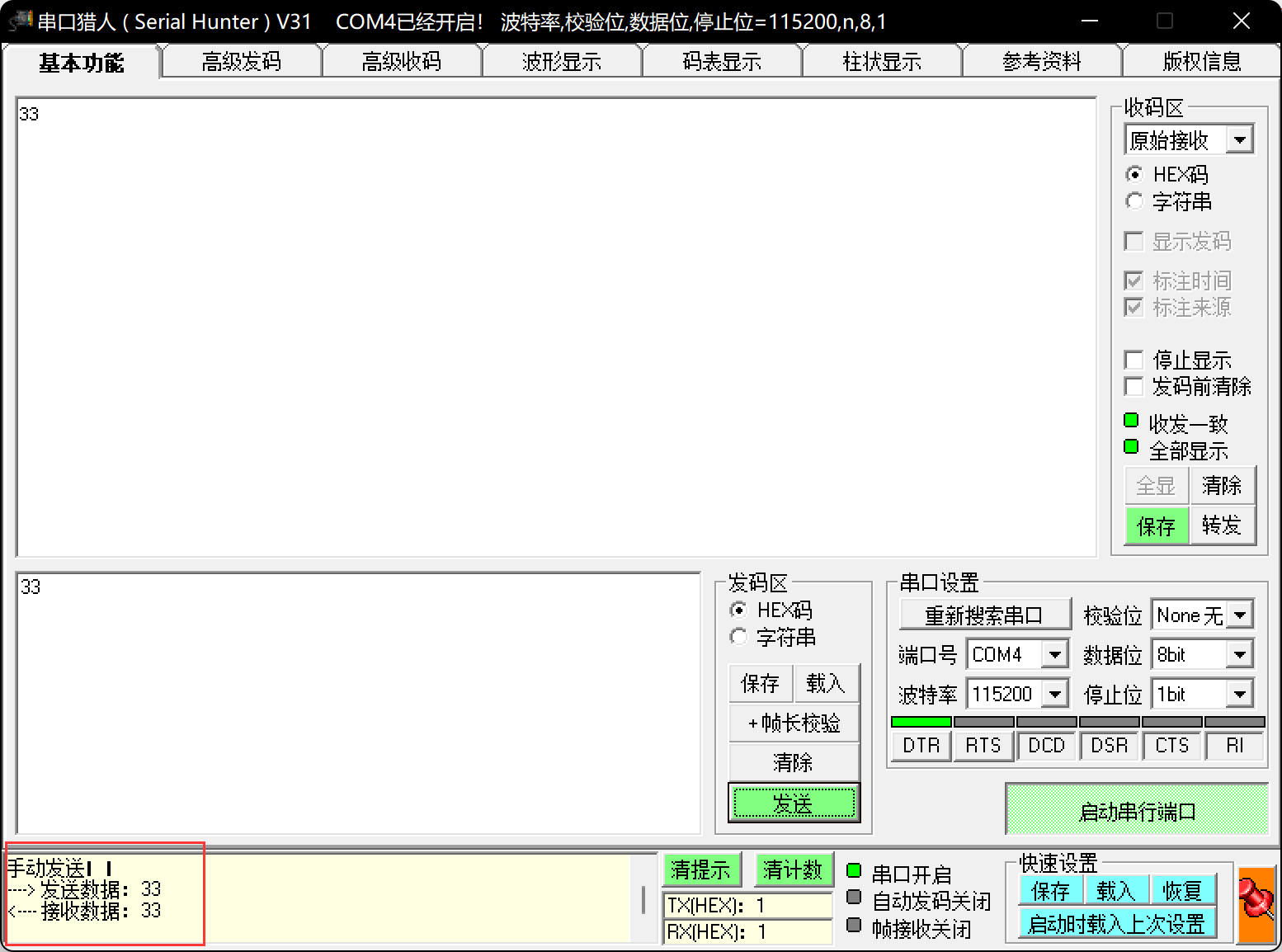
可以看出,能够正常进行单个字节的收发。
参考资料
https://blog.csdn.net/zhangduang_KHKW/article/details/121953275